
Fターム[3J057GB05]の内容
油圧・電磁・流体クラッチ・流体継手 (17,432) | 制御のための検出又は入力信号 (3,026) | 推進装置(エンジン) (824) | アクセルペダル又はレバーの操作量又は速さ (215)
Fターム[3J057GB05]に分類される特許
1 - 20 / 215
ハイブリッド電気自動車の制御装置
【課題】車両発進時の負荷が大きい場合にも不要な電力消費を排除し、バッテリのSOCの低下を抑制することのできるハイブリッド電気自動車の制御装置を提供すること。
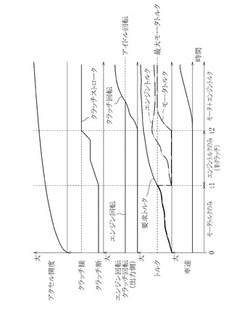
【解決手段】エンジン2とモータ4との間にクラッチ6が設けられたハイブリッド電気自動車の発進時において、統合ECU22は、要求トルクが最大モータトルクに達した場合には(t1)、モータトルクを0にするとともに、クラッチ6を接続していくことでエンジントルクを増加させ、車両が発進し始めた時点(t2)からモータトルクを復帰させる。
(もっと読む)
作業車両のクラッチ制御装置

【課題】作業車両の状態に対応したタイミングでクラッチを解放して、作業車両を滑らかに停止させる。
【解決手段】作業車両のクラッチ制御装置は、アクセルペダル12の踏み込みの有無を判定するアクセルペダル踏込判定手段10と、車速を検出する車速検出手段16と、制動力を検出する制動力検出手段33と、アクセルペダル踏込判定手段10によって判定されるアクセルペダル12の踏み込みの有無、車速検出手段16によって検出される作業車両の車速、および制動力検出手段33によって検出される作業車両の制動力に基づいて、クラッチカットオフ条件が成立しているか否かを判定する判定手段10と、判定手段10によりクラッチカットオフ条件が成立していると判定された場合に、クラッチ18,19を解放するようにクラッチ18,19の係合/解放を制御するクラッチ制御手段10とを備えることを特徴とする作業車両のクラッチ制御装置である。
(もっと読む)
車両制御システム及び制御装置
【課題】確実に内燃機関を始動することができる車両制御システム及び制御装置を提供することを目的とする。
【解決手段】制御装置6は、内燃機関7、回転電機10、及び、クラッチ9を制御し、クラッチ9をスリップ状態とし回転電機10側からの動力により内燃機関7の出力軸20を回転させた後に内燃機関7の燃焼室71に燃料を噴射して点火し内燃機関7を始動する第1始動制御と、内燃機関7の出力軸71の回転が停止した状態で内燃機関7の燃焼室71に燃料を噴射して点火し出力軸20を回転させた後にクラッチ9を介した回転電機10側からの動力により出力軸20の回転をアシストし内燃機関を始動する第2始動制御とを実行可能である。そして、制御装置6は、内燃機関7が停止してからの経過時間に基づいて、第1始動制御と第2始動制御とを切り替えることを特徴とするので、確実に内燃機関7を始動することができる、という効果を奏する。
(もっと読む)
車両の制御装置
【課題】エンジンを停止したモータ走行中であってエンジンを始動する際に、衝撃の発生を抑制してドライバビリティを向上できる車両の制御装置を提供する。
【解決手段】エンジンと、モータジェネレータと、エンジンおよびモータジェネレータを解放状態および係合状態に切り替えるとともに作動油中に配置されたクラッチとを備え、クラッチを係合状態にしてモータジェネレータによりエンジンを始動する車両の制御装置であって、クラッチの解放時間が長いほど、クラッチが次に係合状態に切り替わる際の係合速度を小さくする(ステップS4)。
(もっと読む)
自動クラッチ制御装置およびその変速制御方法
【課題】運転者がアクセルを踏込んだ速度に応じて設定される目標クラッチトルクでクラッチを制御することにより運転者の要求する加速の実現が可能である変速機の自動クラッチ制御装置およびその変速制御方法を提供する。
