
Fターム[3J062CB04]の内容
伝動装置 (28,056) | リンク、レバー等による伝動装置の特徴 (1,496) | 特徴となる伝動手段 (448) | リンク (265) | 3次元リンク (88) | パラレルリンク (37)
Fターム[3J062CB04]に分類される特許
1 - 20 / 37
リンク作動装置
【課題】 コンパクトな構成でありながら、精密で広範な作動範囲の動作が可能で、かつ回転対偶部に設けられた軸受の長寿命化を実現できるリンク作動装置を提供する。
【解決手段】 基端側のリンクハブ2と基端側の端部リンク部材5との回転対偶に軸受を介在させる。制御装置によりアクチュエータを制御して、定められた作業動作を実行させる作業時制御と、この作業時制御の停止中になされ、軸受に封入されているグリスを循環させるグリス循環制御とを行う。作業時制御における折れ角の最大値θmaxは、機構上可能な折れ角の最大値である最大可動折れ角θ´maxを超えないものとし、かつグリス循環制御における折れ角の最大値は、作業時制御における折れ角の最大値θmaxよりも大きく、かつ最大可動折れ角θ´maxよりも小さい値とする。
(もっと読む)
パラレルメカニズム及びパラレルメカニズムを用いた位置決め装置

【課題】広い屈曲角度を有しながらも、屈曲方向以外の相対的な回転剛性が高く、ねじれにくい高精度な特性を有するパラレルメカニズム及び位置決め装置を提供すること。
【解決手段】位置決め装置1は、パラレルメカニズム2と、パラレルメカニズム2を駆動するリニアアクチュエータ70,80,90と、リニアアクチュエータ70,80,90を保持する保持部7と、スタンド100とから構成される。パラレルメカニズム2は、3組の平行四節リンクからなるアーム部10,30,50から構成され、アーム部10の先端部には、先端部金具14が設けられ、リンク11,12の先端部には、各々、第二互違溝付きばね22,23を介して、先端部金具14が固定され、先端部金具14には、第一互違溝付きばね21を介して接続金具15が固定され、接続金具15にエンドエフェクタ9が固定される。アーム部30,50も同様の構造である。
(もっと読む)
変速制御装置及び変速比制御方法
【課題】偏心量に対する変速比の特性が幾何学的に非線形な無段変速機における変速比を適正に制御可能な変速制御装置を提供する。
【解決手段】四節リンク機構式の無段変速機における変速比を制御する変速制御装置は、動力源への要求出力及び動力源の回転数に応じた、無段変速機への目標入力トルクを導出する目標入力トルク導出部と、動力源への要求出力に応じた、無段変速機における目標入力回転数を導出する目標入力回転数導出部と、目標入力トルク、目標入力回転数、並びに、無段変速機における実際の入力回転数及び出力回転数に基づいて、偏心量を制御するための偏心量制御項を導出する偏心量制御部とを備える。偏心量制御部は、目標変速比、目標入力トルク及び目標入力回転数に基づいて、偏心量制御項を構成するフィードフォワード制御項を導出するFF制御部と、実変速比と目標変速比の差に応じて、偏心量制御項を構成するフィードバック制御項を導出するFB制御部とを有する。
(もっと読む)
剛性を有する複数の弾性ワイヤーを用いたパラレルメカニズム
【課題】従来のパラレルメカニズム等の多自由度機構は、一般的に構造が複雑で、柔軟性も低い。
【解決手段】本発明のパラレルメカニズムは、剛性を有する複数の弾性ワイヤーを合理的に用いて構成することにより、従来のパラレルメカニズムでは不可能であった柔軟な動きを行えるようにした多自由度機構を提供するものであり、即ち、剛性を有し、円形断面で単線の弾性ワイヤー1の複数本が、被駆動側部材2と駆動側部材3の各支点位置において同一配置となるように接続されており、また被駆動側部材と駆動側部材間には弾性ワイヤーを、横断面方向から見た配置を維持しつつ、軸方向に移動及び軸方向の回りに回転可能に支持する中間支持部材4が設けられているパラレルメカニズムである。
(もっと読む)
5軸を有する力覚提示マニピュレータ
【課題】エンドエフェクタがマニピュレータのベースに対して、3自由度の並進運動および2自由度の回転動作を出力可能であり、小型で、広い範囲の回転動作が可能な力覚提示マニピュレータを提供する。
