
Fターム[3G093CB04]の内容
車両用機関又は特定用途機関の制御 (95,902) | 制御・作動条件(機関以外) (4,250) | 過渡時 (2,646)
Fターム[3G093CB04]の下位に属するFターム
Fターム[3G093CB04]に分類される特許
21 - 40 / 201
車両制御装置
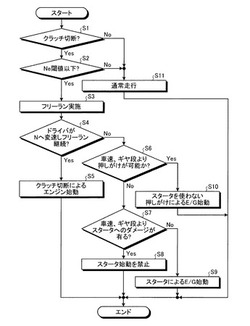
【課題】手動変速機を搭載した車両において走行中にエンジンを始動する場合のスタータの負荷を低減することができる車両制御装置を提供すること。
【解決手段】エンジンと、エンジンと車両の駆動輪との動力の伝達を接続あるいは遮断するクラッチを有する手動変速機と、出力する動力によってエンジンを始動するときにエンジンに接続されるスタータと、を備え、クラッチがエンジンと駆動輪との動力の伝達を遮断し(S4否定)、かつエンジンが停止した(S3)惰性走行中にエンジンの始動要求がなされたときに、車速および手動変速機において選択されている変速段が、スタータに対する負荷の小さい車速および変速段である(S7否定)場合、クラッチがエンジンと駆動輪との動力の伝達を接続した状態でスタータによってエンジンを始動することを許容する(S8)。
(もっと読む)
停止持に振動を低減する多気筒内燃機関とそれを搭載した車両、および振動を低減する方法。

【課題】
アイドリングストップ操作による惰行走行時の内燃機関の気筒内圧の圧力変動を低く抑え、パワープラント懸架系の振動を低減する。
【解決手段】
直列4気筒型の多気筒内燃機関10は、ピストン上下運動が互いに逆相となる第1気筒11と第2気筒12および第3気筒13と第4気筒14のそれぞれに、対の気筒を連通する短絡管21を設け、短絡管21と気筒11〜14との間に開閉弁30を設け、アイドリングストップ時に、短絡管21を開放し、第1気筒11と第2気筒12との間および第3気筒13と第4気筒14との間で気体の出し入れを行うように構成される。
(もっと読む)
車両のエンジン制御装置
【課題】アクセルとブレーキの両方が踏み込まれた場合にエンジンの出力を制限する出力制限制御を実行するシステムの安全性とドライバビリティを両立させる。
【解決手段】アクセルセンサ31とブレーキスイッチ32の出力信号に基づいて、アクセル操作が検出された後にブレーキ操作が検出されてアクセル操作とブレーキ操作の両方が検出された状態になった場合と、ブレーキ操作が検出された後にアクセル操作が検出されてアクセル操作とブレーキ操作の両方が検出された状態になった場合との間で、出力制限制御の実行条件や制御量を変更する。これにより、アクセル操作とブレーキ操作の両方が検出された状態になった場合に、アクセル操作とブレーキ操作の検出順序に応じて出力制限制御の実行条件や制御量を適正に変更して、アクセル操作とブレーキ操作の検出順序に応じた適正な条件で出力制限制御を実行することができる。
(もっと読む)
エンジントルク推定装置
【課題】車両におけるエンジン及びモータ・ジェネレータが小型化された場合であっても、精度良くエンジントルクを推定する。
【解決手段】エンジントルク推定装置(100)は、エンジン(10)と、該エンジンのクランクシャフト(101)にダンパ(14)を介して接続されたインプットシャフト(131)と、該インプットシャフトに連結されたモータ・ジェネレータ(11)と、を備える車両に搭載される。エンジントルク推定装置は、エンジンの回転角速度、モータ・ジェネレータの回転角速度、及び、インプットシャフトの回転角速度にインプットシャフトの慣性モーメントを乗算した値、に基づいて、エンジントルクを推定する推定手段(20)を備える。
(もっと読む)
電気自動車の制御装置
【課題】発電用のエンジンを搭載したレンジエクステンダ型の電気自動車において、排出ガス浄化率を確保しながら低コスト化の要求を満たすことができるようにする。
