
Fターム[3H001AD04]の内容
Fターム[3H001AD04]の下位に属するFターム
ステップモータ(パルスモータ) (5)
プログラム設定器 (3)
Fターム[3H001AD04]に分類される特許
1 - 20 / 42
ポジショナ
【課題】変位検出部(角度センサ)の電気部品の腐食損傷や回転軸の固着などを防止する。
【解決手段】角度センサ4が調節弁200に固定設置され、制御演算部1,電空変換部2および空気圧信号増幅器(パイロットリレー)3がケース5に収納されたポジショナ100において、角度センサ4からの電気信号を制御演算部1に導くケーブル6に、電空変換部2への空気圧Psを分岐して角度センサ4の検出部内へ導くエアチューブ62を設ける。これにより、角度センサ4の検出部内がエアパージされ、雨水や湿気などのない状態に保たれる。
(もっと読む)
ポジショナ

【課題】低周波のノイズの影響に強いポジショナを提供する。
【解決手段】入力ラインL1と出力ラインL2との間に能動負荷Zとして可変インピーダンス回路ZBを設ける。可変インピーダンス回路ZBは、直流の電流信号に対するインピーダンスが低く、交流の電流信号に対するインピーダンスが高いという特性を有し、ラインL1,L2間に接続された抵抗R1とR2とR3との直列回路と、ラインL1にそのコレクタが接続され、そのベースが抵抗R2とR3との接続点に接続されたトランジスタQ1と、トランジスタQ1のエミッタとラインL2との間に接続された抵抗R4と、抵抗R2とR3との接続点にその一端が接続されたコンデンサC1と、コンデンサC1の他端とラインL2との間に接続された抵抗R5と、抵抗R1とR2との接続点にその一端が接続されたコンデンサC2と、コンデンサC2の他端とラインL2との間に接続された抵抗R2とから構成されている。
(もっと読む)
液圧装置
【課題】液圧ポンプの応答性を高めつつ電磁弁の開閉頻度を抑制することができる液圧装置を提供する。
【解決手段】モータ400により駆動され両方向に回転可能なポンプ450と、ポンプ450によりピストンロッド220が駆動する油圧シリンダ200と、ヘッド側ポートHPの管路に介挿された電磁弁320と、ロッド側ポートRPの管路に介挿されたパイロットチェック弁380および電磁弁310の少なくとも一方と、ピストンロッド220の変位を検出する直線変位計250とを備える。
(もっと読む)
除振システム用二層三方弁
【課題】除振システム用二層三方弁において、自動高さ調整弁の特質を生かしながら、定盤の除振制御と傾斜制御を可能とすることである。
【解決手段】除振システム用二層三方弁78が適用される定盤除振システム220は、空気バネ22,23と、個別駆動装置112,113と、制御装置110とを備える。個別駆動装置112,113は、制御弁40と、リンクレバー機構24,25と、気体供給源32を含み、制御弁40は、制御スリーブ90と固定スリーブ91とスプール部80の二層三方弁78と、リンクレバー機構24,25と接続されて制御スリーブ90を駆動する回転・直進変換機構44と、スプール部80を駆動するスプールアクチュエータ120を含む。制御装置110は、定盤224の加速度に応じて、空気バネ駆動装置30の動作を制御して、定盤224をベース222に対して定盤224に任意の変位を与える機能を有する。
(もっと読む)
ポジショナ
【課題】バルブ開度制御の速応性と整定性の改善を両立する。
【解決手段】調節弁2の駆動部2aへの空気圧Poの微分値(圧力微分値)dPo/dtに定数Kmを乗じた値Km・dPo/dtを第2のフィードバック値とする。調節弁2からフィードバックされてくる実開度値Xpvの微分値(弁開度微分値)dXpv/dtに定数Knを乗じた値Kn・dXpv/dtを第3のフィードバック値とする。第2のフィードバック値Km・dPo/dtと第3のフィードバック値Kn・dXpv/dとの和をマイナー制御ループのフィードバック値FBとする。制御部11からの制御出力(メジャー制御ループの制御出力)MVからマイナー制御ループのフィードバック値FBを減算して補正制御出力MV’を求め、電空変換器12への制御出力とする。
(もっと読む)
ポジショナ
【課題】基本機能を犠牲にすることなく、確実に、調節弁の開度制御の速応性や整定性などの制御性を向上させる。