【解決手段】力覚提示マニピュレータは、マニピュレータのベース10と、エンドエフェクタ60と、エンドエフェクタ60を支持する3本のアーム20a、20b、20cと、エンドエフェクタ60と3本のアーム20a、20b、20cを連結する3本の連結リンク23a、23b、23cと、3本のアーム20a、20b、20cを駆動する駆動手段と、を備える冗長パラレルメカニズムを用いた構成となっている。
(もっと読む)
マニピュレータ及びその制御方法
【課題】減速機を使用せずに、バックドライバビリティを高めることができるマニピュレータを提案する。
【解決手段】マニピュレータ11は、第1乃至第5のリンク12乃至14並びに20及び21と、第1の可動スライダ15と、第2の可動スライダ22と、第1乃至第4の固定スライダ16及び17並びに23及び24と、第1乃至第4の駆動源8及び9並びに25及び26とを備える。第2乃至第4のリンクをスライドさせて、第1及び第2の可動スライダ15、22をスライドさせることにより、第1のリンク12を枢軸運動させて、第1のリンク12の速度を可変にして、しかもトルクを可変にする。
(もっと読む)
多自由度移動体
【課題】可動部を高速移動できるようにする。
【解決手段】ベース部10と可動部5との間の距離が変化しても、伸縮リンク機構により構成された伝達機構7が伸縮して距離の変化に対応しつつ、電動機2dの回転運動を回転部8に伝達することができる。伸縮リンク機構として構成した伝達機構7は軽量なカーボン製とすることができるため、伝達機構7を軽量化でき、その結果、可動部5を高速動作させることが可能な多自由度移動体1を実現できる。
(もっと読む)
パラレルリンクロボット
【課題】一般に、ロボットの駆動源であるモータの取り付け方法として、モータフランジ面をプレートに固定し、このプレートを、ロボット本体に結合する構造を採用することが多い。パラレルリンクロボットにおいても、この構成が一般的である。しかしながら、従来の技術では、高速動作時の振動等の影響で、モータの主軸がぶれ、取り付け面とモータの相対位置がずれることにより、ロボットの位置決め精度が低下するという課題がある。
【解決手段】本発明のパラレルリンクロボットのモータ取付け方法は、対向するモータを取り付ける部材を有し、これを一体のブロック構造とするものである。これにより、従来の課題を解決し、少なくとも対向する2つのモータ主軸の中心軸を一致させ、高速動作時におけるロボットの位置決め精度低下を軽減する方法および装置である。
(もっと読む)
力検出機能をもった駆動装置
【課題】駆動機能と力検出機能を備えた装置の構造単純化/薄型化を図る。
【解決手段】上方基板15と下方基板25との間に、2本のリニアアクチュエータU1,U2を、互いに逆方向に傾斜するように配置する。アクチュエータU1,U2の上端は、上方膜部11,12を介して上方基板15に接続され、下端は、導電性の下方膜部21,22を介して下方基板25に接続される。上方基板15に右方向の力が作用して右方へスライドすると、U1は寝る方向へ傾いて下方膜部21は上方へ変形し、U2は立つ方向へ傾いて下方膜部22は下方へ変形する。下方膜部21と電極E5による容量素子と、下方膜部22と電極E6による容量素子との容量値の差により、X軸方向の力検出を行う。両容量値の和により、Z軸方向の力検出もできる。アクチュエータU1,U2を伸縮駆動すれば、上方基板15を移動させたり回転させたりできる。
(もっと読む)
搬送装置及びシャフトユニット
【課題】簡単に処理剤が供給され得る構造を有する搬送装置及びこの搬送装置に用いられるシャフトユニットを提供すること。
【解決手段】シャフトユニット11A(及び11B、11C、11D)のベアリングホルダ220は、その軸方向の周りにフランジ部221を有し、そのフランジ部221が外部に露出するように設けられている。つまり、フランジ部221の一部である平面部223に、グリースの注入口224、225及び226が形成され、これらが露出するようにシャフトユニット11A(及び11B、11C、11D)が駆動ユニット50及びアーム部を連結している。これにより、作業者は、シャフトユニット11Aからアーム部を取り外すことなく、簡単にグリースを注入口224、225及び226から注入できる。