【解決手段】クラッチ40と、目標クラッチトルク演算部3aと、変速制御部3cと、アクセル踏込速度検出部2aと、原動機回転数検出部2cと、入力軸回転数検出部3dと、アクセル踏込速度Vacが1つ以上の所定の踏込速度閾値を超えるか否かを判定する踏込速度閾値判定部3eと、いずれかの踏込速度閾値を超えた場合に入力軸と原動機4とを切離後、成立された低速ギヤ段によって増加している入力軸回転数に一致させるよう原動機回転数Neを増加制御する原動機回転数増加制御部3fと、目標クラッチトルクTcaをアクセル踏込速度Vacの大きさに応じて変更演算する目標クラッチトルク変更演算部3gと、を備える。
(もっと読む)
車両の動力伝達制御装置
【課題】AMTを搭載した車両において、発進制御中において加速操作部材の操作量が急激に減少された場合に発生し易い減速方向のショックの発生を抑制すること。
【解決手段】車両が発進する際、エンジントルクTeはアクセル開度に基づいて決定される値に調整される。クラッチトルクTcは、通常、エンジンの出力軸の回転速度Neと変速機の入力軸の回転速度Niとの差(ΔN=Ne−Ni)に基づいて決定される値に調整される(通常発進制御)。通常発進制御中において、アクセル開度の急激な減少が検出されたとき、Tcは、「回転速度差ΔNに基づいて決定される値」から(ΔNとは無関係に)減少させられる。これにより、アクセル開度の急激な減少後、Tcが直ちに減少し得る。従って、エンジンの出力軸に発生している減速トルクに基づく大きな減速トルクが駆動輪に伝達され得なくなり、減速方向のショックの発生が抑制される。
(もっと読む)
動力伝達装置の制御装置
【課題】 登坂路の傾斜角に依存せず、車両が登坂路でスムーズに発進することができる動力伝達装置の制御装置を提供する。
【解決手段】 本発明の動力伝達装置の制御装置は、加速度センサを用いて車両が停車した状態に相当する際の停車状態相当加速度を算出する加速度算出工程S1と、変速機から駆動輪に出力される駆動トルクと後退トルクとの合成トルクの大きさが制動機構が駆動輪を制動する制動トルクよりも小さくなるか、又は、駆動トルクと後退トルクとの合成トルクの向きが車両を前進させる方向に向いているか、若しくは合成トルクが0になるように、制動機構が発生する制動トルクを漸減させつつ、動力源が発生させるトルクの大きさ及びクラッチトルクにより決定される駆動力を制御する後退防止工程S2と、を備える工程で動力伝達装置を制御する。
(もっと読む)
車両用クラッチ制御装置
【課題】クラッチの温度を考慮することでクラッチ伝達特性を適正に補正するようにした車両用クラッチ制御装置を提供する。
【解決手段】アクセルペダルの開度が所定開度以下で車速が所定車速以上の減速状態にあるか否か判定し(S200,S202)、減速状態にあると判定されるとき、アクチュエータを介してクラッチを開放方向に駆動してスリップさせるクラッチスリップ制御を実行し(S206からS214)、クラッチスリップ制御が実行されている間にエンジンの回転数NEと変速機の入力軸の回転数NMの差が所定値以上になったとき、クラッチが開放されたと判断してそのときのアクチュエータの駆動位置をクラッチ切れ点として検出し(S216)、検出されたクラッチ切れ点に基づいてクラッチ容量特性を補正する。
(もっと読む)
制御装置
【課題】内燃機関の始動に伴う、切離用係合装置の直結移行後における内燃機関及び回転電機の回転速度のオーバーシュートの発生を効果的に抑制し得る制御装置を実現する。
【解決手段】内燃機関と車輪とを結ぶ動力伝達経路に、切離用係合装置、回転電機の順に設けられた車両用駆動装置の制御装置。内燃機関の停止状態で内燃機関始動要求があった場合に、切離用係合装置を介して伝達される回転電機のトルクにより内燃機関を始動させる始動制御部と、内燃機関が点火を開始した後に切離用係合装置をスリップ係合状態から直結係合状態へと移行させる係合制御部と、切離用係合装置の直結移行時を含む所定期間、要求駆動力に応じた内燃機関要求出力トルクに対して抑制されたトルクを内燃機関に出力させるトルク抑制指令を出力する抑制指令出力部と、を備える。
(もっと読む)
車両制御装置
【課題】車両制御装置において、駆動源の停止時における振動の発生を抑制することでドライバビリティを向上する。