【解決手段】供給電流Iが取り得る電流の範囲を複数の電流範囲に区分し、この電流範囲の区分毎に基本機能回路部7が実施する調節弁2の開度制御の制御形態(単ループ制御、二重ループ制御など)を定めたテーブルTB1をメモリ5に格納しておく。CPU4は、供給電流Iの実際値を検出し、基本機能回路部7に振り向けることが可能な余剰電流があるか否かを判断する。この場合、4mAを超える供給電流を余剰電流とみなし、その余剰電流を基本機能回路部7に配分するように、電流調整部8へ指令を送る。また、供給電流Iの区分に応じ、テーブルTB1に定められている制御形態で開度制御を実施するように、基本機能回路部7に指示する。
(もっと読む)
電気・油圧リニアサーボ弁
【課題】ボイスコイル形リニアモータ自体を大形化することなく高応答性を維持しつつも推力を増大させ、以て大流量形の高速リニアサーボ弁を実現する。
【解決手段】弁スプール2を駆動する電磁リニアモータ装置として、弁スプール2の両端部にそれぞれボイスコイル形リニアモータ10A、10Bを装備した電気・油圧リニアサーボ弁。弁スプール2の両端部にはそれぞれのリニアモータの可動コイル15A、15Bが直結され、これらの可動コイル15A、15Bは弁スプール2と軸方向移動の往復について一体移動する。両方の可動コイル15A、15Bは、励磁によって生じる軸方向推力が弁スプール2に対して同一方向に加算的に作用するように制御アンプにより互いに同期して励磁される。
(もっと読む)
油圧装置の制御方法と油圧装置
【課題】条件の相違があっても押出加工を正確に制御できる押出加工装置の制御方法と押出加工装置を提供する。
【解決手段】ラムシリンダ16内の作動油を圧縮しながらこの圧縮分の圧力ロスを含めた作動油の圧力によりラム18の移動速度が律速される初期状態と、作動油の圧縮が完了した状態からラムシリンダ16内に供給したポンプ流量の大小に応じ所定の相関関係を維持しつつラム18の移動速度が律速される比例定常状態と、作動油の圧力が解放されてこの解放分の圧力がラムシリンダ16に供給した作動油の圧力に追加されてラム18の移動速度が律速される後期状態のいずれかの状態を把握し、初期状態において作動油が圧縮されてロスが生じる分を加えたポンプ流量に制御し、後期状態において作動油の圧縮分が解放されて圧力が上昇する分を差し引いたポンプ流量に制御しながらラム18を移動制御する。
(もっと読む)
フォークリフト
【課題】車体の地上高さや駆動輪の輪重等を簡単に調整できるようにする。
【解決手段】駆動輪10を上下に揺動するためのドライブシリンダ11と、補助輪20を上下に揺動するためのキャスタシリンダ21と、ドライブシリンダ11の第1室とキャスタシリンダ21の第1室とを接続する第1管路31と、ドライブシリンダ11の第2室とキャスタシリンダ21の第2室とを接続する第2管路32と、作動油ポンプ81と制御弁73,74,75との間を第1管路31に接続する第3管路91と、第3管路91を開閉する切換バルブ90とを備え、制御弁73,74,75は、アンロード状態のときに絞り回路が構成されるようになっており、センサー94の検出結果に基づいて、制御弁73,74,75がアンロード状態のときに、作動油ポンプ81を駆動して切換バルブ90を開く調整動作を行う。
(もっと読む)
駆動装置
【課題】測定装置に設けられたエアシリンダの内圧をより簡単に調整できるようにする。
【解決手段】エアシリンダ62には、被検物の形状を測定するプローブ26が固定されており、リニアアクチュエータによりエアシリンダ62の稼動部63を上下に移動させることで、プローブ26が移動する。また、稼動部63内部には、上部空間65と下部空間66とが設けられており、上部空間65への空気の注入量を調整することにより、稼動部63に対して上下方向に加わる力のバランスが調整される。上部空間65への空気の注入量は、稼動部63を移動させるリニアアクチュエータに供給される駆動電流の値に基づいて求められる。本発明は、形状測定装置に適用することができる。
(もっと読む)
フィードバック機構およびバルブポジショナ
【課題】部品相互の取付精度に影響されることがなく、フィードバックピンやフィードバックレバーの折れ曲り、破損等を防止する。
