
Fターム[3G093CB04]の内容
車両用機関又は特定用途機関の制御 (95,902) | 制御・作動条件(機関以外) (4,250) | 過渡時 (2,646)
Fターム[3G093CB04]の下位に属するFターム
Fターム[3G093CB04]に分類される特許
101 - 120 / 201
エンジンの制御装置
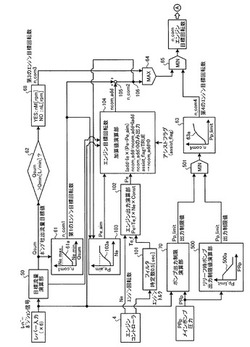
【課題】リリーフ時などの高負荷時におけるポンプ効率およびエンジン効率を高めること
。
【解決手段】エンジンによって駆動される油圧ポンプと、油圧ポンプから吐出された圧油
が供給される油圧アクチュエータと、各油圧アクチュエータを操作する操作レバーと、各
操作レバー手段の操作量を検出する検出手段と、操作レバーの操作量をもとに油圧ポンプ
の目標流量を演算する目標流量演算部50と、前記目標流量に応じて、エンジンの第1の
目標回転数を演算する第1の目標回転数演算部61と、油圧ポンプの負荷圧に応じてリリ
ーフ時におけるエンジンの最大目標回転数を制限するリリーフ時ポンプ出力制限値演算部
500および第4のエンジン目標回転数演算部63と、前記第1の目標回転数および前記
第4の目標回転数のうちのいずれか低い目標回転数に一致するように、エンジン回転数を
制御する回転数制御手段とを備える。
(もっと読む)
アイドルストップ機能を有する車両のエンジン制御方法
本発明は、アイドルストップ機能を有する車両を、アイドルストップ後、出発時にエンジン出力を適切に制御することにより、変速機を円滑で迅速に中立状態から運転状態に転換できるようにすることにより、変速衝撃を防止し、車両の出発遅延現象を排除することができる。  (もっと読む)
(もっと読む)
ハイブリッド車の制御装置

【課題】モータ走行時に、適切な潤滑油供給量を確保し、エンジンのポンピングロスおよびオイルポンプの損失を低減する。
【解決手段】エンジンと、2つのモータ・ジェネレータと、遊星歯車機構によって構成された動力分配装置とを備え、動力分配装置へ潤滑油を供給するオイルポンプとエンジンとがキャリアに連結され、一方のモータ・ジェネレータがサンギヤに連結され、他方のモータ・ジェネレータがリングギヤに連結されたハイブリッド車の制御装置において、モータ走行時に、スロットルバルブ開度を制御することにより、エンジンのポンピングロスを低減させるポンピングロス低減手段(ステップS4)と、一方のモータ・ジェネレータの回転を制御してオイルポンプの吐出量を制御することにより、車速に応じて動力分配装置で最低限必要量の潤滑油を供給する必要潤滑油量確保手段(ステップS5,S7)とを備えている。
(もっと読む)
動力出力装置、それを備えたハイブリッド自動車、および動力出力装置の制御方法
【課題】動力分配統合機構の第1および第2要素と駆動軸との連結状態をより適正に切り替えて、より広範な運転領域において動力の伝達効率を向上させる。
【解決手段】ハイブリッド自動車20では、変速機60によりキャリア45と駆動軸67とが連結されているときに所定の変速状態切替条件が成立すると、モータMG1の回転数を変速機60のギヤ比と駆動軸67の回転数とに基づく目標回転数Nm1*に一致させる回転数調整処理と、変速機60の目標変速段数n*に対応したギヤ列によるサンギヤ41と駆動軸67との連結と、同時係合状態でモータMG1,MG2間でトルクを移し換えてモータMG1,MG2が目標変速段数n*に対応した変速後状態において出力すべきトルクをそれぞれ出力するようにする動力移換処理と、キャリア45と駆動軸67との連結の解除とが実行される。
(もっと読む)
ハイブリッド車両の制御装置
【課題】バッテリの寿命が短くなるのを防ぐと共に、燃費を改善することが可能なハイブリッド車両の制御装置を提供する。
【解決手段】上記のハイブリッド車両の制御装置は、内燃機関と、バッテリの電力により駆動される電動機と、を備えたハイブリッド車両の制御装置であり、内燃機関始動手段と、充電制御手段と、を備える。内燃機関始動手段は、電動機の駆動のみによりハイブリッド車両が走行している状態で、バッテリの充電量が第1の所定値以下になったときに、内燃機関を始動してバッテリを充電する。充電制御手段は、内燃機関が始動した後、バッテリの充電量が、第1の所定値よりも高い第2の所定値よりも低い場合には、バッテリの充電を行う。これにより、内燃機関の負担を減らして、燃費を改善することができると共に、バッテリへのダメージを防いで、バッテリの寿命が短くなるのを防ぐことができる。