【解決手段】発電用のエンジン10は、要求発電量等に応じて運転モードを切り換えるとき以外は定常運転することができるため、過渡運転時の空燃比制御の応答性をあまり必要としない。この点に着目して、触媒38の下流側に排出ガスセンサ39(例えば酸素センサ)を設置し、この排出ガスセンサ39の出力に基づいて空燃比フィードバック制御を実行する。これにより、触媒の上流側に排出ガスセンサを設置する場合に比べて、排出ガスセンサ39の出力特性の変化(ばらつき)を小さくして、空燃比制御精度の低下を抑制することができ、触媒38の排出ガス浄化率を確保することができる。また、触媒の上流側と下流側の両方に排出ガスセンサを設置する場合に比べて、低コスト化できる。
(もっと読む)
車両の制御装置および車両の制御方法
【課題】アクセルポジションセンサに故障が生じた場合に走行状態に応じた適切な退避走行を可能とする車両の制御装置を提供する。
【解決手段】HVECU40は、メインセンサに故障が発生した場合に、車速センサ39またはストップランプスイッチ34などによって検出された車両状態が第1の状態であるときには、アクセルフェールモードに動作モードを設定する。HVECU40は、メインセンサ52Mに故障が発生した場合に、サブセンサ52Sが正常であればアクセルフェールモードに動作モードを設定し、メインセンサ52Mに故障が発生した場合に、状態検出センサによって検出された車両状態が第2の状態であるときには、サブセンサ52Sが異常であればアクセルレスモードに動作モードを設定する。
(もっと読む)
車両制御装置
【課題】エネルギーの利用効率を向上できる車両制御装置を提供すること。
【解決手段】車両100の運動エネルギーを作動流体の圧力に変換して蓄圧すること、および蓄圧された作動流体の圧力を車両の動力に変換して出力することが可能な変換装置32と、車両の運動エネルギーを電力に変換して蓄電すること、および蓄電された電力を車両の動力に変換して出力することが可能なモータジェネレータ4と、を備え、車両が長時間停止すると予測される所定状況において、変換装置による力行をモータジェネレータによる力行よりも優先すること、あるいは変換装置による回生よりもモータジェネレータによる回生を優先することの少なくともいずれか一方を実行する。
(もっと読む)
車両内燃機関の制御装置。
【課題】上記のような駐車支援装置10が搭載されている車両に、アイドルストップ制御を行う内燃機関1が搭載された場合には、駐車支援中であるにも関わらず、内燃機関1の停止条件が成立し、運転者の意図に反して内燃機関1が停止する場合があった。
【解決手段】自動停止制御における内燃機関1の停止条件として、駐車支援制御が行われていないことを含んでおり、駐車支援制御中には、内燃機関の自動停止制御が禁止される。
(もっと読む)
ハイブリッド自動車
【課題】後進登坂路を後進走行するときに車両が停止したときに、電動機を駆動する電動機用インバータの特定のスイッチング素子への電流の集中を抑制すると共に登坂しやすくする。
【解決手段】後進登坂路を後進走行するときに車両が段差のために停止している段差停止状態であるときには、所定時間trefが経過するまでは、モータを駆動するインバータの複数のトランジスタのうち特定のトランジスタへの電流の集中を抑制する際のモータからのトルクの減少率(図中、破線)より大きな所定トルク減少率ΔTを用いてモータのトルク指令Tm2*を設定してモータのトルクを大きく減少させ、所定時間trefが経過したとき以降は、後進走行制御を実行する。
(もっと読む)
DPFの制御装置
【課題】作業に支障が少ない場合には作業を継続しつつDPFを再生することができるDPFの制御装置を提供する。
【解決手段】エンジン41からの排気ガス中の粒子状物質を捕集するフィルタ31と、堆積した粒子状物質を除去してフィルタ31を再生する再生手段32と、を有するDPFの制御装置2である。