【解決手段】第1、第2の磁石保持部131b、131cを有する磁石保持部材131を駆動軸Aに設ける。第1、第2の磁石保持部131b、131cの対向面に第1、第2の永久磁石133、134を互いに異極どうしを対向させて固定し、これらの磁石間に第3の永久磁石135を備えたフィードバックレバー109を挿入する。第3の永久磁石135は、第1、第2の永久磁石133、134と同極どうしが互いに対向するよう設けられている。これにより、第1、第3の永久磁石133、135による斥力と、第2、第3の永久磁石134、135による斥力とが釣り合い状態を保つ位置にフィードバックレバー109を保持する。
(もっと読む)
フィードバック機構およびバルブポジショナ
【課題】フィードバックレバーの摩耗、折れ曲り、破損等を防止する。
【解決手段】回転弁の回転駆動軸に磁石保持部材125を備えた回動レバーを設ける。磁石保持部材125の互いに対向する第1、第2の磁石保持部125A、125Bの内面に第1、第2の永久磁石130、131を互いに異極どうしを対向させて固定する。ポジショナ110のフィードバックレバー122の先端部を第1、第2の永久磁石130、131間に挿入する。フィードバックレバー122は、先端部に第3の永久磁石132を備えその磁極が第1、第2の永久磁石130、131と同極どうしが対向するよう設けられている。フィードバックレバー122は、第1、第3の永久磁石130、132による斥力と、第2、第3の永久磁石131、132による斥力が釣り合い状態を保つ位置に保持される。
(もっと読む)
フィードバック機構およびバルブポジショナ
【課題】部品相互の取付精度に影響されることがなく、フィードバックピンやフィードバックレバーの折れ曲り、破損等を防止する。
【解決手段】第1、第2の磁石保持部131b、131cを有する磁石保持部材131を駆動軸Aに回動自在に設ける。第1、第2の磁石保持部131b、131cの対向面に第1、第2の永久磁石133、134を互いに異極どうしを対向させて固定し、これらの磁石間に第3の永久磁石135を備えたフィードバックレバー109を挿入する。第3の永久磁石135は、第1、第2の永久磁石133、134と同極どうしが互いに対向するよう設けられている。これにより、第1、第3の永久磁石133、135による斥力と、第2、第3の永久磁石134、135による斥力とが釣り合い状態を保つ位置にフィードバックレバー109を保持する。
(もっと読む)
2重制御アクチュエータ装置
【課題】2つのアクチュエータを個別に制御することで、変位伝達経路にガタツキ、摺動抵抗等があった場合にも、ガタツキ、摺動抵抗等の影響を受けることなく、アクチュエータの制御を行える様にした。
【解決手段】第1、第2アクチュエータ4,5と、第1、第2アクチュエータ4,5に設けられた第1、第2変位検出器8,9と、第1、第2アクチュエータ4,5に対してそれぞれ設けられた第1、第2サーボバルブ18,22と、第1、第2サーボバルブを個別に制御する第1、第2制御部19,23とが設けられ、第1、第2変位検出器8,9からの変位信号に基づき第1、第2制御部19,23がそれぞれ第1、第2サーボバルブ18,22を個別にフィードバック制御し、第1、第2制御部19,23間で同期制御を行う様構成した。
(もっと読む)
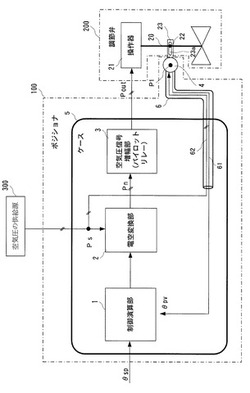
電動流体圧アクチュエータ装置
【課題】出力部の位置を保持するためのモータの電力消費を小さく抑えるという圧力補償機構の本来の機能を制限なしに利用することができながらも、構成の複雑化等を伴うことなく、モータの鉄損を抑制する。
【解決手段】ピストン15を有するシリンダ12と、斜板式の可変容量形のポンプ13とで閉じた流路を形成する。圧力P1とP2との差圧力が設定値Pc以上となったときに、差圧力に応じてポンプ13の容量を低下させる圧力補償機構20を設ける。制御装置19は、入力される位置指令信号と位置センサ16によるピストン15の位置検出信号とに基づいて、ポンプ13を駆動するサーボモータ14の回転数や回転方向等を制御する。このとき、ピストン15が目標位置近傍に位置している(目標位置までの移動距離全体の95%以上に至った)ときには、サーボモータ14の回転数を所定値以下に制限する。
(もっと読む)
デジタル液圧制御装置