(もっと読む)
スリップ抑制装置及びスリップ状態推定方法
【課題】路面反力の推定精度を向上させること。
【解決手段】路面と駆動輪との間に発生するスリップを推定するにあたり、前記駆動輪に付与されるトルクと、前記駆動輪の回転角加速度とに基づき、前記路面から前記駆動輪への第1の路面反力を演算する(ステップS101)。次に、前記第1の路面反力の変化率を演算し(ステップS103)、前記第1の路面反力の変化率に基づいて路面反力補正量を求める(ステップS104)。次に、前記第1の路面反力と、前記路面反力補正量とから、前記路面から前記駆動輪への第2の路面反力を求める(ステップS105)。そして、前記第2の路面反力に基づいて、前記スリップを抑制するための駆動力を求め、前記駆動輪へ付与する。
(もっと読む)
車両のトラクションコントロール装置
【課題】四輪駆動車などの全輪駆動車両のトラクションコントロールに於いて、全輪スリップ兆候の検出に応答して車両の駆動出力の低減の実行を判断する際、車両の走行する路面状況を識別して、駆動出力の低減の必要性を考慮し、不要な駆動出力の低減の実行を回避すること。
【解決手段】本発明の全輪駆動車両のトラクションコントロール装置は、駆動輪の全輪がスリップ状態にある兆候を検出する全輪スリップ兆候検出手段と、路面の状況を識別するために車両の走行中の駆動力の損失を推定する駆動力損失推定手段と、車両の駆動輪に於ける駆動力を制御する駆動力制御手段とを含み、全輪がスリップ状態にある兆候が検出されたときには、それまでの駆動力の損失が所定値以下であるときに駆動力を低減する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジンと動力分割機構を介して接続されたモータジェネレータを備えるハイブリッド車両において、モータジェネレータのロック状態発生時にロック状態から確実に抜け出す。
【解決手段】エンジン回転数が燃費上の好適点305に設定された走行状態(310)からの車両増速時には、エンジン回転数を維持したままでMG1回転数を低下させて、出力部材の回転数を上昇させることが好ましい。この際に、MG1回転数がロック領域に入り、かつ、MG1トルクの増加によってはMG1回転数を正転領域から逆転領域へ遷移させてロック領域を脱出することが困難なケース(320)が発生し得る。このようなケースでは、エンジンの出力トルクを低下させるエンジン制御を行なうことにより、エンジンおよびMG1の回転数を全体的に低下させることにより、MG1トルクをこれ以上増大させることなく、MG1をロック状態から脱出させる(330)。
(もっと読む)
車両およびその制御方法
【課題】出力すべき駆動力を一端低下させその後上昇させたときに出力すべき駆動力により近い駆動力を出力する。
【解決手段】駆動輪の空転によるスリップが生じてから所定時間経過するまでは、通常時のレート値Nert1より小さなレート値Nert2を用いて上限回転数Nemaxを設定すると共に(S210)、上限回転数Nemaxを用いてエンジン目標回転数Ne*を設定し(S240〜S260)、目標回転数Ne*でエンジンが運転されると共にバッテリの入出力制限Win,Woutの範囲内で実行用要求トルクT*が駆動軸に出力されるようモータMG1,MG2のトルク指令Tm1*,Tm2*を設定する(S270〜S320)。これにより、エンジンの回転数の急増を抑制し、駆動軸に実行用要求トルクT*により近いトルクを出力することができる。
(もっと読む)
ハイブリッド車両
【課題】ハイブリッド車両において、電動機の駆動力により走行中、加速のために内燃機関の駆動力を必要とする場合に、内燃機関をアイドル回転数にて運転している場合でも、短い時間で機関回転と駆動軸の回転との同期を取る。
