
Fターム[3J062CB03]の内容
伝動装置 (28,056) | リンク、レバー等による伝動装置の特徴 (1,496) | 特徴となる伝動手段 (448) | リンク (265) | 3次元リンク (88)
Fターム[3J062CB03]の下位に属するFターム
パラレルリンク (37)
Fターム[3J062CB03]に分類される特許
21 - 40 / 51
ヘキサポッド
独立した継ぎ手に装着された少なくとも5本、好ましくは6本のロッドがその上に配置された、好ましくは板状の受け器を備え、各ロッドのもう一方の端はマウンティングに接合されており、全てのマウンティングが移動路に沿って動くことができる、ヘキサポッドである。各マウンティング(8)を独立した支持部(3)に配置し、各マウンティング(8)がそれぞれの支持部(3)に沿って移動可能であるか、またはそれぞれの支持部(3)が対応のマウンティング(8)とともに移動可能であるかのいずれかであり、支持部(3)が環または環の一部であるか、あるいは二次元または三次元的な回旋状の空間形態を有し、閉じたまたは開いた移動路を規定している。 (もっと読む)
ロボットの関節機構の制御装置

【課題】ジンバルリンクを有するロボットの関節機構による動作を簡易なアルゴリズムで高精度に解析することができるロボットの関節機構の制御装置を提供する。
【解決手段】固定位置算出手段により、第1モータ191および第2モータ192のモータ角θ1およびθ2から、第1ロッド171および第2ロッド172の他端位置171b,172bを算出しておき、仮ロッド長算出手段12が、一端位置171a,172bの前回値を用いて、第1ロッド171および第2ロッド172の仮ロッド長L´を算出する。そして、ロッド不定位置決定手段16が、この仮ロッド長L´と実際のロッド長Lとの偏差であるロッド偏差ΔDを0に収束させることで、第1ロッド171および第2ロッド172の一端位置171a,172aを決定する。最終角度出力手段17が、一端位置171a,172aから、メインリンク150の姿勢角α,βや手180の姿勢角を算出して出力する。
(もっと読む)
平行アームを持つロボットあるいは触覚インターフェース構造体
本発明は6自由度を有すると共にベース(2)と二つの平行なアーム(B,B')とリストジョイント(P)とを有するロボットまたは触覚インターフェース構造体に関し、アーム(B,B')はベース(2)とリストジョイント(P)との間に回動可能に設けられ、アーム(B,B')は、ショルダージョイント(3,3')とアーム(4,4')とリストジョイント(P)を支持する前腕(6,6')とを具備し、リストジョイント(P)は、それに対してハンドルホルダー(18)が第1の回転軸線(X)を中心として連結される連結セグメント(24)と、第2の回転軸線(Z)を中心としてハンドルホルダー(18)に回動可能に連結されたハンドル(16)であって、第1の軸線(X)、第2の軸線(Z)および第3の軸線(Y)を中心として回動可能なハンドル(16)とを備え、連結セグメント(24)の回転に対する少なくとも第1の回転軸線(X)を中心とするリストジョイント(16)の回転を低速化する手段が連結セグメント(24)に対して、さらにヒンジ結合されている。  (もっと読む)
(もっと読む)
マニピュレータ及びこれを用いたマニピュレーション装置
【課題】簡易でかつ新規な構造を持つ、屈曲動作が可能なマニピュレータを提供する。
