
Fターム[3J057GB29]の内容
油圧・電磁・流体クラッチ・流体継手 (17,432) | 制御のための検出又は入力信号 (3,026) | ブレーキ (135)
Fターム[3J057GB29]の下位に属するFターム
パーキングブレーキ又はフットブレーキ操作 (62)
Fターム[3J057GB29]に分類される特許
1 - 20 / 73
ハイブリッド車両の制御装置
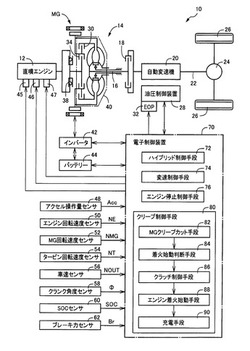
【課題】LUクラッチおよびC1クラッチが接続状態に維持されるMGクリープカット中に、K0クラッチを接続して直噴エンジンを適切に始動できるようにする。
【解決手段】MGでクリープトルクを発生させるMGクリープモード時にブレーキ操作されると、LUクラッチ30およびC1クラッチ18を接続したままMGトルクを0とするMGクリープカットが行われるため、発進時の応答性を確保しつつバッテリー44の消耗が抑制される。MGクリープカット中にエンジン始動要求があると、LUクラッチ30を解放するとともにC1クラッチ18の係合トルクを低下させ、K0クラッチ34を係合させて、直噴エンジン12を着火始動する際にMGでアシストするため、直噴エンジン12を確実に且つ速やかに始動できる。また、着火始動で自力回転しようとするため、MGのアシストトルクが小さくて済み、バッテリー44の過放電による劣化が抑制される。
(もっと読む)
ハイブリッド車両の制御装置

【課題】エンジン始動時のトルク抜けショックの影響を防止しつつ、エンジン始動完了までの時間を短縮すること。
【解決手段】ハイブリッド車両の制御装置は、エンジン1と、モータ2と、HEVモードとEVモードを切り替える第1クラッチ4と、モード遷移時にスリップ締結される第2クラッチ5と、エンジン始動制御手段(図10)と、を備える。エンジン始動制御手段(図10)は、エンジン始動要求時の第2クラッチ5の締結トルクである始動要求時トルクが、第2クラッチ5のトルク抜けによるショック非発生トルク以下のときには、始動要求時トルクが前記ショック非発生トルクよりも大きいときに比べて、モード遷移時の第2クラッチ5の締結トルクであるモード遷移時トルクを小さい値に設定する。
(もっと読む)
自動車のオーバーランモードを制御する方法
【課題】 自動車のオーバーランモードを制御する方法を提供する。
【解決手段】 本発明は、自動クラッチを備えた内燃機関を有する自動車のオーバーランモードを制御する方法に関し、その方法において、オーバーランモードが存在する場合では、エンジン回転数(n)がオーバーランカットオフしきい値(nSch)よりも高い場合に、抵抗トルクを駆動トルクとして発生させるために、オーバーランカットオフを実行する。本発明によれば、制動要求がある場合に、エンジン回転数(n)の影響を評価し、さらに、予測されるエンジン回転数または現在のエンジン回転数とオーバーランカットオフしきい値(nSch)との間の比較を行い、予測される、または現在のエンジン回転数が、オーバーランカットオフしきい値(nSch)よりも高い場合にのみ、内燃機関をオーバーランモードに調整するか、またはオーバーランモードを維持することが提供される。
(もっと読む)
機械式自動変速機のクラッチ切断制御機構
【課題】通常走行時と停車間際の低速走行時の双方において、最適なタイミングでクラッチ切断制御を行なうことが出来る機械式自動変速機のクラッチ切断制御機構の提供。
【解決手段】車速計測装置(3及び6、或いは4)と、ブレーキ操作速度計測装置(8)と、クラッチ作動装置(9)と、制御装置(10)とを備え、制御装置(10)は、車速(X)が第1のしきい値(A)以上である場合には、ブレーキ操作速度が第2のしきい値(B)以上である場合にクラッチ作動装置(9)に対してクラッチを切断する制御信号を発生する機能と、車速(X)が第1のしきい値(A)よりも低速である場合には、ブレーキ操作速度が第3のしきい値(C)以上である場合にクラッチ作動装置(9)に対してクラッチを切断する制御信号を発生する機能を有している。