【解決手段】走行に応じた駆動力を発生し得るとともに発電機としても機能する電動機と、駆動力を発生する内燃機関と、駆動輪に駆動力を伝達する駆動軸と、電動機の駆動力を駆動軸に伝達する第一伝達系と、変速機と継手装置を備えその継手装置を接続した場合に変速機を介して内燃機関の駆動力を駆動軸に伝達する第二伝達系と、電動機が走行に必要な駆動力を出力するように制御する電動機駆動力制御手段と、継手装置を接続した状態で、変速機の入力側回転軸の回転数にほぼ等しくするように内燃機関の機関出力を制御する機関回転数制御手段とを備える。
(もっと読む)
ハイブリッド車両およびハイブリッド車両の制御方法
【課題】EV走行時に加速性能が大きく損なわれるのを抑制可能なハイブリッド車両を提供する。
【解決手段】EV優先スイッチがオンされているとき、走行モード制御部は、アクセル開度の増加に応じて駆動トルクがEV走行可能最大トルクTev_maxに達すると、アクセル開度が所定量ΔACCさらに増加するまで駆動トルクをEV走行可能最大トルクTev_maxに維持し、EV走行を維持する。そして、走行モード制御部は、アクセル開度が所定量ΔACCを超えてさらに増加すると、駆動トルクの維持を解除し、駆動トルクの増加に応じてEV走行からHV走行へ走行モードを切替える。
(もっと読む)
車両およびその制御方法
【課題】シフトレバー81が駐車ポジションの状態でエンジン22が運転されているときに変速機60の入力軸32aが回転しないようにする。
【解決手段】シフトポジションSPが駐車ポジションにある状態でエンジン22が下限回転数近傍で運転されているときには、モータMG1のトルク指令とエンジン22の下限回転数とに基づいて設定される回転制限制御用トルク以下のトルクに対してリングギヤ32の回転を制限できる程度をもってモータMG2のステータ46bに固定磁界が形成されるようモータMG2を制御する。これにより、エンジン22の下限回転数に応じた回転制限制御用トルクを用いてモータMG2に固定磁界を形成させることができ、より適正に変速機60の入力軸32aが回転しないようにすることができる。
(もっと読む)
車両走行支援装置
【課題】本発明は、運転者からの指示がある場合に限りトルクアップが実現される利便性の高い車両走行支援装置の提供を目的とする。
【解決手段】本発明は、車両の走行時の車輪の駆動トルクを変化させて車両の走行を支援する車両走行支援装置10において、前記駆動トルクを増加させるトルクアップ手段36,38と、前記トルクアップ手段の作動が許容される第1の状態と、前記トルクアップ手段の作動が抑制される第2の状態とを、車両乗員からの入力に応じて切り替える切替手段12とを備えることを特徴とする。
(もっと読む)
ハイブリッド車両制御装置
【課題】運転者毎にエンジン駆動とモータ駆動の切替制御を的確に行って燃料消費量を低減するハイブリッド車両制御装置を提供する。
【解決手段】車両2のメイン制御部20は、電子キー4から送信された運転者を識別するID351を受信部28で受信する。運転スケジュール情報抽出部37は、受信したID351とナビゲーション部34等からの走行経路情報356に基づいて、該当する運転履歴情報350を記憶部38から抽出する。車両2は、抽出された運転スケジュール情報352に基づいて走行する。
(もっと読む)
車両およびその制御方法
【課題】車両の走行に応じて二次電池などの蓄電装置の昇温を迅速に行なう。
【解決手段】バッテリ残容量が閾値S1未満のときや閾値S1以上でも閾値S2未満のときに車両要求パワーP*が閾値P1未満のときには充放電要求パワーPb*として充電用電力Pchaを設定し(S140)、バッテリ残容量が閾値S2以上ときや閾値S2未満でも閾値S1以上のときに車両要求パワーP*が閾値P2以上のときには充放電要求パワーPb*として放電用電力Pdisを設定し(S150)、バッテリ残容量が閾値S1以上で閾値S2未満であり且つ車両要求パワーP*が閾値P1以上で閾値P2未満のときには前回の充放電要求パワーPb*をそのまま設定し(S160)、充放電要求パワーPb*によりバッテリ50が充放電されると共に車両要求パワーP*で走行するようエンジンとモータMG1,MG2を制御する(S170〜S250)。
(もっと読む)