(もっと読む)
リンク機構
【課題】 平行な3本のリンクを有するリンク機構において、第2の部材が第1の部材に対して360°以上回転することができるようにする。
【解決手段】リンク機構Aを、次の二つの条件を満たすように構成する。第1リンク3と第2リンク4の側部どうしが、第1回転軸線C1方向及び第1リンク3の長手方向に対して直交する第3方向において互いに接触したとき、第1リンク3が第2リンク4に対して第1回転軸線C1方向へ離間する。第1リンク3と第2リンク4とが第1回転軸線C1方向において接触したとき、第1リンク3と第2リンク4の側部どうしが第3方向へ互いに離間する。
(もっと読む)
ロボットアーム
【課題】均一で安定した予圧を付与することが可能で、軸受の長寿命化が可能なロボットアームを提供する。
【解決手段】リンク機構を用いたロボットアーム10であって、スリーブ41とハウジング42との間に転がり軸受43が設けられた転がり軸受ユニット40が関節部15に使用される。
(もっと読む)
6自由度パラレル機構
【課題】エンドエフェクタが、1軸周りに連続回転することができ、ベースに対して大きな姿勢角を取ることができる、6自由度パラレル機構を提供する。
【解決手段】6自由度パラレル機構の連鎖が、ベースと、ベースの中心からベースの垂直方向上方に延びるZ軸周りを回転するように、第1の回転軸受を介してベースに取り付けられたアームと、アーム上に固定されたリニアガイドと、リニアガイドの上を往復するスライダと、球面軸受を介してスライダに接続されたリンクと、リンクの球面軸受とは反対の側に取り付けられた第2の回転軸受と、を備え、6自由度パラレル機構を、ベースとエンドエフェクタとの間に、連鎖を3本並列配置して構成し、エンドエフェクタとリンクとを、第2の回転軸受によって、互いに離れた3箇所で結合する。
(もっと読む)
パラレルメカニズム及びその制御方法
【課題】一般に、パラレルメカニズムは、外力に対する安定性は十分に備えているが、特異点や、ジョイントの動作範囲による制限のためにテーブルの動作角度が十分に取れないという短所がある。
【解決手段】そこで本発明では、ベースとテーブルの間に複数のリニアアクチュエータを回転ジョイントを介して並列に配置したパラレルメカニズムにおいて、リニアアクチュエータは7個以上とし、それらのリニアアクチュエータの動作を制御する制御装置に、適宜選択した6個のリニアアクチュエータのみを能動動作させると同時に、残りのリニアアクチュエータを受動動作させる制御機能を設けたパラレルメカニズムにより上述した課題を解決している。
(もっと読む)
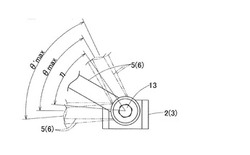
パラレルリンクステージおよび光学素子測定装置
【課題】パラレルリンクステージおよび光学素子測定装置において、パラレルリンク機構の並列方向に沿う可動部材の回転範囲を向上することができるとともに可動部材およびパラレルリンク機構によって囲まれる領域の中心部に開放空間を形成することができるようにする。
【解決手段】パラレルリンクステージ1は、回転軸線C回りに回転可能に支持された回転台部2と、回転台部2を回転軸線C回りに回転させるモータ10と、回転台部2と間隔をあけて配置される可動部材3と、回転台部2および可動部材3の間で回転軸線Cを取り囲むように周方向に間隔をあけて少なくとも3箇所で回転台部2および可動部材3を連結し、回転台部2に対する可動部材3の各連結距離を変化させるパラレルリンク機構4と、パラレルリンク機構4およびモータ10の動作制御を行うことにより、可動部材3の位置制御および姿勢制御を行う制御ユニット50と、を備える。
(もっと読む)
商品充填方法および商品充填装置
【課題】 パラレルロボットを用いて商品の段ボール箱への導入を効率よく行う。
