
Fターム[3J057GB04]の内容
油圧・電磁・流体クラッチ・流体継手 (17,432) | 制御のための検出又は入力信号 (3,026) | 推進装置(エンジン) (824) | スロットル開度又は吸気管負圧 (80)
Fターム[3J057GB04]に分類される特許
1 - 20 / 80
車両制御システム及び制御装置
【課題】確実に内燃機関を始動することができる車両制御システム及び制御装置を提供することを目的とする。
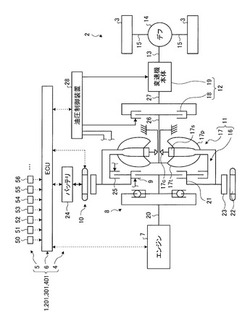
【解決手段】制御装置6は、内燃機関7、回転電機10、及び、クラッチ9を制御し、クラッチ9をスリップ状態とし回転電機10側からの動力により内燃機関7の出力軸20を回転させた後に内燃機関7の燃焼室71に燃料を噴射して点火し内燃機関7を始動する第1始動制御と、内燃機関7の出力軸71の回転が停止した状態で内燃機関7の燃焼室71に燃料を噴射して点火し出力軸20を回転させた後にクラッチ9を介した回転電機10側からの動力により出力軸20の回転をアシストし内燃機関を始動する第2始動制御とを実行可能である。そして、制御装置6は、内燃機関7が停止してからの経過時間に基づいて、第1始動制御と第2始動制御とを切り替えることを特徴とするので、確実に内燃機関7を始動することができる、という効果を奏する。
(もっと読む)
油圧クラッチの初期制御値学習装置および車両

【課題】 油圧クラッチのトルク点を吸気負圧に基づいて検出して該油圧クラッチの初期制御値を学習する際に、トルク点の誤検出による誤学習を防止する。
【解決手段】 油圧クラッチ28の油圧指令値を減少あるいは増加させる過程でのエンジンの吸気負圧の変動に基づいて、油圧クラッチ28の初期制御値を学習する。仮に、油圧クラッチ28がトルク点に達したことによるエンジンEの負荷の変化をエンジン回転数により検出すると、エンジンEや動力伝達経路の慣性の影響を受けて検出精度が低下するが、エンジンEの負荷の変化を吸気負圧PBにより検出することで検出精度が向上する。学習禁止手段は2階微分値算出手段が算出した吸気負圧の2階微分値に基づいて初期制御値学習手段による学習を禁止するので、エンジン単体の負荷の変動以外の要因で吸気負圧が変動した場合に誤った学習が行われるのを未然に防止することができる。
(もっと読む)
油圧クラッチの初期制御値学習装置
【課題】 油圧クラッチのトルク点の学習精度を高める。
【解決手段】 油圧クラッチ28への油圧指令値を減少させると、油圧クラッチ28が係合状態から係合解除状態へと移行する過程でトルク点に達したときにエンジンEが駆動輪Wから切り離され、エンジンEの負荷が減少して一定の値になることでエンジンEの吸気負圧が安定する。油圧クラッチ28がトルク点に達してエンジンEの吸気負圧が安定すると、そのときの吸気負圧に基づいて油圧クラッチ28がトルク点に達したときの油圧指令値である初期制御値を学習する。従来は油圧クラッチ28がトルク点に達したことをエンジン回転数の変化により検出していたため、エンジンEや動力伝達経路の慣性の影響を受けて検出精度が低下する問題があったが、本発明では油圧クラッチ28がトルク点に達したことを吸気負圧の変化により検出することで検出精度が向上する。
(もっと読む)
動力伝達装置の制御装置
【課題】 登坂路の傾斜角に依存せず、車両が登坂路でスムーズに発進することができる動力伝達装置の制御装置を提供する。
【解決手段】 本発明の動力伝達装置の制御装置は、加速度センサを用いて車両が停車した状態に相当する際の停車状態相当加速度を算出する加速度算出工程S1と、変速機から駆動輪に出力される駆動トルクと後退トルクとの合成トルクの大きさが制動機構が駆動輪を制動する制動トルクよりも小さくなるか、又は、駆動トルクと後退トルクとの合成トルクの向きが車両を前進させる方向に向いているか、若しくは合成トルクが0になるように、制動機構が発生する制動トルクを漸減させつつ、動力源が発生させるトルクの大きさ及びクラッチトルクにより決定される駆動力を制御する後退防止工程S2と、を備える工程で動力伝達装置を制御する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】ステアリング操作を伴う高負荷時、負荷判定タイミングの適正化により、遅れることなく第2締結要素保護走行モードへ移行すること。
