
Fターム[3J057GA21]の内容
油圧・電磁・流体クラッチ・流体継手 (17,432) | 制御の目的 (2,601) | 発進性の向上 (131)
Fターム[3J057GA21]の下位に属するFターム
Fターム[3J057GA21]に分類される特許
1 - 20 / 103
ハイブリッド電気自動車の制御装置
【課題】車両発進時の負荷が大きい場合にも不要な電力消費を排除し、バッテリのSOCの低下を抑制することのできるハイブリッド電気自動車の制御装置を提供すること。
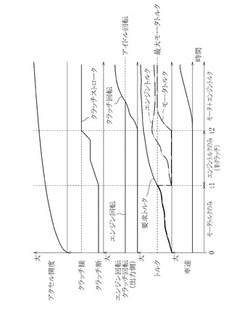
【解決手段】エンジン2とモータ4との間にクラッチ6が設けられたハイブリッド電気自動車の発進時において、統合ECU22は、要求トルクが最大モータトルクに達した場合には(t1)、モータトルクを0にするとともに、クラッチ6を接続していくことでエンジントルクを増加させ、車両が発進し始めた時点(t2)からモータトルクを復帰させる。
(もっと読む)
車両の動力伝達制御装置

【課題】AMTを搭載した車両において、発進制御中において加速操作部材の操作量が急激に減少された場合に発生し易い減速方向のショックの発生を抑制すること。
【解決手段】車両が発進する際、エンジントルクTeはアクセル開度に基づいて決定される値に調整される。クラッチトルクTcは、通常、エンジンの出力軸の回転速度Neと変速機の入力軸の回転速度Niとの差(ΔN=Ne−Ni)に基づいて決定される値に調整される(通常発進制御)。通常発進制御中において、アクセル開度の急激な減少が検出されたとき、Tcは、「回転速度差ΔNに基づいて決定される値」から(ΔNとは無関係に)減少させられる。これにより、アクセル開度の急激な減少後、Tcが直ちに減少し得る。従って、エンジンの出力軸に発生している減速トルクに基づく大きな減速トルクが駆動輪に伝達され得なくなり、減速方向のショックの発生が抑制される。
(もっと読む)
ハイブリッド車両の変速制御装置
【課題】各種変速状態においてクラッチアクチュエータ作動量の学習に適した変速状態を抽出し学習を行なうことによってクラッチアクチュエータ作動量の補正精度を向上させることが可能な変速制御装置を提供する。
【解決手段】対応関係補正手段は、エンジン回転数Neと自動変速装置の入力軸回転数Niとの差の絶対値|Ne−Ni|が所定値以上であることを判定する回転差判定手段と、変速時に変速作動が完了し、且つ差の絶対値|Ne−Ni|が所定値以上であることを条件とし、クラッチアクチュエータ作動量とクラッチトルクとの対応関係において、クラッチ制御手段によってクラッチアクチュエータに作動された目標クラッチトルクに対応するクラッチアクチュエータ作動量に対応するクラッチトルクの値を推定クラッチトルク演算手段によって演算された推定クラッチトルクTesに置き換えるクラッチトルク−作動量補正手段と、を有する。
(もっと読む)
車両の変速制御装置
【課題】製品毎のばらつきに基づくロッド作動量のばらつきを、簡易にかつ適切に学習し補正することが可能な変速制御装置を提供する。
【解決手段】エンジン11と、自動変速装置13と、目標クラッチトルクTrに制御するクラッチ30と、アクチュエータ61によって出力ロッド64をロッド作動量作動させるクラッチアクチュエータ17と、ロッド作動量Saに応じて油圧を発生させるマスタシリンダ65と、クラッチ30を切断および係合制御するスレーブシリンダ71と、クラッチトルク−作動量記憶手段51と、クラッチ制御手段52と、ロッド作動量検出手段67と、アクチュエータ電流検出手段28と、油圧発生時アクチュエータ電流Iocを検出し油圧発生時アクチュエータ電流Iocが検出された時に検出されたロッド作動量位置をクラッチトルクTcとクラッチアクチュエータのロッド作動量Saとの対応関係におけるクラッチ30の係合側の原点位置に置き換える原点位置補正手段53と、を有する。
(もっと読む)
車両発進状態推定装置
【課題】 簡単且つ低コストな構成でありながら、精度良く坂道発進などの車両発進状態を推定することができる車両発進状態推定装置を提供する。