【解決手段】第1駆動シャフト101は、それ自身の中心軸を中心として回動する。第2フレーム104は、第1フレーム102に対して回動する。第1フェースギヤ部材103は、第1駆動シャフト101により、正逆方向に回転駆動される。第3フレーム108は、第2フレーム104に対して回動する。第1ギヤ部材105は、第2フレーム104に固定されている。第1ギヤ部材105及び第2ギヤ部材106は、いずれも、第1フェースギヤ部材103によって回転駆動される。第2フレーム104は、第1ギヤ部材105の回動に伴って回動する。第3ギヤ部材107は、第2ギヤ部材106によって回転駆動される。第3ギヤ部材107は、第3フレーム108に固定されている。第3フレーム108は、第3ギヤ部材107の回動に伴って回動する。
(もっと読む)
自由運動シミュレータ装置
【課題】 航空機や自動車用シミュレータとして、従来からスチュワート型のパラレルメカニズムが用いられているが、特に、小型航空機の極限的動作、特に失速、きりもみ等の状態の再現では傾斜角が不足し、動作範囲も狭いことから、小型、低価格で動作範囲が広く、角度を大きく取れる、新規のパラレルメカニズムからなる小型航空機用のモーション付きシミュレータを提供する。
【解決手段】平面上に一端を同一軸に固定した、直線駆動アクチュエータ2を用い、該アクチュエータ2の他端に直角方向に駆動可能とする駆動装置6を設け、円周方向移動と同時に軸方向移動を可能とする3組のアクチュエータ2で構成されると共に、モーションプレート1は、その下部に、円周上の対向位置に120度間隔で3組の受け部を配置し、平面上に設置したアクチュエータと、モーションプレート1の受け部とを、それぞれ対応するように、上部に回転軸受構造4、下部に球面軸受構造5を有する3組の脚部3で連結した構成のパラレルメカニズムからなるものとする。
(もっと読む)
パラレルリンクステージの調整方法、基準位置決め治具、およびパラレルリンクステージ
【課題】パラレルリンクステージの調整方法、基準位置決め治具、およびパラレルリンクステージにおいて、ベースに対するエンドエフェクタの基準位置出しとアクチュエータの原点補正とを、高精度かつ容易に行うことができるようにする。
【解決手段】パラレルリンクステージの調整方法であって、各パラレルリンク機構の動作を自由化するリンク自由化工程と、ベース2およびエンドエフェクタ3を相対移動させ、上基準部材28および下基準部材30を介して、ベース2およびエンドエフェクタ3を一定の位置関係に連結する位置出し工程と、各パラレルリンク機構のエンコーダから、各リンク長を取得して制御部に記憶させる調整位置取得工程と、上基準部材28および下基準部材30をパラレルリンクステージから取り外す基準位置決め治具取り外し工程と、各パラレルリンク機構の各リンク長を、制御部に記憶された各リンク長に設定する位置初期化工程とを備える。
(もっと読む)
車両用シートのクラッチ機構
【課題】乗員に体格差が生じている場合であっても、車両の後突によって生じる乗員の背凭れ荷重のみを揺動部材へ伝達可能な車両用シートのクラッチ機構を提供することである。
【解決手段】車両用シートのクラッチ機構は、車両の後突によって生じる慣性力がウェイト64に作用した状態で、受圧部材50がシート1に着座した乗員の背凭れ荷重を受けて回動すると、その回動によって連結アーム60に形成されたピン65がシートバック20のフレーム22側に組み付けられた揺動部材70に形成されたリブ73を押し当てて揺動部材70を回動させるように移動することで、乗員の背凭れ荷重を揺動部材70へ伝達する。揺動部材70のリブ73には、受圧部材50の回動によって移動している連結アーム60のピン65が嵌まり込み可能な切欠73bが形成されており、この切欠73bに連結アーム60のピン65が嵌り込むと、揺動部材70を回動させる。
(もっと読む)
自由運動フライトシミュレータ装置
