
Fターム[3H131BA15]の内容
非容積形送風機 (1,972) | 真空ポンプの構成の目的 (607) | センシング装置 (57)
Fターム[3H131BA15]に分類される特許
1 - 20 / 57
真空ポンプ
【課題】センサの取り付け位置調整をすることなく良好な計測信号を得ることが容易に可能な物理量計測装置、及び該物理量計測装置を備えた磁気浮上装置、真空ポンプを提供する。
【解決手段】コイルのインダクタンス変化によって振幅変調された高周波電圧に基づいて物理量を計測するセンサにおいて、コイルに被変調高周波電圧の周波数特性又は高周波電圧の周波数の可変手段を設けることによって、コイル又はそのコアの取り付け位置調整を必要とせずにセンサ感度の調整を可能にする。また、差動手段を設け、計測信号と調整可能な基準値信号の差を出力することにより、消費電力を低減し低飽和増幅器の採用を可能にする。更に、上記の調整手段を磁気軸受若しくは真空ポンプの機構部に配置することによって、機構部とコントローラの互換性を向上する。
(もっと読む)
磁気浮上式真空ポンプ、振れまわり推定方法、ロータバランス検査方法および磁気軸受制御ゲイン調整方法

【課題】高速回転状態での振れまわり測定を行うことなく、波形振幅値を用いて振れまわりを容易に推定することができる振れまわり推定方法の提供。
【解決手段】磁気浮上式真空ポンプの振れまわり推定方法は、ロータ30を目標浮上位置に磁気浮上させる磁気浮上工程と、目標浮上位置に磁気浮上しているロータ30を複数の回転位置に順に停止させ、各停止時における2対の電磁石の電流をそれぞれ計測する電流計測工程と、2対の電磁石の少なくとも一方の対に関して、対を成す電磁石の電流の差分を複数の回転位置の各々について算出する差分算出工程と、ロータ30が一回転する間の差分の変化の振幅値を算出する振幅値算出工程と、予め得られている振れまわり量と振幅値との相関関係および振幅値算出工程で算出された振幅値に基づいて、ロータ30の振れまわり量を推定する推定工程と、を有する。
(もっと読む)
磁気浮上式真空ポンプ
【課題】コストアップを抑えつつ、回転体が過熱判定温度を超えたことを検知することができる磁気浮上式真空ポンプの提供。
【解決手段】磁気浮上式真空ポンプでは、ロータ30とロータシャフト33とが一体化された回転体はモータ36により回転駆動され、その回転体はラジアル磁気軸受37およびスラスト磁気軸受38を備える磁気軸受装置によって所定位置に磁気浮上している。そして、真空ポンプは、回転体を構成するロータシャフト33に熱的に接触するように設けられ、回転体を構成するロータ30の過熱判定温度に対応したキュリー温度Tcを有する磁性体41と、磁性体41を吸引して回転体に対して軸方向の力を作用する永久磁石40と、スラスト磁気軸受38の励磁電流を検出する電流センサと、電流センサで検出される励磁電流Iの変化から、回転体を構成するロータ30の温度が過熱判定温度を超えたか否かを判定する判定回路と、を備えている。
(もっと読む)
ロータを有する真空ポンプ
【課題】不釣合い変化をコスト的に有利に修正可能な真空ポンプを提供する。
【解決手段】真空ポンプは、釣合い手段を含むロータ20と、ロータを回転させる駆動装置38、40と、ロータを支持するための軸受44、50と、ロータの釣合い状態を測定し、且つ、適合されている評価ユニット134と協働して釣合い状態の変化を検出するためのセンサ手段とを備え、ロータ位置を決定するために、ロータ位置検出ユニット132と協働する釣合い状態の変化に対処するために釣合い手段の調整が可能なように、ロータ位置に釣合い状態を割り当てるための割当て手段が設けられている。
(もっと読む)
回転シャフトの軸方向位置検出装置とそのターボ分子ポンプ用途
【課題】線形性を向上させ、かつ製造コストを減少させた回転機械の回転シャフトの軸方向位置の検出装置を提供する。
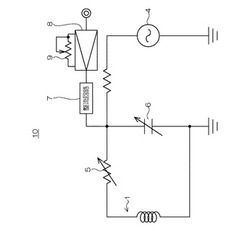
【解決手段】回転シャフト10の端部11に設置された強磁性材料のターゲット12と、エアギャップ60を残しつつ回転機械の構造に固定され、ターゲットと対向配置された固定磁気回路32に接続された誘導コイル31と、誘導コイルに給電するための給電回路とを含む装置であり、給電回路が、誘導コイルの第1端部と基準電圧(0V)に位置する領域との間に接続されたAC電源と、誘導コイルの第1端部と第2端部との間に接続された少なくとも1つのコンデンサと、第2端部と基準電圧に位置する領域との間に挿入された検出器デバイスとを、第2端部と基準電圧に位置する領域との間を流れる電流の大きさについての情報をライン上に供給するために有し、情報は、所定の公称値e0を有するエアギャップの幅の変更値xを表す装置である。