【解決手段】 このため、本発明に係る車両発進状態推定装置は、エンジン側と駆動系側とを接断可能なクラッチ機構が介装された車両の発進状態を推定する車両発進状態推定装置であって、少なくとも車速と、エンジン回転速度と、エンジン負荷と、アクセルペダルの踏み込み量と、を含む車両の運転状態量に基づいて、車両の坂道発進状態を推定することを特徴とする。なお、車速が所定以下であり、アクセルペダルの踏み込み量が所定以上であり、エンジン回転速度が所定範囲にあり、エンジン負荷が所定以上であり、エンジン負荷の積分値が所定以上であることを条件として含み、これらが成立したときに、車両は発進補助が必要な坂道発進状態であると推定することができる。
(もっと読む)
車両制御装置
【課題】自動的にエンジンの運転を停止する制御から復帰するときの車両の応答性を向上できる車両制御装置を提供すること。
【解決手段】車両1の動力源としてのエンジン11と、エンジンと車両の駆動輪16との間に配置され、かつ係合度合いを制御可能なクラッチ3と、を備え、走行時にエンジンに対する燃料の供給を停止する所定制御を実行可能であり、所定制御の実行中にクラッチを係合状態とし、かつクラッチの係合度合いを制御する。係合度合いの制御において、クラッチは、例えば半係合状態とされる。
(もっと読む)
車両の制御装置
【課題】 クラッチの劣化を抑制しつつ、運転性を向上可能な車両の制御装置を提供すること。
【解決手段】 車両の駆動力を出力するモータと、前記モータと駆動輪との間に介装され指令油圧に基づいて伝達トルク容量を発生するクラッチと、前記クラッチをスリップ制御すると共に、前記クラッチのモータ側の回転数が前記クラッチの駆動輪側回転数よりも所定量高い回転数となるように前記モータを回転数制御する走行モードと、車両停止状態を判定する車両停止状態判定手段と、前記モータの実トルクを検出するトルク検出手段と、前記走行モード中に車両停止状態と判定されたときは、前記指令油圧を初期指令油圧から低下させて前記モータの実トルク変化に応じた補正後指令油圧を設定し、該補正後指令油圧を出力する前に前記補正後指令油圧よりも高いプリチャージ指令油圧を出力する車両停止時伝達トルク容量補正手段と、を備えた。
(もっと読む)
ハイブリッド車両のエンジン始動制御装置
【課題】運転者の加速意図に応じてエンジンの始動制御を行う。
【解決手段】エンジン1とモータ5とを駆動源として備え、エンジン1とモータ5とが伝達トルク容量を変更可能なクラッチ6を介して連結され、エンジン1を始動する際には前記クラッチ6を締結してモータ5の駆動力によりエンジン1のクランキングを実施する。運転者のアクセル操作の結果により停止中のエンジン1を始動する際に、運転者の加速意図が大きい場合には、運転者の加速意図が小さい場合に比べて、エンジン1のクランキング中の前記クラッチ6の伝達トルク容量を大きくする。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジン始動時、トルク変動がそのまま車輪に伝わることを防止しながら、発進クラッチの固着判定時間の短縮化を図ること。
【解決手段】ハイブリッド車両の制御装置は、エンジン1と、モータジェネレータ2と、第2クラッチ5(CL2)と、固着判定手段(図9)と、を備える。モータジェネレータ2は、エンジン1に連結される。第2クラッチ5(CL2)は、モータジェネレータ2とタイヤ7,7の間に介装され、エンジン始動時にスリップ締結される。固着判定手段(図9)は、モータジェネレータ2をスタータモータとするエンジン始動制御が開始されると、モータジェネレータ2に対する許容入力トルク指令とエンジン1に対する燃料噴射停止指令を出力し続け、第2クラッチ5(CL2)のスリップ量Sが固着判定閾値S1を超えないままで第2ターマー値TIM2以上経過すると、第2クラッチ5(CL2)が固着であると判定する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジン始動時における第2クラッチの締結防止によるショック低減と、バッテリの劣化防止と、の両立を図ること。