【課題】 航空機用シミュレータとして、従来から大型機用としてスチュワート型のパラレルメカニズムが用いられているが、小型機の極限的動作、特に失速、きりもみ等の状態の再現では傾斜角が不足し、動作範囲も狭いことから、小型、低価格で動作範囲が広く、角度を大きく取れる、新規のパラレルメカニズムからなる小形機用モーション付きフライトシミュレータを提供する。
【解決手段】 平面上に2本の直線駆動アクチュエータ2を直角に交差させたX−Yユニット6を3組、円周上の対向位置に120度間隔で配置すると共に、モーションプレート1の下部に、円周上の対向位置に120度間隔で3組の受け部を配置し、該X−Yユニット6の駆動部と、該モーションプレートの受け部とを、それぞれ対応するように、上部に回転軸受構造4を有し、下部に球面軸受構造5を有する3組の脚部3で連結した構成のパラレルメカニズムからなるものとする。
(もっと読む)
立体カム機構
【課題】従節側の目標軌跡の選定の自由度を格段に向上させ、直交軸間の動力伝達に限ることなく、強力かつ確実な動力の伝達が可能で、可逆的な動作も可能な立体カム機構を提供する。
【解決手段】支持部材5に軸支された所定のカム回転軸1Aの周りを回転する立体カム1のカム案内面2(3)に、支持部材5の他の部分に軸支された従節側リンク4が案内される立体カム機構とする。立体カム1に3次元的なカム案内面2(3)を形成し、このカム案内面2に、従節側リンク4の一端に形成したカムフォロワ6(7)をガイドさせる。立体カム1の回転によって、カム案内面2のカムフォロワ6がガイドされる箇所のカム回転軸1Aからの半径とカム回転軸1A方向の高さが徐々に変化するように設けることで、立体カム1の回転運動を従節側リンク4の他端の揺動運動に変換させる。
(もっと読む)
2つの回転軸を中心とする二方向回転運動を、単一の回転軸を中心とする一方向回転運動に変換するための装置、および該装置を用いた発電システム
入力としての任意の二方向回転運動から、出力としての一方向回転運動を生成する装置に関する。本装置は、第1の入力回転軸(1)と、第1の入力回転軸(1)に対して直角である第2の入力回転軸(2)と、出力回転軸と、第1の入力回転軸を中心とする、および/または第2の入力回転軸を中心とするの時計回りまたは反時計回りの回転運動を、出力回転軸を中心とする一方向回転運動に変換するために、第1の入力回転軸と出力回転軸との間、および第2の入力回転軸と出力回転軸との間に設けられた伝達手段(6A、6B、6C、91、9B、および9C)とを備え、第1の入力回転軸のいずれか一つは、出力回転軸と同一であることを特徴とする。  (もっと読む)
(もっと読む)
パラレルリンク型作業装置
【課題】パラレルリンク型作業装置において、可動部に動力を伝達する動力伝達部のリンク等がベースの領域からはみ出ないようにする。
【解決手段】ベース4に扁平な回転型アクチュエータ6を3つ設ける。アクチュエータ6は、その回転出力軸がベース4に対して平行で、ベース4の中央に向き、かつベース4の中央から放射状に並ぶように配置、固定されている。各回転型アクチュエータ6の回転出力軸と可動部5とを平行リンク機構21で構成される動力伝達部で連結する。3つの回転型アクチュエータ6を駆動して可動部5の位置を制御する。ベース4に設けられたエンドエフェクタ姿勢制御用のアクチュエータ7で回転動力伝達手段15を介して可動部5に設けたエンドエフェクタ20を回転させる。平行リンク機構21はベース4の内側領域で移動することから、リンク等がベースの領域からはみ出ることはなく、安全が確保できる。
(もっと読む)
立体カム機構
【課題】 カム案内面形状の自在な選定を可能として、従節側の目標軌跡の選定の自由度を格段に向上させ、直交軸間の動力伝達に限ることなく、強力かつ確実な動力の伝達が可能で、可逆的な動作も可能な立体カム機構を提供することを目的とする。