(もっと読む)
車両の制御装置
【課題】クラッチの耐久性を向上可能な車両の制御装置を提供すること。
【解決手段】アクセルヒルホールド時に、クラッチを開放し、ブレーキ制御手段によって車両停止状態を維持する締結要素保護制御を、アクセルペダル開度に基いて設定された要求トルクが勾配負荷トルク相当値に基づいて設定された上限トルクと下限トルクの範囲内か否かで判断し、要求トルクが上限トルクと下限トルクの範囲外となったときは、締結要素保護制御を解除する。
(もっと読む)
車両の制御装置
【課題】 クラッチの耐久性を向上しつつ運転性を確保可能な車両の制御装置を提供すること。
【解決手段】 アクセルヒルホールドと判定され、かつ、勾配路に応じた所定時間が経過したときは、ブレーキ制御手段を用いて車輪に機械的制動トルクを付与すると共に、クラッチの締結トルクを低下させる締結要素保護制御を実施することとした。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 車両負荷が大きいときに第2クラッチの過剰な発熱を抑制可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 エンジンとモータの間に第1クラッチを有し、モータと駆動輪の間に第2クラッチを有するハイブリッド車両において、車両負荷が所定値以上のときは、エンジンを作動させた状態で第1クラッチを解放し、モータをエンジン回転数よりも低い回転数として第2クラッチをスリップ締結することとした。
(もっと読む)
車両のクリープトルク制御装置
【課題】車両に作用する制動力に応じて的確に且つ応答性よくクリープトルクを制御でき、もって燃料消費の低減やクラッチの消耗抑制を十分に達成できる車両のクリープトルク制御装置を提供する。
【解決手段】クラッチ回転速度Ncの増加に伴って目標クリープトルクを低下させ、且つブレーキ液圧の増加に伴って目標クリープトルクを低下させる通常時クリープトルク特性A〜Dをマップとして予め記憶させる。そして、このマップに基づきクラッチ回転速度Nc及びブレーキ液圧から目標クリープトルクを算出することで、クラッチ回転速度Ncやブレーキ液圧が変化したときに直ちに目標クリープトルクを増減させてクラッチの半クラッチ制御に反映させる。
(もっと読む)
車両の制御装置
【課題】 走行中の車両において惰行による走行時間や走行距離を長く確保できる車両の制御装置を提供すること。
【解決手段】 車両の制御装置は、車両の車速Vが下限側車速V0および上限側車速V1で決定される車速域内にあるとき、車速Vが車速V0以上であればフューエルカットによりエンジンを停止させてクラッチを開放して惰行により車両を走行させ、車速Vが車速V0を下回ると燃料供給によりエンジンを始動させてクラッチを係合して加速させる(定速フリーラン)。車両を停止させる必要があるときは、車両が停止するまでフューエルカットによりエンジンを停止させてクラッチを開放して惰行により車両を走行させた後(停止フリーラン)、クラッチを係合してエンジンブレーキおよびブレーキ装置による制動を付与する。これにより、惰行による走行時間や走行距離を長く確保できて燃費を向上させることができる。
(もっと読む)
係合機構の制御装置及びそれを備えた車両の駆動装置
【課題】機械要素の部品点数の増加を抑えつつ、カム部材の接触に伴う衝撃を緩和できる係合機構の制御装置及びそれを備えた車両の駆動装置を提供する。
【解決手段】制御装置45は、互いに相対回転可能な状態で組み合わされた第1カム部材35及び第2カム部材36を有する機構部31と、第2カム部材36を軸線Ax方向に移動させることにより相対回転を促す駆動部32と、カム部材35、36間の相対回転を抑えるリターンスプリング40とを備えた係合機構30に適用される。制御装置45は、係合機構30が解放状態において、リターンスプリング40の弾性力に逆らってカム部材35、36間に相対回転が生じ得る角加速度が第1カム部材35へ入力されることを予測し、その入力を予測した場合に、第2カム部材36が摩擦部41に接触するように駆動部32を制御する。
