
Fターム[3G093CB04]の内容
車両用機関又は特定用途機関の制御 (95,902) | 制御・作動条件(機関以外) (4,250) | 過渡時 (2,646)
Fターム[3G093CB04]の下位に属するFターム
Fターム[3G093CB04]に分類される特許
41 - 60 / 201
車両の制御システム
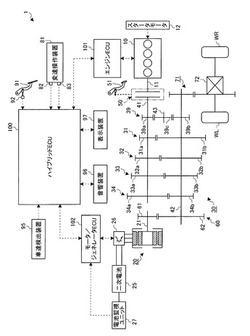
【課題】EV走行モードからの切り替えを運転者に対して十分に促すこと。
【解決手段】エンジン10の動力を用いたエンジン走行モード、モータ/ジェネレータ20の動力を用いたEV走行モード、又はエンジン10及びモータ/ジェネレータ20の双方の動力を用いたハイブリッド走行モード、を運転者に手動で選択させる走行モード選択装置と、運転者が走行モード選択装置によりEV走行モードを選択した際の車速に応じてモータ/ジェネレータ20の出力特性を設定し、モータ/ジェネレータ20よりもエンジン10の運転効率の方が優れているときに当該モータ/ジェネレータ20からの出力を抑制又は禁止するハイブリッドECU100及びモータ/ジェネレータECU102と、を備えること。
(もっと読む)
車両用制御システム

【課題】補機性能を適切に確保することができる車両用制御システムを提供することを目的とする。
【解決手段】駆動輪を駆動し車両を走行させる走行用駆動源3からの動力によって駆動する第1ポンプ61と、走行用駆動源3からの動力が伝達され駆動輪との間で相互に動力を伝達可能な出力部材51、及び、走行用駆動源3と出力部材51とを切り離し動力伝達を遮断可能なクラッチ部C1を含む動力伝達装置5と、駆動輪からの動力によって駆動して媒体を加圧する第2ポンプ62と、第2ポンプ62を含む補機を駆動可能な電動機11と、走行用駆動源3の作動が停止しクラッチ部C1にて走行用駆動源3と出力部材51とが切り離された状態で、車両の車速が所定車速以下である場合に、電動機11を制御し当該電動機11が発生させる動力によって補機を駆動する制御装置7とを備えることを特徴とする。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジンの始動/停止制御と自動変速機の変速制御のうち、一方の制御中に他方の制御要求があったとき、ショックを防止するだけでなく、ラグ・燃費への跳ね返りを最小限に抑えること。
【解決手段】ハイブリッド車両の制御装置は、エンジンEngと、モータ/ジェネレータMGと、第1クラッチCL1と、自動変速機ATと、統合コントローラ10と、ATコントローラ7と、エンジン/変速協調制御手段(図6)と、を備える。エンジン/変速協調制御手段は、エンジン始動/停止制御と自動変速機ATの変速制御のうち、一方の制御中に他方の制御要求があったとき、要求タイミングで他方の制御を開始してもショックが許容値を越えない場合、要求タイミングで他方の制御を開始し、要求タイミングで他方の制御を開始するとショックが許容値を越える場合、他方の制御を許可できるタイミングまで待って他方の制御を開始する。
(もっと読む)
車両の制御装置
【課題】エンジンE等の動力源から駆動輪3への動力伝達経路において少なくとも一対の動力伝達部材が互いに遊びをもって係合している場合に、その係合部分の遊びに起因してショックが発生することを、大幅なコストアップを招くことなく判定できるようにする。そのショックを抑えるように車両を制御して、乗り心地を向上させる。
【解決手段】遊びのある係合部分よりも動力伝達上流側にある入力軸24の回転速度Viの変化率から、その係合部分における動力伝達部材同士の非接触状態を判定する第1判定部61と、入力軸回転速度Vi及び後輪回転速度Vrの回転速度差Vから非接触状態を判定する第2判定部62と、非接触状態が判定されたときに前記係合部分の下流側及び下流側の回転速度差Vが小さくなるように、車両を制御する制御手段63と、を備えている。
(もっと読む)
惰行制御装置
【課題】惰行制御中のアクセル開度の変化幅が大きい運転者に対してもアクセル開度の変化幅が小さい運転者と同等に惰行制御が実施できる惰行制御装置を提供する。
【解決手段】アクセル開度の変化幅を学習し、惰行制御可能領域CAの領域幅よりアクセル開度の変化幅が大きいときには惰行制御可能領域CAを拡大させ、惰行制御可能領域CAの領域幅よりアクセル開度の変化幅が小さいときには惰行制御可能領域CAを縮小させる惰行制御可能領域調節部4を備える。
(もっと読む)
運転診断装置、及びプログラム
【課題】運転診断装置において、惰力走行を行っている自動車が加速と減速とを連続して実行する状況下での停止所要時間の計測精度を向上させること。