【解決手段】 立体カム1に3次元的なカム案内面2(3)を形成するとともに、このカム案内面2に前記従節側リンク4の一端に所定の角度にて形成したカムフォロワ6(7)をガイドさせるようにして、立体カム1の回転運動を従節側リンク4の他端の揺動運動に変換するように構成したことにより、カム案内面形状の自在な選定を可能として、従節側の目標軌跡の選定の自由度を格段に向上させ、支持部材の形状の選定と相まって、直交軸間の動力伝達に限定されることなく、また、バックラッシを伴うことなしに、カム案内面形状の自在な設計により立体カムの円滑な動作が得られる。
(もっと読む)
3自由度回転システムのガイドレールストッパ機構とその応用
【課題】3自由度回転システムにおいて、ロータの回転が制御不能となる特異点を、アクチュエータ等の複雑な機構を使用せずに回避する。
【解決手段】第一ガイドレール11と、これと直交する第二、第三ガイドレール12、13を備えた3自由度回転システム100において、凹部72cを備えたメス型ストッパ72を第二ガイドレール12または第三ガイドレール13のいずれか一方に備えさせ、オス型ストッパ71をもう一方のガイドレールに備えさせ、オス型ストッパ71が凹部72cの中をスライドするとともに、オス型ストッパ71が凹部72cのどちらか一方の端に当たることにより、オス型ストッパ71のスライドが制限され、これにより、第二ガイドレール12と第三ガイドレール13の回転角度の差分が制限される。
(もっと読む)
2つの要素を相対的に移動させる装置
【課題】2つの要素を相対的に移動させる装置において、構造がシンプルで、2つを隣接して配置することができ、且つ必要な剛性および強度を有する装置を提供すること。
【解決手段】本発明による2つの要素1,2を相対的に移動させる装置は、接続構成4によって直列結合される2つのリンク構成5,6を備える。第1リンク構成5は、ほぼ同じ長さで平行な少なくとも3本のリンク9,14を備え、前記リンクは、接続構成4と要素2の間で、リンクの縦軸に沿って見るとほぼ三角形の関係で配置される。第2リンク構成6は、接続構成4と要素1の間で作用する少なくとも1つの平行四辺形を備える。第1および第2駆動構成17,18は、第1リンク構成5を旋回させるようになっている。第3駆動構成33は、第2リンク構成6を旋回させるようになっている。
(もっと読む)
作業補助装置および複合パンタグラフ機構
【課題】構造の簡略化を図るとともに汎用性の高い作業補助装置を提供する。
【解決手段】本発明に係る作業補助装置A1は、支持ベース1と、支持ベース1に対してZ軸方向に伸縮するZ軸駆動機構2と、Z軸駆動機構2に対して基端部が接続され、この基端部に対して先端部がX軸,Y軸方向に沿って揺動する揺動駆動機構3と、上記先端部に接続され、XYZ方向に操作可能な操作部材4と、操作部材4のXYZ方向の操作力を個別に検出する操作力検出手段5と、操作力検出手段5からの情報に基づきZ軸駆動機構2および揺動駆動機構3を操作部材4の操作方向への移動を支援するように制御する制御手段とを備える。また、揺動駆動機構3は、上記基端部に対して上記先端部がX軸に沿って揺動可能な第1のパンタグラフ機構と、上記基端部に対して上記先端部がY軸に沿って揺動可能な第2のパンタグラフ機構との複合パンタグラフ機構によって構成される。
(もっと読む)
3自由度能動回転関節
【課題】各自由度方向からなる任意の方向への一様な回転運動が可能であり、球関節に近いシンプルな構造を有する3自由度能動回転関節を提供する。