(もっと読む)
真空ポンプ
【課題】温度センサによる異常温度の検知に応答して直ちに真空ポンプのモータ駆動を零にしてしまうと、異常温度が生じた状況・原因に拘わりなく所謂フリーランの状態となってしまうという問題があった。
【解決手段】ターボ分子ポンプ1に内蔵されているモータ6の温度を検出するモータ温度センサ31と、複数のモータ温度に対応した重み値を記憶しておく記憶部86と、モータ温度センサ31により検出されたモータ温度に対応する重み値を記憶部86から1秒(または、所定の周期)毎に逐次読み出す温度制御部84と、温度制御部84から供給された重み値を累算する累積演算部88とを備えており、温度制御部84は、累積演算部88による累算結果に応じてアラーム発報を表す応答信号SG84を発する構成としてあるので、モータ温度の変化状況に応じてアラーム発報時刻を適切に可変制御することができる。
(もっと読む)
分子ポンプ装置の制御装置
【課題】 分子ポンプに取付けられている冷却ユニットが空冷式か水冷式かを自動的に判別すると共に、使用する制御パラメータを自動設定する機能を持ち、冷却ユニットの異常にも対応できる分子ポンプ装置の制御装置を提供する。
【解決手段】 分子ポンプ2と、該分子ポンプ2を制御する外部の制御装置1とからなる分子ポンプ装置の該制御装置1は、前記分子ポンプ2の冷却手段が空冷式か又は水冷式か或いは冷却手段が異常状態なのかを判別する判別手段21を具備している。
(もっと読む)
真空ポンプ
【課題】ロータの回転方向を検出することができる真空ポンプ。
【解決手段】モータ36により回転駆動されるロータ30に所定のキュリー温度を有する磁性体11を設け、ロータ30の回転に伴って、ロータ30の磁性体11が設けられた領域と磁性体11が設けられていない領域とに交互に対向するように温度センサ10を設ける。温度センサ回路43bからは、ロータ1回転当たりのパルス数が前記第1のパルス列信号と等しい第2のパルス列信号が温度センサ回路43bから出力される。また、ロータ30の回転と同期した第1のパルス信号を出力する回転センサ回路43aを設けた。温度センサ回路43bは、温度センサ10が磁性体11と対向しているときの第2のパルス信号の出力レベルの変化に基づいて、ロータ30の温度を推定する。そして、正逆判定回路44、第1のパルス信号のパルス発生パターンと第2のパルス信号のパルス発生パターンとに基づいてロータの回転方向を検出する。
(もっと読む)
真空ポンプ
【課題】ポンプ運転中にハイレベル信号およびローレベル信号の生成が不安定になるのを未然に防止することができる真空ポンプの提供。
【解決手段】真空ポンプは、ロータと一体に設けられたセンサターゲットと、そのターゲット面とのギャップ変化に応じたセンサ信号を出力するインダクタンス式の回転センサと、センサ信号の電圧レベルとHigh-Low判定用の閾値VL,VHとを比較して、凹凸段差に対応したローレベル信号およびハイレベル信号を生成する回転センサ回路とを備える。電源投入時に、ロータを複数の回転角度位置に順に停止させ、複数の角度位置の少なくとも一つにおいて、センサ信号の電圧レベル(VU〜VW)が判定閾値VL以下となり、かつ、他の角度位置の少なくとも一つにおいて、電圧レベル(VU〜VW)が判定閾値VH以上となる場合に、センサ信号は正常であると判定し、それ以外の場合には異常であると判定する。
(もっと読む)
ターボ分子ポンプ、その起動方法および真空処理システム
【課題】ポンプ内部の反応生成物の堆積を防止する。
【解決手段】ターボ用コントローラ50は、定格回転数のDCモータ42の電流値が所定の閾値を超えたか否かを判断する。閾値は、反応生成物がターボ分子ポンプ本体1に流入した際の、ターボ分子ポンプの負荷に対応しており、電流値と閾値との比較によって、反応生成物流入を常時監視し得る。反応生成物のターボ分子ポンプへの流入が開始すると、電流値は急激に上昇し、閾値を超える。内部温度がポンプ設定温度閾値以上であれば、反応生成物の堆積は生じることはないが、ポンプ設定温度閾値未満であれば堆積が生じる可能性がある。そこで、ターボ用コントローラは、定格回転数運転時に電流値が閾値以上となり、かつ内部温度が閾値未満のときに、インターロック動作を実行する。