本発明は、少なくとも2つのバルブ要素列であり、そのバルブ要素列の一方が供給ラインを制御装置出力に接続可能であり、そのバルブ要素列の他方が該制御装置出力を出口ラインに接続可能であるところの少なくとも2つのバルブ要素列を有するデジタル液圧制御装置に関する。その制御装置において、各バルブ要素列における複数のバルブ要素は、並列に接続され、個別に、或いは、互いに異なる組み合わせで同時に切り換え可能である。1つのバルブ要素列における複数のバルブ要素は、それぞれ異なる流れ断面を有する。本発明によると、最小流れ断面を有するバルブ要素は、バルブ要素列に2つ存在する。さらに、差動シリンダと4つのバルブ要素列を有するデジタル液圧制御装置とを含むシステムユニットが記載される。4つのバルブ要素列のうちの2つは、共通の制御装置出力で、差動シリンダの圧力室の一方に接続され、一方で、他の2つのバルブ要素列は、共通の制御装置出力で、その差動シリンダの圧力室の他方に接続される。2つの圧力室における圧力の独立した調節のおかげで、その差動シリンダは、正確に調節可能なリニアアクチュエータとして使用され得る。 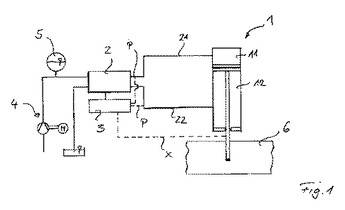 (もっと読む)
(もっと読む)
複動形空気圧シリンダの位置決め制御装置及びその制御方法
【課題】複動形空気圧シリンダの位置決め制御において、空気の圧縮性に起因するオーバーシュートやアンダーシュートを低減させ、簡単かつ安価な装置として構成する。
【解決手段】複動形シリンダの制御において、ピストン13の移動目標位置x3と減速開始位置x1が制御装置30に設定され、該制御装置における制御は、第1圧力室14の給気弁21及び第2圧力室15の排気弁24を開くことにより、ピストンを移動目標位置に向けて移動させている状態で、位置センサ17によりピストンが上記減速開始位置に達したことが検出されたときに、上記開状態にある排気弁24を閉じ、更に位置センサでピストンが移動目標位置に達したことが検出されたときに、開状態にある上記給気弁21を閉じ、両圧力室14,15に圧縮空気を封じてピストンをその圧力バランスにより移動目標位置に停止保持させるものとする。
(もっと読む)
アクチュエータのストローク制御装置
【課題】作動流体によって駆動されるアクチュエータストロークのフィードバック制御装置において、作動流体を制御する流量制御弁の経年変化等を補償し、簡易な手段によりストロークの正確な制御を実行する。
【解決手段】アクチュエータ110のストローク制御装置には、作動流体の供給及び排出を制御する単一の流量制御弁1が設置され、これを操作してストロークのフィードバック制御が実行される。流量制御弁1は、作動流体の供給及び排出を停止する中立位置を備えており、流量制御弁制御装置9には、この中立位置の変動を学習する学習装置91が設けられる。フィードバック制御においては、PID演算部94の出力するフィードバック操作量に、学習装置91で得られた中立位置の学習値を加算して流量制御弁1を操作し、経年変化等による流量特性の変化を補償する。
(もっと読む)
アクチュエータおよび制御方法
【課題】複動型シリンダを有するアクチュエータの動作を安定させる。
【解決手段】中空のシリンダと、シリンダに収容されて、シリンダと共に一対の圧力室を形成しつつ、シリンダに対して相対移動するピストンと、一対の圧力室の各々を、作動流体の圧力源または排出部に対して連通または遮断させる一対の制御弁と、シリンダに対するピストンの位置を検出する位置検出器と、一対の圧力室の各々における作動流体の圧力を個別に検出する一対の圧力検出器と、位置検出器が検出する位置が所与の目標位置に近づき、且つ、圧力検出器が検出する圧力の平均が所与の目標圧力に近づくように、制御弁を制御する制御部とを備える。
(もっと読む)
自動チューニング用の電気油圧弁
フロー制御弁は、流体入口、流体出口、第1作業ポート及び第2作業ポートを包含するハウジングを含む。ハウジングは、スプール孔及びパイロットスプール孔を形成する。主段階用スプールはスプール孔に配置される。パイロット段階用スプールは前記パイロットスプール孔に配置される。パイロット段階用スプールは、主段階用スプールと選択的に流体連通されている。マイクロプロッセサは、制限され構造化された制御器及び補償制御器を持つ制御器を含む。制限され構造化された制御器及び補償制御器の出力は合計され、パイロット段階用スプールに通信される電気信号を形成する。 (もっと読む)
1 - 20 / 42
[ Back to top ]