【解決手段】X軸用、Y軸用、Z軸用の中空軸回転型モータ20x、20y、20zの中空軸に挿設された出力軸21x、21y、21zに結合する回転球10と、中空軸回転型モータ20x、20y、20zをそれぞれ、それ自身の軸線まわりの回転を規制するとともに、他の直交2軸まわりのうち一方への回動を許容するように支持する可動支持体30x、30y、30zと、可動支持体30x、30y、30zをそれぞれ前記他の直交2軸まわりのうち他方への回動を許容するように支持する支持体50とを備え、一方のリンク60aがZ軸用の中空軸回転型モータ20zの後端から突出する出力軸21zに同軸上に固定され、他方のリンク60bが支持体50の支持端部50zの外面側に固定される。
(もっと読む)
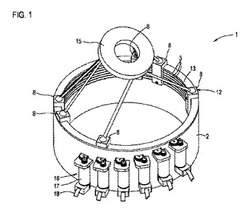
座標位置決め機械
座標位置決め装置は、ベース(12)と、構造体(14)と、ベースおよび構造体を結合する6つの支柱(22,24,26,28,30,32)を有する。ベース、構造体および6つの支柱によって作動空間が画成される。支持構造体からは支持部材(16)が延在している。作動空間内への少なくとも1つのアクセス領域が設けられ、そのアクセス範囲は隣接する2つの支柱(22,32)により形成され、アクセス領域の範囲は他の隣接する支柱のセット間の範囲よりも大である。これにより作動空間へのアクセスが改善される。  (もっと読む)
(もっと読む)
ピボットジョイント
ピボットジョイントは、一端に配置されたボールを有する第1部材と、第1部材のボール上に位置する、1つまたは複数の支承表面を有する固定部材と、第1部材のボール上に位置する、一端に配置された1つまたは複数の支承表面を有する第2部材とを備える。第1部材と第2部材は、ボールの中心の周りで回転可能である。このタイプのピボットジョイントは、スチュアートプラットフォーム(Stewart platform)などの機械で使用するのに適する。 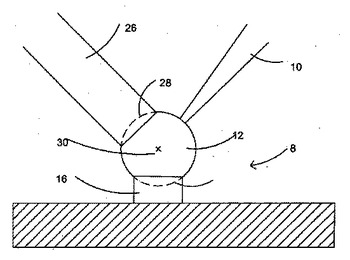 (もっと読む)
(もっと読む)
晶析方法、及び晶析装置
【課題】 本発明は、二次核発生を抑制し、少ない種晶で以て平均粒径の大きい結晶を析出させることができる晶析方法を提供することを課題とする。
【解決手段】 種晶と化合物を含む溶液を晶析槽200に供給し、晶析槽200内に設けられた攪拌装置500によって該溶液を攪拌し、種晶の表面に化合物の結晶を析出させる晶析方法において、攪拌装置500として、偏平状の2つの攪拌パドルを有する攪拌手段と、回転駆動手段からの回転力を受けて2本の平行な回転出力軸を互いに反対方向へ回転させて攪拌手段側に伝達する回転力伝達手段とを備え、回転中の2本の回転出力軸の各角速度が補完的に変化する状態で2つの攪拌パドルに8の字形のパドル運動を行わせるリンク機構を構成した攪拌装置を用いる晶析方法。
(もっと読む)
ロボットの駆動機構及びロボットハンド
【課題】本発明は、1つのアクチュエータで2つの関節を駆動する機構において、高負荷がかかる姿勢においても、対象物に対して十分な操作力を加えることが可能な多関節ロボット、特に小型化されたロボットハンドの駆動機構を提供することを目的とする。
【解決手段】本発明のロボットの駆動機構は、第一リンクと第二リンクの接合部にある第一関節と、第二リンクと第三リンクの接合部にある第二関節の2つの関節を、1つのアクチュエータとリンクアームにより連動して駆動できるようにしたロボットの駆動機構において、アクチュエータを第一リンク又は第二リンクに配置し、リンクアームは、その一端部が第一リンクに設けられた第一支軸を介して回転可能に軸支されるとともに、他端部が第三リンクに設けられた第二支軸を介して回転可能に軸支され、第一リンク、第二リンク及び第三リンクの伸展姿勢にて、前記第一支軸を、前記第一関節の軸と前記第二支軸を結ぶ線上に配置することを特徴とする。
(もっと読む)
21 - 40 / 51
[ Back to top ]