そして、DPFの制御装置2は、フィルタ31に堆積した粒子状物質の堆積量を検出する堆積量検出手段33a,33bと、エンジン41によって回転される油圧ポンプ47から供給される圧油で駆動される作業機と、堆積量を複数の堆積レベルLaに区分するとともに作業機の状態を複数の作業状態レベルLwに区分し、フィルタ31の再生を許容する条件として検出された堆積レベルLaに対応した作業状態レベルLwを設定する制御手段20と、を備えている。
(もっと読む)
車両用走行制御装置
【課題】ハイブリッド車両が手動変速状態であるときに、エンジンの始動および停止を適切に制御する。
【解決手段】駆動輪に駆動力を伝達する駆動源としてのエンジン及びモータと、変速機の変速を制御する変速制御手段と、変速制御手段に対して手動による変速操作を入力する手動変速操作手段と、コースト状態で、手動変速操作手段の操作によって手動変速状態となった場合に、手動変速操作手段による操作がシフトダウン操作であるときに、エンジンを始動する始動制御手段と、を備える。
(もっと読む)
エンジン自動停止再始動装置
【課題】エンジン自動停止再始動装置において、牽引時の自動停止制御に運転者の意思を反映可能にすると共に、牽引時においても自動停止によるエネルギ消費の削減の選択を可能にする。
【解決手段】エンジン自動停止再始動装置は、運転者により操作されて自動停止の許可および禁止を切り換える自動停止禁止スイッチと、該自動停止禁止スイッチによる自動停止の許可および禁止の切換操作の有無を検出する切換操作検出手段と、被牽引物の牽引の有無を検出する牽引スイッチとを備える。エンジン自動停止再始動装置の制御手段は、自動停止禁止スイッチによる切換操作が検出され(S9)、かつ牽引が検出された(S8)ときに、牽引の有無とは無関係に、自動停止禁止スイッチに基づいて自動停止の許可および禁止を行い、自動停止禁止スイッチによる切換操作が検出されず(S9)、かつ牽引が検出された(S8)ときに、自動停止を禁止する(S10)。
(もっと読む)
ハイブリッド車両の駆動力制御装置
【課題】駆動力段差の発生を抑制するに好適なハイブリッド車両の駆動力制御装置を提供する。
【解決手段】加速意図としてアクセル開速度ΔAPOを用い、アクセル開速度ΔAPOが第一閾値未満の低速度であるときは、実アクセル開度に対して小さい値となるような遅開き特性βにより修正した制御用アクセル開度に基づき、駆動力の決定と走行モードを切り替える。また、アクセル開速度ΔAPOが第一閾値及び第一閾値よりも大きい値に設定した第二閾値以上である時は、実アクセル開度に対して前記遅開き特性βよりも大きくなる早開き特性αにより修正した制御用アクセル開度に基づき、駆動力の決定と走行モードを切り替える。また、アクセル開速度ΔAPOが第一閾値と第二閾値の間であれば、前記遅開き特性βと早開き特性αとの中間特性となるような開度特性に基づき、駆動力の決定と走行モードを切り替えるようにした。
(もっと読む)
車両用走行制御装置
【課題】ハイブリッド車両において、実際のエンジントルクの変動に伴うエンジン停止・始動のハンチングを抑える。
【解決手段】目標とする走行状態が予め設定したエンジン停止判定値以下の場合には、エンジンによる駆動輪の駆動を停止する。このとき、目標エンジントルクと実際のエンジントルクとの間の推定される偏差に基づき、上記エンジン停止判定値を補正する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 適切な走行シーンにおいて第1クラッチの学習補正を行うことが可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 第2クラッチをスリップ制御してモータを回転数制御しているときに、第1クラッチの締結・開放が行われる走行モードの遷移であっても、第1クラッチの締結・開放以外の要因でモータトルク変動が生じる場合には、第1クラッチの学習補正を禁止することとした。