【解決手段】ハイブリッド車両の制御装置は、エンジンEと、モータジェネレータMGと、第1クラッチCL1と、第2クラッチCL2と、路面勾配推定演算部201と、CL2保護走行制御部(図7のステップS10,ステップS12)と、閾値変更部(図7のステップS4)と、を備える。CL2保護走行制御部は、推定勾配が第2閾値g2を超えるとき、エンジンEを所定回転数で作動させたまま第1クラッチCL1を解放又はスリップ締結し、モータジェネレータMGを所定回転数よりも低い回転数として第2クラッチCL2をスリップ締結するCL2保護走行モードに制御する。閾値変更部は、CL2保護走行モードへ移行する第2閾値g2を、ステアリング操作が行われたことを検出した際に低下させる(図4)。
(もっと読む)
機械式自動変速装置の制御システム
【課題】本発明は、変速時のショックを低減することのできる機械式自動変速装置の制御システムを提供する。
【解決手段】エンジントルク算出部(31)にて、エンジン(10)の回転速度と吸入空気量と、燃料噴射量とに基づいてエンジントルクTegを算出する。また、回転変化量算出部(32)にて、回転速度変化量aegを算出する。そして、クラッチトルク算出部(33)にて、エンジントルクTegと回転速度変化量aegとエンジン慣性モーメントIegと式(1)に基づいて、クラッチトルクTclを算出する。次に、クラッチストローク算出部(34)にて、クラッチトルクTclとクラッチストロークSclとの関係を示すマップよりクラッチストロークSclを算出し、クラッチ操作部(25)をクラッチストロークSclとなるように作動させる。
(もっと読む)
制御装置
【課題】内燃機関の始動に伴う、切離用係合装置の直結移行後における内燃機関及び回転電機の回転速度のオーバーシュートの発生を効果的に抑制し得る制御装置を実現する。
【解決手段】内燃機関と車輪とを結ぶ動力伝達経路に、切離用係合装置、回転電機の順に設けられた車両用駆動装置の制御装置。内燃機関の停止状態で内燃機関始動要求があった場合に、切離用係合装置を介して伝達される回転電機のトルクにより内燃機関を始動させる始動制御部と、内燃機関が点火を開始した後に切離用係合装置をスリップ係合状態から直結係合状態へと移行させる係合制御部と、切離用係合装置の直結移行時を含む所定期間、要求駆動力に応じた内燃機関要求出力トルクに対して抑制されたトルクを内燃機関に出力させるトルク抑制指令を出力する抑制指令出力部と、を備える。
(もっと読む)
車両の制御装置
【課題】 クラッチ締結動作中において、運転者が意図しない機関出力制御が行われること、及び機関回転数の吹け上がりを適切に防止する。
【解決手段】 車両の発進時においてエンジン回転数NEが低下すると、クラッチ締結フィードバック制御が開始される。アクセルペダルが踏み込まれ、かつエンジン回転数NEが目標回転数NOBJ以下であるときは、フィードバック制御の比例項CLFBP、積分項CLFBI、及び微分項CLFBDが算出され、これらを加算することによりクラッチ締結フィードバック制御開度THCLFBが算出される。エンジン回転数NEが目標回転数NOBJを超えるとクラッチ締結フィードバック制御開度THCLFBが前回値THCLFBBに維持される。
(もっと読む)
車両発進状態推定装置
【課題】 簡単且つ低コストな構成でありながら、精度良く坂道発進などの車両発進状態を推定することができる車両発進状態推定装置を提供する。
【解決手段】 このため、本発明に係る車両発進状態推定装置は、エンジン側と駆動系側とを接断可能なクラッチ機構が介装された車両の発進状態を推定する車両発進状態推定装置であって、少なくとも車速と、エンジン回転速度と、エンジン負荷と、アクセルペダルの踏み込み量と、を含む車両の運転状態量に基づいて、車両の坂道発進状態を推定することを特徴とする。なお、車速が所定以下であり、アクセルペダルの踏み込み量が所定以上であり、エンジン回転速度が所定範囲にあり、エンジン負荷が所定以上であり、エンジン負荷の積分値が所定以上であることを条件として含み、これらが成立したときに、車両は発進補助が必要な坂道発進状態であると推定することができる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジン始動時のトルク抜けショックの影響を防止しつつ、エンジン始動完了までの時間を短縮すること。