【解決手段】ハイブリッド車両の制御装置は、エンジン1と、モータジェネレータ2と、第1クラッチ4と、第2クラッチ5と、バッテリ電力制限拡大制御手段(図12)と、を備える。モータジェネレータ2は、バッテリ8からの電力により駆動する。第1クラッチ4は、エンジンとモータジェネレータ2の間に介装され、モータジェネレータ2をスタータモータとするエンジン始動時に締結される。第2クラッチ5は、モータジェネレータ2とタイヤ7,7の間に介装され、エンジン始動時にスリップ締結される。バッテリ電力制限拡大制御手段(図12)は、エンジン始動時、最もモータトルクが必要な状態を含むエンジン始動領域を検知すると、通常時のバッテリ電力制限を一時的に拡大する電力制限拡大要求を出す。
(もっと読む)
車両の動力伝達制御装置
【課題】AMTを搭載した車両において、登坂路上で車両が発進する際に発生し得る「後退期間」が比較的長くなる事態の発生を簡易な構成を用いて抑制すること。
【解決手段】発進時制御開始条件が成立すると(tA)、発進時制御が開始され、変速機の変速段が発進用の変速段(1速)に設定された状態で、エンジントルクTe及びクラッチトルクTcがそれぞれの所定のパターンに従ってフィードフォワード的に増大されていく。発進時制御開始後において検出される「変速機の入力軸の回転速度Ni」の推移に基づいて、車両が登坂路上にあるか否かが判定される。「車両が登坂路上にある」との判定がなされた場合(tB,tD)、その判定がなされた時点以降、エンジントルクTe、及びクラッチトルクTcが、前記所定のパターンに対してそれぞれΔTe,ΔTcだけ「かさ上げ」される。
(もっと読む)
摩擦係合要素の制御方法
【課題】 摩擦係合要素の応答特性の低下を抑制可能な摩擦係合要素の制御方法を提供する。
【解決手段】 エンジンEが一定の条件下で作動している状態で、リニアソレノイド弁LS3に供給する電流にディザを付加し且つ電流の値を変化させることで発進クラッチ5を開放状態から係合状態に移行させる。その移行中、エンジンEに発生する負荷を検出する。そして、発進クラッチ5が係合状態になることで負荷が変化したときの指令圧力値Pcをディザに応じて補正し、その補正値を次回の発進クラッチ5の係合を開始させるための初期圧力値PcIとして設定する。
(もっと読む)
車両の発進制御装置
【課題】変速機が手動変速機である車両において、発進時に、車両の円滑を発進を実現する。
【解決手段】車両発進時に、クラッチ102が開放されている状態でアクセルペダル2が踏み込まれ、アクセル開度が車両の発進時に必要なエンジン回転数が得られる所定のアクセル開度閾値以上になると、アクセルペダル2の踏力をベース踏力よりも所定量増加させる。これによって、運転者は、車両発進時に、発進時に必要なエンジン回転数が得られるアクセル開度でアクセルペダル2を一定に保持することが容易となり、クラッチ102を円滑に締結することが可能となり、ひいては車両の円滑な発進を容易に実現することができる。
(もっと読む)
ハイブリッド電気自動車の発進制御装置
【課題】走行用動力源の電動機を用いたエンジン自動始動後に発進変速段への切換操作に起因する遅れを生じることなく迅速に車両を発進できるハイブリッド電気自動車の発進制御装置を提供する。
【解決手段】停車状態からの車両発進時においてエンジン1が自動停止されているとき、第1歯車機構G1をニュートラル状態にすると共にアウタクラッチ21を接続して電動機2によりエンジン1を始動する一方、第2歯車機構G2を第3速に切り換えてインナクラッチ22を接続し、この第3速を介してエンジン1の駆動力で車両を発進させることにより、第1歯車機構G1をニュートラル状態から発進変速段である第2速に切り換えることによる遅れを防止する。
(もっと読む)
内燃機関の始動方法
【課題】 内燃機関の始動方法を提供する。
【解決手段】 始動装置を介してトランスミッションに連結され、且つ始動/停止動作モードで動作する自動車の内燃機関の始動方法において、液圧媒体が油圧ポンプによりバルブ装置を介して始動装置に送り込まれる。スタータによる内燃機関の始動前及び始動中、制御ユニットは、バルブ装置が液圧媒体を始動装置に供給することが可能なように前記バルブ装置を作動させる。制御ユニットは、内燃機関の始動中、油圧ポンプが液圧媒体を始動装置に直接供給するように前記油圧ポンプを作動させ、それにより始動装置による内燃機関とトランスミッションとの間の機械的に動作可能な連結が実現される。
(もっと読む)
自動クラッチの制御装置