【解決手段】アクセルがオフ状態とされることにより、燃料カットが実行されて惰力走行による減速を開始すると(t11)、アクセルがオフ状態となってからの経過時間の計測を開始する。走行速度Vが停止前速度V1以下となると(t12)、当該経過時間の計測を継続しつつ、その時点(t12)での経過時間T1を記憶部に記憶する。下り坂を走行し終えて(t15)減速することで、走行速度Vが停止前速度V1以下となると(t16)、経過時間の計測を継続しつつ、その時点(t16)での経過時間T2を記憶部に記憶(更新)する。走行速度Vが停止速度V0となると(t17)、経過時間の計測を終了すると共に、記憶部に記憶されている経過時間T2を停止所要時間として決定する。
(もっと読む)
車両の制御装置
【課題】車両のブレーキとアクセルの同時踏み込み時の安全性を向上させる。
【解決手段】車両には、アクセル開度を検出するアクセルセンサ12と、ブレーキ操作を検出する2つのブレーキスイッチ13,14を設ける。2つのブレーキスイッチ13,14のいずれか一方がオフ故障すると、運転者がブレーキを踏み込んでも当該オフ故障したブレーキスイッチがオフ状態のまま維持されるが、運転者がブレーキを踏み込むと、故障していない方のブレーキスイッチがオンする。このとき、アクセルセンサ12が所定開度より大きければ、アクセルとブレーキの両方が同時に踏み込まれて出力制限実行条件が成立していると判断して、駆動源11(エンジン及び/又はモータ)の出力を所定値以下に制限する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 内燃機関の燃焼モードを火花点火燃焼モードから圧縮着火燃焼モードに切り換える際に、気筒内の温度の低下を抑制でき、それにより、切換後の圧縮着火燃焼を安定して良好に行うことができるハイブリッド車両の制御装置を提供する。
【解決手段】 圧縮着火燃焼モードと火花点火燃焼モードに燃焼モードを切り換えて運転される内燃機関3と、電気モータ4を、動力源として備えるハイブリッド車両Vの制御装置において、火花点火燃焼モードから圧縮着火燃焼モードへの燃焼モードの切換時に、内燃機関3への燃料の供給を停止し(図7のステップ11)、ハイブリッド車両Vの動力を得るために、電気モータ4を駆動する(ステップ13)とともに、気筒C内を保温するために、点火プラグ17から火花を発生させる火花発生動作を実行する(ステップ12)。
(もっと読む)
ハイブリッド車の制御装置
【課題】力行側の制御と回生側の制御との切替時に歯打ち音が発生することを抑制する。
【解決手段】エンジンとモータジェネレータとを備えたハイブリッド車の制御装置において、エンジンの軸トルクに基づいて、モータジェネレータの力行の制御と回生の制御との切り替えを行なう切替部を備える。エンジンのトルクが働かない時期にモータジェネレータの制御を切り替えることにより、歯打ち音の発生を抑制する。
(もっと読む)
車両の作動方法
【課題】従来技術における欠点に鑑みこれを解決すべく改善を行うこと。
【解決手段】変速機と駆動エンジンの間で惰性走行モードが実施され、前記惰性走行モードの経過後にアクセルペダルが操作された場合に、推奨変速段が提供されると共に駆動エンジンの現下の回転数が推奨回転数まで加速され、前記推奨回転数は、車両の現下の速度状況のもとで推奨変速段に対応させる。
(もっと読む)
車両の駆動制御装置
【課題】電動機のみでの走行時に、内燃機関を始動する際のトルク変動を防止できる車両の駆動制御装置を提供する。
【解決手段】この発明による車両の駆動制御装置は、内燃機関の吸気量を増加させることにより内燃機関のポンプロスを低減する手段を備え、電動機走行モード中は、内燃機関の吸気量を要求吸気量よりも増加させると共に、その吸気量増加分を運転者の要求トルクの増加に応じて減少させることで、内燃機関の燃焼を停止している時のポンプロスを低減しつつ、内燃機関始動時のトルク急増を防止するようにしたものである。
(もっと読む)
内燃機関及び該内燃機関の運転の制御方法
作業車輌
【課題】エンジンの回転速度を低減する低回転制御を行う作業車輌の操作性を向上する。
【解決手段】緊急ブレーキペダルが踏み込まれてブレーキが作動すると(ステップS2)、作業者の操作によりエンジンの回転速度の変更が規制される(ステップS4)と共に、その回転速度を、アイドリング回転速度とする(ステップS5)制動時回転制御が実行される。この制動時回転制御は、アクセルレバーがアイドリング位置に操作される(ステップS8)と解除される(ステップS9)。また、同様に車輌が走行も作業もしていない際に、エンジンの回転速度を、アイドリング回転速度にするデセル制御(ステップS11)も、アクセルレバーがアイドリング位置に操作されると解除される。
(もっと読む)
車両の制御装置
【課題】車体の加速時振動の発生時期を正確に予測し、ひいてはその抑制に係る制御を最適なタイミングで実行可能とすることのできる車両の制御装置を提供する。
【解決手段】電子制御ユニット1は、被駆動状態から中立状態への切り替わりに伴うエンジン2及びトランスアクスルの姿勢変化に起因したギャップセンサー4によるトランスアクスル出力軸の回転速度検出値の変動の確認に応じて、車体の加速時振動の発生時期を予測し、エンジン2のトルクダウンを実施する。