【解決手段】ハイブリッド車両の制御装置は、エンジン1と、モータ2と、HEVモードとEVモードを切り替える第1クラッチ4と、モード遷移時にスリップ締結される第2クラッチ5と、エンジン始動制御手段(図10)と、を備える。エンジン始動制御手段(図10)は、エンジン始動要求時の第2クラッチ5の締結トルクである始動要求時トルクが、第2クラッチ5のトルク抜けによるショック非発生トルク以下のときには、始動要求時トルクが前記ショック非発生トルクよりも大きいときに比べて、モード遷移時の第2クラッチ5の締結トルクであるモード遷移時トルクを小さい値に設定する。
(もっと読む)
クラッチ制御装置
【課題】急ブレーキ時に自動クラッチを確実に切断状態としてエンストの発生を防ぐことが可能なクラッチ制御装置を提供する。
【解決手段】クラッチ制御装置は、アクチュエータによって接続状態と切断状態とを切り換え可能に構成され、接続状態のときにエンジン1と変速機3との間でトルクを伝達する自動クラッチ2を備え、自動クラッチ2のクラッチトルクが目標クラッチトルクに一致するようにフィードバック制御を行う。車両のアクセル開度θACを検出するアクセル開度センサ405と、クラッチトルクのフィードバック制御の積分項TcΔNEに対し上下限ガードを設定するガード手段とを備え、上限ガードおよび下限ガードの各ガード値は、アクセル開度θACが小さいほど、積分項TcΔNEを小さく制限するように設定される。
(もっと読む)
摩擦係合要素の制御方法
【課題】 摩擦係合要素の応答特性の低下を抑制可能な摩擦係合要素の制御方法を提供する。
【解決手段】 エンジンEが一定の条件下で作動している状態で、リニアソレノイド弁LS3に供給する電流にディザを付加し且つ電流の値を変化させることで発進クラッチ5を開放状態から係合状態に移行させる。その移行中、エンジンEに発生する負荷を検出する。そして、発進クラッチ5が係合状態になることで負荷が変化したときの指令圧力値Pcをディザに応じて補正し、その補正値を次回の発進クラッチ5の係合を開始させるための初期圧力値PcIとして設定する。
(もっと読む)
車両用クラッチ装置の制御装置
【課題】摩擦クラッチの開作動の応答性を向上させることができる車両用クラッチ装置の制御装置を提供する。
【解決手段】推力伝達ピストン50を出力ピストン48側へ移動させるが出力ピストン48を摩擦クラッチ18のダイヤフラムスプリング32側へ移動させないようにクラッチ油圧制御装置80を制御して、推力伝達ピストン50と出力ピストン48との間の隙間を詰める隙間詰め制御手段104を含むことから、クラッチシリンダ40の圧力室44内に負圧が発生してクラッチシリンダ40の出力ピストン48と推力伝達ピストン50との間に隙間が形成されても、摩擦クラッチ18の開作動が開始されるまでの間に上記隙間が詰められるか或いは小さくされるので、摩擦クラッチ18の開作動の応答性を向上させることができる。
(もっと読む)
惰行制御装置
【課題】クラッチペダル踏み込み中の惰行制御終了時に違和感がない惰行制御装置を提供する。
【解決手段】惰行制御判定マップ2へのプロット点が惰行制御可能領域内かつアクセルペダル操作速度が所定範囲内かつプロット点が惰行制御しきい線をアクセル開度減少方向に通過したときクラッチ断及びエンジン回転数低下の惰行制御を開始し、アクセルペダル操作速度が所定範囲外又はプロット点が惰行制御可能領域外で惰行制御を終了する惰行制御実行部3と、惰行制御実行部3によるクラッチ断制御時にクラッチペダルが踏み込まれている状態で惰行制御実行部3が惰行制御を終了するときクラッチ断制御を続行させ、クラッチペダルが開放されるときクラッチ接制御を行わせるペダル開放時クラッチ接制御部4とを備える。
(もっと読む)
ハイブリッド車両の発進制御装置及び方法
【課題】エンジンの動作に安定性が増し、ハイブリッド車両の運行に信頼性を確保することができる剛健な運転性を提供する。
【解決手段】本発明によるハイブリッド車両の発進制御方法は、発進加速要求に応じて要求トルク量を決定する過程S102、クラッチの結合状態を分析する過程S103、クラッチのスリップと判定されればクラッチスリップトルク量を演算する過程S108、クラッチスリップトルク量に応じたエンジントルク補償をエンジン制御器に要請する過程S109、エンジン制御器は、エンジントルク補償に応じて空気量及び点火時期フィードバック制御によってエンジン出力トルクを補償する過程S110を含む。