(もっと読む)
車両の制御装置
【課題】摩擦係合要素状態のばらつきに拘らず、駆動源回転数の吹け上がりを抑制することができる車両の制御装置を提供する。
【解決手段】本発明の車両の制御装置は、駆動源制御手段(図11)により、駆動源(エンジン)1からの出力トルクを制御するトルク指令値を、伝達容量検出手段(CL1ストロークセンサ)16により検出された摩擦係合要素(第1クラッチ)4における伝達トルク容量を超えない値に設定する。
(もっと読む)
走行モード制御装置、ハイブリッド自動車、および走行モード制御方法、並びにプログラム
【課題】ハイブリッド自動車の運転感覚を運転者の好みに応じて適切に変更すること。
【解決手段】第1のシフトスケジュールが選択されたときは、電動機による走行時間がエンジンによる走行時間を上回るように制御して第1のシフトスケジュールを実行し、第2のシフトスケジュールが選択されたときには、エンジンによる走行時間が電動機による走行時間を下回らないように制御して第2のシフトスケジュールを実行する走行モード制御部を有するハイブリッド自動車を構成する。
(もっと読む)
車両の制振制御を行う駆動制御装置
【課題】 車両のピッチ・バウンス制振制御のための駆動出力制御を実行する車両の駆動制御装置に於いて、制振制御の実行による排気ガス再循環(EGR)制御の効果の悪化を抑制すること。
【解決手段】 本発明の駆動制御装置は、エンジンの駆動トルクを制御してピッチ・バウンス制振を行う制振制御部と、EGR制御部と、制振制御部により算出される制振制御のための補償成分により補償されたエンジンに対する要求駆動出力を表す制御指令の位相進み補償を行う位相進み補償部とを含み、エンジンの駆動出力を制振制御により補償された制御指令に基づいて制御し、EGR部が位相進み補償部により位相進み補償が為された制御指令に基づいて決定された排気ガス再還流量の目標値に基づいて排気ガス再還流量を制御する。
(もっと読む)
ハイブリッド車両の駆動制御装置
【課題】例えばEV走行からパラレルHV走行に切り替える際のエンジンの始動時にハイブリッド車両の走行能力が低下することを抑制する。
【解決手段】ハイブリッド車両の駆動制御装置は、ハイブリッド車両(1)の走行モードを、第2回転電機(MG2)のみから駆動軸(OUT)に駆動力を出力する第1走行モード(EV走行)から内燃機関(20)及び第2回転電機から駆動軸に駆動力を出力する第2走行モード(パラレルHV走行)に切り替える際、内燃機関を始動させるために第1回転電機(MG1)の動力によって内燃機関の回転数を増大させるときに、クラッチ(CR)を滑らせる制御手段を備える。
(もっと読む)
衝突回避装置
【課題】自車両と当該自車両周辺に検知された障害物との衝突が回避されて、自動制動システムによる自動ブレーキ制御を解除しようとする際に、運転者によるアクセル操作の意思を尊重しつつ、自車両と当該自車両周辺に検知された障害物との衝突が回避された直後に自車両が急発進しないようにする衝突回避装置を提供する。
【解決手段】本発明の衝突回避装置は、自車両周辺の障害物を検知し、当該障害物との衝突を回避する衝突回避システムを備えた衝突回避装置であって、自車両周辺の障害物を検知する障害物検知手段と、衝突回避システムによってブレーキを制御するブレーキ制御手段と、ブレーキ制御手段によって自車両のブレーキを制御した後、当該障害物との衝突を回避したか否かを判定する衝突回避判定手段と、当該障害物との衝突を回避したと判定された場合、予め設定された制限駆動力を超えてエンジン駆動力を上昇させないエンジン駆動力制御手段とを備える。
(もっと読む)
21 - 40 / 201
[ Back to top ]