(もっと読む)
エンジン自動停止始動制御装置
【課題】自律復帰制御による再始動が失敗したとしても、その後ピニオンをリングギヤにスムーズに噛み込ませることができるようにする。
【解決手段】エンジン回転速度が第1回転速度領域で再始動要求された場合、クランキングを行わずに燃料噴射を再開して再始動させる自律復帰制御手段と、エンジン回転速度が第2回転速度領域で再始動要求された場合、ピニオンの回転速度をリングギヤの回転速度に同期させた後にピニオンをリングギヤに噛み合わせて再始動させる先回し制御手段と、エンジン回転速度が第3回転速度領域で再始動要求された場合、ピニオンをリングギヤに噛み合わせた後でピニオンを回転させて再始動させる先出し制御手段とを備え、自律復帰制御による再始動失敗が検出された場合には、その失敗検出時点から所定時間Tbが経過するまでは先回し制御を禁止する(S204)とともに、所定時間Tbが経過した時点で先出し制御を実施する(S205)。
(もっと読む)
アイドルストップ車の制御装置
【課題】アイドルストップ車において、通信手段の通信の遅れに起因する車両のずり下がりが生じないようにする。
【解決手段】ブレーキアクチュエータ7のブレーキ制御ユニット13により、アイドルストップ制御ユニット12から車内ネットワーク11を介して受信したブレーキ力制御情報に基づいてブレーキ力を付与したときに、車内ネットワーク11を介してアイドルストップ制御ユニット12にブレ-キ力付与の制御実施情報を送信し、アイドルストップ制御ユニット12により、車内ネットワーク11を介して受信したブレ-キ力付与の制御実施情報を確認し、実際にブレーキ力が付与された状態になっていることを確認してからでないとエンジンの自動停止制御を開始しないようにして、車内ネットワーク11の通信の遅れに起因するアイドルストップ車1のずり下がりが生じないようにする。
(もっと読む)
トラクション制御装置、及び駆動力抑制方法
【課題】 不所望なトラクション制御の実行を防ぐことができるトラクション制御装置を提供する。
【解決手段】 トラクション制御装置18は、後輪3を空転量に応じて変化する監視値Mを演算し、且つこの監視値Mが第1駆動力抑制条件を充足するか否かを判定し、この判定に基づいて後輪3の駆動力を減少させるトラクション制御を実行するエンジンECU17を備える。エンジンECU17は、前後輪2,3の回転数の差の変動率ΔSlipとエンジン回転の変動率ΔNeに基づいて前記駆動力抑制条件を可変的に設定するようになっている。
(もっと読む)
車両の特性評価システム及び制御システム、並びに騎乗型車両及びバンク車両の特性評価方法
【課題】発生トルク及びグリップ性能に関する特性を表す新規且つ作成容易な形態を提供する。
【解決手段】特性評価システム50が、車両1の動力源13の出力増減に対する要求を示す出力増減要求値を検出する出力要求検出手段51と、動力源13の出力により回転駆動される駆動輪3の空転の程度を表すスリップ値を測定するスリップ値測定手段52と、走行中における出力増減要求値とスリップ値との関係を車両特性評価値f1として記憶する評価値記憶手段53と、を備える。
(もっと読む)
動力伝達装置
【課題】回転子同士の電磁気結合によるトルクを利用して動力伝達が行われる状態から、係合装置の係合により動力伝達が行われる状態への移行を、駆動トルクの低下を抑えながら円滑に行う。
【解決手段】電子制御ユニット50は、入力側ロータ28と出力側ロータ18との間に作用するトルクによりエンジン36から駆動軸37への動力伝達が行われる状態から、クラッチ48の係合によりエンジン36から駆動軸37への動力伝達が行われる状態に移行する場合に、入力側ロータ28の回転速度が出力側ロータ18の回転速度に近づくようにエンジン36の回転速度を制御しつつ、蓄電装置42からの直流電力をインバータ40で交流に変換してステータ巻線20へ供給することでステータ16と出力側ロータ18との間にトルクを作用させるようにインバータ40で行われる電力変換を制御する。
(もっと読む)
ハイブリッド自動車
【課題】排気を浄化する浄化触媒の暖機が必要とされると共に走行に要求される要求パワーをバッテリからの電力だけでは出力することができないときに要求パワーを出力して走行すると共にエミッションの悪化を抑制する。
【解決手段】浄化触媒33の暖機が必要とされると共に走行用に要求される走行用パワーがバッテリ48の出力制限に相当するパワーより大きいときには、バッテリ48の蓄電割合(SOC)が大きいほど遅く且つ浄化触媒33の劣化の程度が大きいほど遅いタイミングでの点火を伴って走行用パワーから出力制限に相当するパワーを減じたパワーがエンジン32から出力されると共に要求パワーにより走行するようエンジン32とモータ41,42とを制御する。
(もっと読む)
41 - 60 / 201
[ Back to top ]