(もっと読む)
車両の制動制御装置
【課題】 制動装置に故障が生じたときに、ドライバが制動装置の故障を認識していない場合であっても、車両が動き出すことを防止することができる制動制御装置を提供する。
【解決手段】 ブレーキECU1は、ブレー故障センサ6からブレーキ故障信号を受信した際に、警報装置8に警報信号を送信するとともに、パワートレインECU2にブレーキ異常信号を送信する。パワートレインECU2は、ブレーキ異常信号を受信した場合に、パワートレイン5におけるクラッチ12を開放する。また、車両が走行する道路の路面勾配が上り勾配である場合には、クラッチ12を係合する。
(もっと読む)
車両の制御方法及び車両の制御装置
【課題】車両の停止時に該車両からの作動音の発生を抑制できる車両の制御方法及び車両の制御装置を提供する。
【解決手段】運転手によるブレーキペダルの操作によって車両が停止する場合、ブレーキ用ECUは、車両が停止する前に、自動変速機の入力クラッチを作動させてエンジンから後輪への動力伝達効率を低減させる(第4のタイミングt24)。その後、運転手によるブレーキペダルの操作によって車両が停止した場合、ブレーキ用ECUは、各リニア電磁弁に対する電流値Islを調整して車両に対する制動力を保持させる(第5のタイミングt25)。
(もっと読む)
車両用駆動装置の制御装置
【課題】アクセルオフ走行状態以外の車両の走行状態でも動力伝達経路を適宜遮断することにより車両の燃費を向上させることができる車両用駆動装置の制御装置を提供する。
【解決手段】エンジン10と、エンジン10と駆動輪22との間の動力伝達経路を接続または遮断する電磁クラッチ16とを備えた車両用駆動装置8において、動力断続制御手段52は、エンジン10から車両制動方向に発生するエンジンブレーキ力TEBが、アクセル操作に基づいて車両駆動方向に発生するアクセル駆動力TAC以上である場合には、電磁クラッチ16によってエンジン10と駆動輪22との間の前記動力伝達経路を遮断する。従って、その動力伝達経路を遮断することによって、アクセル操作がなされていても車両の惰性走行による走行距離を伸ばすことができるので、車両の燃費を向上させることが可能である。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジンとモータの両方の駆動力で走行するHEV走行モードによる減速時、的確なエンジンストールの発生予測に基づく先行制御により、エンジンストールの発生を回避することができるハイブリッド車両の制御装置を提供すること。
【解決手段】エンジンEngと、モータ/ジェネレータMGと、自動変速機ATと、第1クラッチCL1と、第2クラッチCL2と、を駆動系に有する。このFRハイブリッド車両において、車両減速時、自動変速機ATの変速比を1速に変化させるコーストダウン変速を行い(図5のステップS9)、「HEV走行モード」での走行中、車両減速度と、コーストダウン変速状態とに基づいて、エンジンストールが発生するか否かを予測し(図5のステップS10,ステップS11)、エンジンストールの発生が予測されたとき、第1クラッチCL1を開放状態とする(図5のステップS12)。
(もっと読む)
クラッチの制御装置
【課題】燃費を低減しつつ内燃機関の再始動の際に発進意思のない場合における車両の急発進を回避することができるクラッチの制御装置を提供すること。