(もっと読む)
真空ポンプ
【課題】アンバランス修正用部材により、ロータアンバランスの修正と、ロータ温度が許容温度を越えたか否かを判断することができる真空ポンプの提供。
【解決手段】外周面に排気作用部としての回転翼8が設けられた円筒状のロータ2を高速回転して、ガスを排気する真空ポンプにおいて、アンバランスを修正する修正用磁性部材としてのC型リング21は、ロータ2の許容温度に相当するキュリー温度を有する磁性材料で形成され、ロータ2の内周面に該ロータ2のアンバランスを修正するために付加される。C型リング21と対向する位置には、C型リング21の透磁率変化を検出するインダクタンス式のギャップセンサ44が配設されている。検出部31は、C型リング21の透磁率変化に基づいてロータ2の温度を監視する。
(もっと読む)
ターボ分子ポンプ
【課題】コスト上昇を抑えつつエレクトリカルランアウトを防止できるターボ分子ポンプの提供。
【解決手段】ターボ分子ポンプは、複数段の回転翼32が形成されたロータ30と、回転翼32に対して回転軸方向に交互に配置された複数段の固定翼22と、ロータ30が固定され、モータ36により回転駆動されるシャフト12と、シャフト12を磁気浮上させる磁気軸受37a,37b,38と、シャフト12の磁気浮上位置を検出する渦電流式ギャップセンサ27a,27b,28とを備え、ラジアルセンサ27a,27bの検出対象として非磁性金属から成るターゲット部材13,14と、スラストセンサ28の検出対象として非磁性金属で形成されたロータディスク15とが設けられている。なお、ターゲット部材13およびロータディスク15を、シャフト12に着脱可能に固定するようにしても良い。
(もっと読む)
真空ポンプ
【課題】効率的にステータを昇温させることができる真空ポンプの提供。
【解決手段】真空ポンプは、ロータ2の排気上流側に形成された複数段の回転翼8、および複数段の回転翼8に対して交互に配設された複数段の固定翼9とで構成されるターボポンプ部と、ロータ2の排気下流側に形成された円筒状ロータ部12、および円筒状ロータ部12の外周側に隙間を介して配置された円筒状のネジステータ11とで構成されるドラッグポンプ部と、を備える。そして、ネジステータ11に、ステータ加熱用のヒータ22が埋め込まれている。ネジステータ11はヒータ22により直接加熱されるので、ネジステータ11を効率的に昇温させることができる。
(もっと読む)
ターボ分子ポンプおよびそのメカニカルベアリングの寿命判定方法
【課題】メカニカルベアリングの寿命判定をより精度良く行うことができるターボ分子ポンプの提供。
【解決手段】ロータがボールベアリングにより回転自在に支持されたターボ分子ポンプにおいて、ベアリング状態データとしての起動時間カウント値およびモータ電流カウント値は、起動時間カウンタ201およびモータ電流積算カウンタにより積算され、演算・判定部200は、それらの積算値に基づいて判定基準データを生成する。また、演算・判定部200は、所定時間を経過した後のベアリング状態データ(起動時間カウント値およびモータ電流カウント値)に基づく寿命判定データを取得する。そして、演算・判定部200は、寿命判定データと判定基準データとに基づいて、ボールベアリングの交換が必要か否かを判定する。
(もっと読む)
ターボ分子ポンプおよび真空装置
【課題】電源ユニットの大型化を防止しつつ、装置側の漏電遮断器が動作するのを防止することができるターボ分子ポンプ。
【解決手段】回転翼を有して高速回転するロータを具備するポンプユニットと、ポンプユニットを駆動制御する電源ユニットと、ポンプユニットを加熱するヒータ41とを備えたターボ分子ポンプにおいて、外部電源60からヒータ41へ供給される電流とヒータ41から外部電源60に戻る電流との差分に基づいて、ヒータ41の漏電を検知し、差分が通電停止判定値以上になった場合に、外部電源60からの電力をヒータ41に供給する電力ライン上に設けられたリレー54を開いてヒータ41への通電を停止し、検知された漏電が真の漏電と判定されるとリレー54の開状態を維持し、偽の漏電と判定されるとリレー54を再び閉じてヒータ通電を行わせる。
(もっと読む)
回転体のアンバランス修正方法、アンバランス修正装置および真空ポンプ
【課題】回転体のアンバランス修正作業を効率良く行うことができるアンバランス修正方法の提供。