【解決手段】 パラレルリンク対44、45、46の先端に連結された吸着パッド47を一定の三次元空間内の任意の位置に配置し得るパラレルロボット4を用いた商品充填方法であって、第1の搬送コンベア2により商品Pを搬送しつつ、商品Pが充填される段ボール箱Bを第2の搬送コンベア3により搬送するとともに、段ボール箱Bのフラップのうち、第1、第2の搬送コンベア2、3間に配置される第1のフラップB1を、第2の搬送コンベア3の搬送方向に沿って延設された第1のガイドバー10によって、段ボール箱Bの搬送中に拡開させるとともに、パラレルロボット4の吸着パッド47により第1のコンベア2上の商品Pを保持し、これを第2の搬送コンベア3により搬送中の段ボール箱B内に、拡開された第1のフラップB1の上を通って導入する。
(もっと読む)
パラレルロボット
【課題】ツール姿勢制御用の補助駆動機構を備えたパラレルロボットにおいて、可動部の作動領域が補助駆動機構の構成によって制約される問題を解決する。
【解決手段】手首部駆動機構20は、第1回転軸44aの周りで回転可能な中空の外側ホルダ44と、第1回転軸に直交する第2回転軸46aの周りで回転可能に外側ホルダに内設される中空の中間ホルダ46と、第2回転軸に直交する第3回転軸48aの周りで回転可能に中間ホルダに内設される中空の内側ホルダ48と、外側ホルダ44を回転駆動する原動機52と、第3回転軸に直交する直動軸54aに沿って回転拘束状態で直動可能に内側ホルダに受容される棒状の伝動部材54とを備える。伝動部材54は、内側ホルダ48から離隔した一端で自在継手を介して手首部に接続され、外側ホルダ44の回転を手首部に伝達して、第3回転軸に直交する第4回転軸の周りで手首部を回転運動させる。
(もっと読む)
平行リンク式機器支持装置
【課題】付勢手段の付勢力を有効に活用し、リンクを円滑に起倒させることができるようにした操作性のよい平行リンク式機器支持装置を提供する。
【解決手段】ベース6に、リンク19の枢軸21を中心とする円弧状をなす円弧溝30a、およびその一端より連続し、かつ円弧溝より枢軸21寄りに湾曲する湾曲溝30bとからなる第1のガイド溝30と、この第1のガイド溝30から枢軸21の円周方向に離間し、かつ枢軸21を中心とする円弧状をなす第2のガイド溝31とを設け、第1のガイド溝30に第1の摺動体32を、また第2のガイド溝に第2の摺動体33を、それぞれ各ガイド溝30、31の長手方向に摺動可能として嵌合し、第1および第2の摺動体32、33を、板ばね35により、互いに円周方向に拡開するように付勢する。
(もっと読む)
マニピュレータ
【課題】3次元空間的上で広い可動範囲に亘ってリンクの関節点におけるモーメントを補償する補償機構を容易に実現することができるマニピュレータを提供する。
【解決手段】ベースリンク3と、ベースリンク3の一端に第1の回転軸を有する第1の関節点S1を介して他端が接続された中継リンク4と、中継リンク4の長手方向に平行な第2の回転軸を有する第2の関節点S2を介して中継リンク4の一端に接続された2自由度平行リンク構造からなる第1乃至第4のアームリンク6,7,8,9を有するアーム部5とを備え、第1の関節点S1における第1の回転軸及び第2の関節点S2における第2の回転軸回りの、第1のアームリンク6と第2のアームリンク7と第4のアームリンク9のモーメントの釣り合いが取れている。
(もっと読む)
パラレルメカニズム
【課題】何らかの理由で減速機の出力軸から潤滑剤が漏洩するような場合でも、漏洩潤滑剤がテーブルやコンベアの上面に滴下するのを確実に防止して、漏洩潤滑剤による食品や医薬品の汚損等を確実に防止できるパラレルメカニズムを提供する。
【解決手段】モーターブラケットを間に挟んで駆動モーターの減速機と締結プレートとを対向配置し、これら三者を締結固定する。潤滑剤の流下経路に臨むモーターブラケットと締結プレートの接合面に潤滑剤受を設け、減速機の出力軸から漏洩する潤滑剤を潤滑剤受で受け止めて、それ以上漏洩潤滑剤が流下するのを防止する。潤滑剤受の一部に潤滑剤溜を設け、潤滑剤溜に臨んで漏洩潤滑剤を検知するセンサーを設ける。以て、潤滑剤が漏洩したことをセンサーで速やかに検知し、この検知信号に基づきアラーム装置を作動させる。
(もっと読む)
1 - 20 / 37
[ Back to top ]