【解決手段】内燃機関1と変速機3との間の動力伝達経路上にクラッチ2が配設された車両に搭載されるとともに、クラッチ2を制御するクラッチの制御装置30において、変速機3のシフトポジションがニュートラル以外であり、かつ、クラッチ2の断接を操作するクラッチペダル13が非係合側から係合側に操作中であること等によって停止中の内燃機関1を自動的に始動させた後、クラッチペダル13が係合側に操作された際、内燃機関1のアクセル操作に応じてクラッチペダル13とは別に設けられたクラッチアクチュエータ21を制御し、クラッチペダル13が係合側に操作された際、アクセル操作がオフのときに車両がクリープ発進するようにクラッチアクチュエータ21を制御する。
(もっと読む)
車両用制御装置
【課題】状況に応じてニュートラル制御機能又はアイドルストップ機能を適切に実行させることができる車両用制御装置を提供する。
【解決手段】アイドルストップ機能を有すると共に、変速装置の入力クラッチと、エンジンにより駆動される機械式ポンプと、エンジンの停止時に電動モータにより駆動される電動ポンプと、を有する車両に備えられた車両用制御装置41。少なくとも所定のニュートラル移行条件を満たす場合に、入力クラッチに対する供給油圧を油路のライン圧により制御し、入力クラッチが半係合状態とされるニュートラル状態を実現するニュートラル制御部45と、ニュートラル移行条件が成立した場合に、ニュートラル状態への移行を所定の遅延時間だけ遅延させる移行遅延制御部47と、遅延時間中にアイドルストップ条件が成立しなかった場合に、ニュートラル状態に移行させる移行開始制御部49と、を備える。
(もっと読む)
車両制御装置
【課題】車両の停車時において、エンジンから発生する熱量を増大させることが可能な車両制御装置を提供する。
【解決手段】エンジンと、エンジンから入力された駆動力を変速して出力可能な変速機と、エンジンの出力軸と変速機の入力軸とを係合可能なクラッチと、を備えた車両を制御可能な車両制御装置において、エンジン負荷を検出可能なエンジン負荷検出手段と、車両の停車時において、検出されたエンジン負荷が目標エンジン負荷となるように、クラッチの係合状態を制御可能なクラッチ制御部と、を備えた。
(もっと読む)
作業車両における駆動力制御装置
【課題】作業車両の作業時の操作性を確保しつつ作業車両のブレーキが過熱することを確実に抑制できるようにする。
【解決手段】湿式ブレーキ装置の冷却油の温度が計測され、計測されたブレーキ冷却油温が所定値以上になった場合に、エンジンから駆動輪に伝達される駆動力を低減する制御を行なう。ブレーキ冷却油温が各温度レベルを超える毎に段階的に駆動力を低減する。
(もっと読む)
発進クラッチの制御方法
【課題】
運転者がアクセルペダルとブレーキペダルを共に踏み込んだ場合において、クラッチ締結時のショックまたはエンストを防止できる自動車の制御方法および制御装置を提供することにある。
【解決手段】
運転者がアクセルペダルとブレーキペダルを共に踏み込んだ場合は、発進クラッチの押付け部材の位置を所定位置より解放側へ制限、もしくは押付け荷重を所定荷重以下とするため、目標クラッチ伝達トルクTTCを目標クラッチトルク上限値TTCLIMで制限する。
(もっと読む)
クラッチ制御装置
【課題】駆動輪が転動を開始した時のクラッチ制御量に基づいて制御補正量を算出し、クラッチの制御量に対して補正を行うことができるクラッチ制御装置を提供する。
【解決手段】駆動輪転動開始検知手段160は、車両の発進時にクラッチを接続方向に駆動する際に、車速センサ181から最初のカウンタパルスが出力されたタイミングを駆動輪の転動開始点として検知する。この転動開始点において検知されるクラッチ制御電流値と、予め設定された基準値との差に基づいてクラッチの制御補正値を算出する。クラッチの制御補正値は、目標クラッチ容量補正係数導出手段120によって導出される目標クラッチ容量補正係数Hと、無効ストローク詰め油圧導出手段140によって導出される無効ストローク詰め油圧Pとを適用して算出される。変速制御部100は、この制御補正値をバルブ42の制御電流値に適用して、第1クラッチCL1,第2クラッチCL2を制御する。
(もっと読む)
1 - 20 / 73
[ Back to top ]