【解決手段】車両10に搭載されたエンジン11にトルクコンバータ12及び動力伝達クラッチ13を介して変速機14を連結し、この変速機14に減速・差動機構15を介して駆動輪16を連結し、エンジン停止許可条件が成立したかどうかを判定するエンジン停止判断部66と、エンジン停止許可条件が成立したときにエンジン11を自動停止可能なエンジン制御部(自動停止手段)67と、エンジン制御部67によりエンジン11を自動停止する前に変速機14の振動を考慮して動力伝達クラッチ13を開放するクラッチ制御部(クラッチ開放手段)68を設ける。
(もっと読む)
車両の走行制御装置
【課題】惰性走行を実施する頻度を増やし燃費を向上させることができるようにした車両の走行制御装置を提供する。
【解決手段】
エンジン1と、エンジン1と駆動輪7の間に介装された動力断接手段2と、惰性走行開始条件が成立したら動力断接手段2を動力遮断状態に制御し惰性走行を開始する惰性走行制御手段130とを備え、惰性走行開始条件には、車両の走行路が下り坂又は所定条件を満たす上り坂であることが含まれ、惰性走行制御手段130は、車両の前方に上り坂の頂上があるか否かを判定する頂上判定手段124と頂上判定手段124により頂上があることが判定されると車両が惰性走行を開始した場合の車両の走行速度の変化を推定して惰性走行によって車両が頂上に到達した際の走行速度Vが下限速度Vlow以上となることを所定条件として惰性走行の開始を判定する惰性走行開始判定手段125とを有する。
(もっと読む)
車両制御装置
【課題】クラッチの学習において学習するトルクに偏りが生じることを抑制できる車両制御装置を提供すること。
【解決手段】制御可能なクラッチを介して車両の駆動輪と接続された第一動力源と、クラッチを介さずに駆動輪と接続された第二動力源と、を備え、第一動力源の出力トルクを学習対象のトルクまで増減させ、かつ当該増減させた分のトルクを打ち消すトルクを第二動力源に出力させて(S1,S2)、学習対象のトルクについてクラッチの学習を行う(S5〜S7)。
(もっと読む)
車両用学習制御装置
【課題】学習機会の損失を低減することができる車両用学習制御装置を提供すること。
【解決手段】車両用学習制御装置は、クラッチ5と、クラッチ5を介して車両の車輪と接続されたエンジン1と、クラッチ5よりも車輪側に接続されたモータジェネレータ3と、モータジェネレータ3と電力を授受できるバッテリ4と、を有する駆動系と、モータジェネレータ3に動力を出力させて駆動系に関しての学習を行う制御部と、を備える。制御部は、モータジェネレータ3に発電を行わせることが可能な場合、モータジェネレータ3に発電させた電力でバッテリ4を充電した後で学習を行う。
(もっと読む)
車両用駆動装置
【課題】エンジン再始動に伴う前進クラッチの締結ショックを抑制しつつ、エンジン停止時においてもニュートラル制御を可能とする。
【解決手段】エンジン11と駆動輪19f,19rとの間の動力伝達径路18には、前進時に締結される前進クラッチ48が設けられる。この前進クラッチ48の締結油室63にはバネ部材65が組み込まれ、制御油圧が低下するアイドリングストップ時にも前進クラッチ48はバネ力によって滑り状態または締結状態に保持される。これにより、エンジン再始動に伴う前進クラッチ48の締結ショックを抑制することが可能となる。さらに、動力伝達径路18には電動アクチュエータ44に駆動される入力クラッチ15が設けられる。これにより、滑り状態または締結状態に保持される前進クラッチ48を備えていても、入力クラッチ15を解放することでニュートラル制御が可能となる。
(もっと読む)
車輪駆動装置
【課題】空走状態における電力消費を低減できるようにした車輪駆動装置を提供する。
【解決手段】電動モータ11と、電動モータの回転を減速し、トルク増大して駆動車輪12に伝達する遊星ギヤ機構13と、遊星ギヤ機構のリングギヤ22の回転を自由状態または固定状態にするクラッチ機構14と、通常はリングギヤを固定状態に保持し、車両の空走時を検出してリングギヤの回転を自由状態にするようにクラッチ機構を制御するクラッチ制御手段40とを有する。クラッチ制御手段は、例えば、電動モータによって駆動される電動モータ冷却用ポンプより吐出される冷却オイルの圧力、あるいは電動モータとは別に設けたモータによって駆動されるねじ機構によって駆動される。