【課題】車両状況によらずクラッチ係合時の衝撃の防止および車両の発進性を向上させることができる自動クラッチの制御装置を提供する。
【解決手段】アクセルが踏み込まれてエンジン回転数Neが上昇する前のアイドル回転数Nebを記憶し(ステップS15)、このアイドル回転数Nebとクラッチ係合期間中の最低エンジン回転数Neminとの差(Neb−Nemin)が補正判定しきい値以上である場合に(ステップS20でYESと判定)、クラッチディスクがフライホイールに接近する係合速度が切り替わる係合速度切り替え位置をクラッチ断側へ補正する(ステップS21)ので、相対的なエンジン回転数Neの変化で補正の判断を行うことができ、車両状況によらずクラッチ係合時の衝撃の防止および車両の発進性を向上させることができる。
(もっと読む)
車両の制御装置
【課題】ドライバに違和感を与えることなく車両の発進性能を向上させることが出来ることが出来るようにする。
【解決手段】車両10のエンジン11を自動停止/自動再始動させる自動停止再始動手段42と、ドライバによる加減速要求を検出する加減速要求検出手段32と、検出された加減速要求に応じたエンジン11の出力トルクを要求トルクTRQreqとして検出する要求トルク検出手段81と、エンジン11が自動再始動した場合は、検出された要求トルクTRQreqに応じて、エンジン11と変速機変速機構19との間に介装された自動クラッチ18の係合度合が変化する割合である係合スピードを設定する係合スピード設定手段83とを備えて構成する。
(もっと読む)
ハイブリッド車両のクラッチ制御装置
【課題】駆動源と駆動輪との間に介在されたクラッチのクラッチトルク特性が、低トルク容量側に変動しても、HEVモードにおける発進時の加速レスポンス悪化を防止でき、また、クラッチのクラッチトルク特性が、高トルク側に変動しても、EVモードにおける発進時の締結状態からスリップ状態に移行遅れを防止できるハイブリッド車両のクラッチ制御装置を提供すること。
【解決手段】HEVモードと、EVモードと、を形成可能な駆動機構100に設けられた油圧駆動のクラッチCL2に、電流−油圧特性に基づき電流指令値を与えて締結状態を制御する統合コントローラ14を備え、統合コントローラ14は、HEVモードで用いる電流−油圧特性であるHEVモードマップが、EVモードで用いる電流−油圧特性であるEVモードマップに対して、高く設定されていることを特徴とするハイブリッド車両のクラッチ制御装置とした。
(もっと読む)
車両用クリープ走行制御装置および車両用クリープ走行制御方法
【課題】路面の勾配を検出するためのセンサを用いずに、路面の勾配に応じて発進クラッチの締結を制御する。
【解決手段】エンジン1と変速機4との間に設けられる発進クラッチC1,C2を備えた車両のクリープ走行を制御する装置において、回転センサ6は、車輪8a,8bの回転方向および回転角速度を検出する。コントローラ10は、車輪8a,8bの回転方向および回転角速度に基づいて、車輪の回転角加速度を算出し、算出した回転角加速度に基づいて、発進クラッチC1,C2の締結容量、および発進クラッチC1,C2の締結を開始してから完了するまでの締結時間を算出する。そして、算出したクラッチ締結容量およびクラッチ締結時間に基づいて、発進クラッチC1,C2の締結を制御する。
(もっと読む)
車両のクラッチ制御装置
【課題】現回転数が発進許可回転数よりも高い場合であってもクラッチがスムーズにつながるようにして発進時の乗り心地を向上させる。
【解決手段】発進許可判定部10は、エンジン回転数NEおよびスロットル開度THが所定値以上になったときに発進許可をする。クラッチ・トルク容量記憶部11は、エンジン回転数NEおよびスロットル開度THのうち少なくともエンジン回転数NEの関数としてクラッチ・トルク容量を設定したクラッチ・トルク容量基準マップを格納している。クラッチ・トルク容量補正部12は、発進許可時のエンジン回転数NEと発進許可回転数NE0との差に応じて、クラッチ・トルク容量が比例縮小的に小さくなるようにクラッチ・トルク容量基準マップを補正する。油圧制御部13は、補正されたクラッチ・トルク容量マップに従って得られたクラッチ・トルク容量でクラッチ2をつないで車両を発進させる。
(もっと読む)
1 - 20 / 103
[ Back to top ]