不整地用走行車
【課題】車輌がスタック状態に陥った時、過度のスロットル操作を行うこことなく、スタック状態を脱出でき、Vベルト等の早期磨耗を防止できる不整地用走行車を提供する。
【解決手段】エンジン回転数検出装置30と、メインプロペラ軸20のようなクラッチ装置の動力断続部より動力下流側に配置された回転部材の回転数を検出する動力下流側回転数検出装置31と、点火装置34等のエンジン回転数変更手段と、を備えている。前記動力下流側回転数検出装置31により検出されるメインプロペラ軸20の回転数が、0から前記エンジン3のエンゲージ回転数時の回転数までの範囲内で予め設定された設定回転数値より小さい時に、エンジン回転数Nが、前記エンゲージ回転数から所定の最大制限回転数の範囲内で予め設定された制限回転数値を越えないように、前記点火装置34を制御する。
(もっと読む)
油圧作業機械のエンジン回転数制御装置
【課題】エンジン回転数にハンチングを生じさせずに、エンジン回転数に起因する共振を防止することができる油圧作業機械のエンジン回転数制御装置を提供すること。
【解決手段】エンジン制御手段10において、演算処理装置32は、人力操作される操作部材の操作量検出器4から入出力インターフェース31に入力された検出値を目標回転数に変換し、その目標回転数を入出力インターフェース31を介してエンジンコントロールユニット20に指令する。エンジンコントロールユニット20はその目標回転数に従ってエンジンの燃料噴射ポンプ2aの制御を行う。前記検出値を目標回転数に変換するための検出値に対する目標回転数の特性は、予め設定された回転数の範囲外の目標回転数に、検出値を変換するための特性である。予め設定された回転数の範囲は、目標回転数の下限値から上限値までの範囲内において共振の原因になるエンジン回転数を含む範囲である。
(もっと読む)
ハイブリッド車両の制御方法
【課題】モータ走行からハイブリッド走行への移動する際のクラッチ締結時の滑りを減少させ、ショックを低減させる。
【解決手段】ハイブリッド車両10は、内燃エンジン12と、エンジン始動用のISGモータ14と、後輪を駆動するメインモータ26と、エンジン出力軸と前輪車軸との間に設けられたCVTプーリーベルト32と、内燃エンジンの出力軸とCVTの入力軸31との間に設けられたクラッチ16と、バッテリ24と、ハイブリッドコントローラ50と、を備える。ハイブリッドコントローラは、メインモータ26のみの車両走行状態からエンジン駆動力を追加するべきと判定したとき、クラッチ16が開放された状態でISGモータ14でエンジン12を始動させ、CVT入力速度が目標締結速度となるようにCVTの変速比を制御し、エンジン速度を検出し、CVT入力速度を検出し、両者の差が所定の範囲内となったとき、クラッチ16を締結させるように各要素を制御する。
(もっと読む)
省燃費運転支援装置
【課題】運転者に燃費を向上させる操作を把握させ、燃費向上に適した操作を働きかけることができる省燃費運転支援装置を提供すること。
【解決手段】運転者毎に燃費を算出して燃費の増減に基づき運転者にアドバイスを報知する省燃費運転支援装置1を提供する。省燃費運転支援装置1は、燃費が向上する運転操作又は自車両の走行状態を抽出し、抽出された運転操作又は走行状態に応じて、運転操作又は走行状態について燃費向上のためのアドバイスを運転者に報知する、ことを特徴とする。
(もっと読む)
エンジンの定速運転を変速制御可能な装置と結合する動力システム
【課題】エンジンの定速運転を変速制御可能な装置と結合する動力システムを提供する。
【解決手段】エンジン100が静止状態から起動、及び低速から加速して駆動する過程に、エンジン100を制御して、定速又は定速に近い速度で正味燃料消費率がより高い回転速度区域に運転させることができる。又、エンジンの出力端より、能動的に有段又は無段変速を制御可能な前側変速装置102を駆動することで、出力端から起動、及び低速から加速して駆動する過程及び運転を駆動する場合、エンジンが正味燃料消費率の比較的高い回転速度区域に運転することで、燃料を節約することができる。
(もっと読む)
101 - 120 / 201
[ Back to top ]