【解決手段】本発明によるアンバランス修正方法では、被膜材料を含む電極の一部を放電により溶融して回転体に堆積させ、回転体のアンバランスを修正するものであって、回転体の動的不釣り合いを測定するアンバランス測定工程(S10)と、測定された動的不釣り合いに基づいて放電時間および回転体に対する電極の移動範囲を制御して、被膜材料から成るアンバランス修正用被膜を回転体に形成する被膜形成工程(S40)と、を有する。
(もっと読む)
真空ポンプのロータの回転の故障を予測する方法および関連ポンプ装置
本発明は、以下のステップを備える、真空ポンプのロータの回転の故障を予測する方法に関する:
− 真空ポンプの機能信号の経時的な変化に関連するイベントシーケンスが記録されるステップ101と、
− 少なくとも1つのイベントシーケンス、およびその記録されたイベントシーケンス内の真空ポンプ挙動モデルの少なくとも1つの事前に確立された結合規則の発生原因の間で一致が探求されるステップであって、前記事前に確立された結合規則の発生原因がロータの回転の故障を含む、ステップ102と、
− その期間中にロータの回転の故障が真空ポンプ内で生じることになる時間予測ウィンドウが推定されるステップ103。
本発明はまた、以下を備えるポンプ装置に関する:
− 少なくとも1つのロータおよび1つのポンプ本体を備える真空ポンプ7であって、前記ロータが前記ポンプ7のモータによって前記ポンプ本体内で回転駆動される可能性をもつ、真空ポンプ7と、
− 前記ポンプ7の機能信号センサ9と、
− その期間中にロータの回転の故障が真空ポンプ7内で生じることになる時間予測ウィンドウを予測する手段10であって、前記機能信号センサ9によって提供される測定結果に基づいてその予測時間ウィンドウを計算する、予測の手段10。 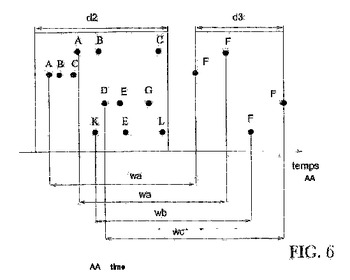 (もっと読む)
(もっと読む)
真空ポンプ
【課題】予め回転基準位置に対する磁性体位置の位相差を計測しておく必要がなく、ポンプ組み立て作業が簡素化される真空ポンプの提供。
【解決手段】インダクタンス検出部44は、少なくとも一つの磁性体102が設けられたインダクタンス被検出面に対向するように隙間を設けて配設され、インダクタンス信号を出力する。演算手段313は、基準位相信号発生手段が発生する基準位相信号を基準とする複数の回転位相に関するインダクタンス信号S1〜S3に基づいて、回転基準位置に対する磁性体102の位置(位相差)を算出する。温度推定手段314は、演算手段313で算出された磁性体102の位置に基づいて、インダクタンス検出部44が磁性体102に対向したときのインダクタンス信号を抽出し、該インダクタンス信号に基づいてロータの温度を推定する。
(もっと読む)
ターボ分子ポンプ駆動制御用電源装置
【課題】結露発生時にはターボ分子ポンプを自動的に停止させることができるターボ分子ポンプ駆動制御用電源装置の提供。
【解決手段】電源回路40は、電源電圧を複数の抵抗器401,402で分圧して帰還電圧を取り出し、その帰還電圧が所定の基準電圧V0と等しくなるように電源電圧を制御する。そして、電源電圧出力と帰還電圧の取り出し位置との間に、すなわち電源出力側の抵抗器401と並列に結露センサ44を設ける。結露センサ44は隙間dで配置された一対の電極441,442を備え、結露の発生によりその絶縁抵抗が低下する。その結果、電源電圧が基準電圧V0付近まで低下して電源回路40はシャットダウン状態となり、ターボ分子ポンプの運転は自動的に停止される。
(もっと読む)
真空ポンプ
【課題】ロータの磁極位置を正確に検出する。
【解決手段】DCブラシレスモータ6によってロータ2を回転させることによりガスを排気する真空ポンプであって、ロータ2と一体に回転する回転体42の軸方向端面には周方向に段部42bが形成され、この回転体42の軸方向端面に対向して配設されるとともに、所定の搬送波信号が印加され、回転体42の軸方向端面との間のギャップの変化に伴うインピーダンスの変化に応じて搬送波信号を振幅変調するセンサ部44と、センサ部44で振幅変調された変調波信号から包絡線を抽出して復調波信号を生成する復調生成手段45と、復調波生成手段で生成された復調波信号のうち、所定周波数以上の復調波信号を通過させるフィルタ手段47とを含み、フィルタ手段47を介して出力されたフィルタ信号に基づいてロータ3の磁極位置を検出する検出手段31と、検出手段31により検出された磁極位置に基づき、DCブラシレスモータ6を制御するモータ制御手段33とを備える。
(もっと読む)
1 - 20 / 57
[ Back to top ]