(もっと読む)
車両用ハイブリッド駆動装置
【課題】発進クラッチが遮断されたモータ駆動走行モードから充電制動走行モードへ移行した場合でも、効率良くバッテリーを充電できるとともに大きな制動力が得られるようにする。
【解決手段】発進クラッチ26が遮断されたモータ駆動走行モードでの走行中にブレーキペダルが踏込み操作された場合に、前輪側要求制動力に対応する必要発電トルクTyoukyuが第2モータジェネレータMG2の最大発電トルクTMG2max を超える時には、その発進クラッチ26を締結し、第1モータジェネレータMG1および第2モータジェネレータMG2を何れも発電制御して上記前輪側要求制動力を発生させるとともに、得られた電気エネルギーでバッテリー46を充電する。これにより、2つのモータジェネレータMG1およびMG2を有効に用いてバッテリー46を効率よく充電できるとともに、大きな制動力が得られるようになり、エネルギー効率が向上する。
(もっと読む)
駆動制御装置
【課題】ドライバビリティを悪化させることなく車両のエネルギ効率を改善することが可能な駆動制御装置を提供する。
【解決手段】内燃機関2と、内燃機関2から駆動輪24に至る動力伝達経路中に設けられて複数の変速比に切り替え可能な変速機10と、変速機10を介することなく駆動輪24に動力伝達可能に設けられたモータ・ジェネレータ3とを備え、複数の変速段に変速可能な車両の駆動装置1Aに適用される駆動制御装置において、ニュートラル位置N及び1速〜5速を含むシフトパターンを移動可能に設けたシフトレバー51を有するシフト操作装置50を備え、車両の走行中にアクセルペダル61の踏み込みが解除されたとき、シフトレバー51がニュートラル位置Nの場合にはモータ・ジェネレータ3による回生発電が禁止され、シフトレバー51がニュートラル位置N以外のシフト位置にある場合にはモータ・ジェネレータ3による回生発電が許可される。
(もっと読む)
車両用駆動制御装置
【課題】ハイブリッド車両において、モータ走行からエンジン走行に切り替える際、電動モータ17にトルクアップする余裕がない場合でも、当該切替時のトルクショックを抑制できるようにする。
【解決手段】停止したエンジン11の膨張行程にある気筒に供給された燃料を点火・燃焼させることによって該エンジン11を始動させる。電動モータ17が現在出力可能な最大トルクと現在の発生トルクと差である余裕トルクを演算する。余裕トルクが所定値よりも小さいときには、エンジン回転数が、車速及び変速比に応じた同期回転数より所定回転数以上に上昇したときに、エンジン11と車輪14とを動力が伝達されるように断続手段で締結とするとともに、電動モータ17のトルクダウン制御を実行する
(もっと読む)
作業車の変速制御装置
【課題】第1及び第2特性を一時的に変更する簡単な制御によって変速装置のクラッチ圧の圧力調整等に影響を及ぼし難い状態で変速操作時の変速ショックを効果的に緩和する。
【解決手段】エンジン制御手段に、トルクカーブG1に設定された第1特性M1と、トルクの変動に対するエンジン回転数の変動が第1特性M1よりも大きいトルクカーブG2に設定された第2特性M2とを備える。エンジン制御手段が、変速装置の変速操作時に、変速操作手段による変速指令に基づいて第1特性M1を一時的に第2特性M2に変更するエンジン特性変更制御を実行する。
(もっと読む)
制駆動力制御装置
【課題】制駆動力制御装置において、燃費の向上を可能とすると共にドライバビリティの向上を可能とする。
【解決手段】車両の駆動輪18を駆動回転可能なエンジン11と、このエンジン11から駆動輪18が受ける制動力を低減するクラッチ19と、ドライバにより制動操作を行うブレーキペダル33と、ブレーキペダル33の操作に応じて車両に制動力を作用させる油圧ブレーキ装置31と、ブレーキペダル33による制動操作量の低下度合を検出し、この制動操作量の低下度合が予め設定された閾値より小さいときにクラッチ19を作動するECU21とを設ける。
(もっと読む)
1 - 20 / 80
[ Back to top ]