(もっと読む)
車両制御装置
【課題】車両を惰性走行させるときのドライバビリティの低下抑制とクラッチの保護とを両立することができる車両制御装置を提供すること。
【解決手段】エンジンと、エンジンと車両の駆動輪とを接続し、かつ係合度合いを制御可能なクラッチと、を備え、クラッチを開放して車両を惰性走行させること(S2)が可能であり、降坂路において車両を惰性走行させる(S3−Y)場合、クラッチを開放することに代えて、クラッチを係合させてクラッチの係合度合いを制御する係合制御(S4,S5)を実行し、かつクラッチの発熱量に基づいて係合制御を禁止(S7)する。
(もっと読む)
自動車のオーバーランモードを制御する方法
【課題】 自動車のオーバーランモードを制御する方法を提供する。
【解決手段】 本発明は、自動クラッチを備えた内燃機関を有する自動車のオーバーランモードを制御する方法に関し、その方法において、オーバーランモードが存在する場合では、エンジン回転数(n)がオーバーランカットオフしきい値(nSch)よりも高い場合に、抵抗トルクを駆動トルクとして発生させるために、オーバーランカットオフを実行する。本発明によれば、制動要求がある場合に、エンジン回転数(n)の影響を評価し、さらに、予測されるエンジン回転数または現在のエンジン回転数とオーバーランカットオフしきい値(nSch)との間の比較を行い、予測される、または現在のエンジン回転数が、オーバーランカットオフしきい値(nSch)よりも高い場合にのみ、内燃機関をオーバーランモードに調整するか、またはオーバーランモードを維持することが提供される。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジン始動時のショックの発生等を抑制可能なハイブリッド車両の制御装置を提供する。
【解決手段】ハイブリッド車両の制御装置は、ハイブリッド車両に搭載され、エンジンと、第1回転電機と、第2回転電機と、動力伝達機構と、制御手段と、を備える。動力伝達機構は、相互に差動回転可能な複数の回転要素を備える。制御手段は、第1走行モードから、第2走行モードへ走行モードを切り替える際、クラッチを、滑らせながら係合状態にする。そして、制御手段は、要求駆動力に応じてクラッチの滑り量を変更する。
(もっと読む)
自動クラッチ制御装置
【課題】運転者の予期しない加速度が車両に発生することを抑制する。
【解決手段】ECU100は、クラッチストロークを変更することによって接続状態と切断状態とを切り換え可能に構成され、接続状態のときにエンジン1と変速機3との間でトルクを伝達する自動クラッチ2を制御する。また、ECU100は、エンジントルクTeを推定するエンジントルク推定部103と、エンジントルク推定部103によって推定されたエンジントルクTeの絶対値を、予め設定された補正トルクΔTeの値だけ増加することによって、クラッチトルクの第1指示値Tc1を求めるクラッチトルク算出部104と、を備える。更に、クラッチトルク算出部104は、フューエルカット状態ではない場合には、フューエルカット状態である場合と比較して、相違する補正トルクΔTeの値を用いてクラッチトルクの第1指示値Tc1を求める。
(もっと読む)
車両の制御装置
【課題】 クラッチの劣化を抑制しつつ、運転性を向上可能な車両の制御装置を提供すること。
【解決手段】 車両の駆動力を出力するモータと、前記モータと駆動輪との間に介装され指令油圧に基づいて伝達トルク容量を発生するクラッチと、前記クラッチをスリップ制御すると共に、前記クラッチのモータ側の回転数が前記クラッチの駆動輪側の回転数よりも所定量高い回転数となるように前記モータを回転数制御する走行モードと、車両停止状態を判定する車両停止状態判定手段と、前記モータの実トルクを検出するトルク検出手段と、車両停止状態と判定されたときは、前記指令油圧を初期指令油圧から前記モータの実トルクが変化しなくなる油圧である終了指令油圧まで低下させた後、前記初期指令油圧以下であって、かつ、前記終了指令油圧より高い補正後指令油圧に設定する車両停止時伝達トルク容量補正手段と、を備えた。
(もっと読む)
1 - 20 / 215
[ Back to top ]