
Fターム[3J102DA03]の内容
その他の軸受(磁気軸受、静圧軸受等) (9,013) | 磁気軸受の構造 (1,432) | 固定側と可動側の磁石の対応構造 (1,276) | 半径方向(放射方向)に対向 (210)
Fターム[3J102DA03]の下位に属するFターム
Fターム[3J102DA03]に分類される特許
201 - 209 / 209
磁気軸受装置を制御する方法および装置

回転子が浮遊し、シャフトの周りを回転する磁気軸受装置を制御する方法および制御装置を開示する。センサー信号が変換され、所定方向(x、y)へのシャフトの傾斜移動に対応する傾斜移動信号(Sθx、Sθy)を生成するようにする。傾斜移動信号(Sθx、Sθy)から傾斜制御信号(Aθx、Aθy)が得られ、これらが変換されてアクチュエータ制御信号を生成し、電磁アクチュエータを磁気軸受装置内で駆動させる。本発明によれば、傾斜ベクトルが第一規定回転方向に装置軸(z)の周りを回転する傾斜移動が、傾斜方向ベクトルが第一規定回転方向と反対の第二回転方向に装置軸(z)の周りを回転する傾斜移動から独立して制御される。このようにして、章動および歳差制御が翼振動またはシャフト湾曲モードの干渉を受けることなく達成される。 (もっと読む)
回転軸支持装置

【課題】 ヒューズ切れを容易に判断できて、メンテナンスがし易い回転軸支持装置を提供すること。
【解決手段】 電磁石X1,X1’を駆動する電磁石駆動回路5,6が有しているヒューズのヒューズ切れを検出するヒューズ切れ検出回路7を形成する。上記ヒューズ切れ検出化回路7を、及ぼす力の力線方向が同一である対をなす電磁石X1,X1’を駆動する二つの電磁石駆動回路5,6の対毎に一つずつ形成する。
(もっと読む)
磁気浮上型モータ及びターボポンプ
【課題】 制御性に優れ、より一層の小型化及び軽量化が図れる磁気浮上型モータを提供する。
【解決手段】 ロータ1は、回転軸方向の両端に配置された各4つの電磁石からなる磁気軸受2,3によって、回転軸方向及び径方向に磁気力によって非接触で支承される。これら磁気軸受2,3間にロータ1の回転軸方向の中央部を取り囲むように、ロータ1に回転駆動力を付与するステータ4が配置される。磁気軸受2,3とステータ4との間には、磁気軸受にバイアス磁束を供給する永久磁石5,6が挿入されている。ステータ4によって回転駆動力を付与されるロータ1の中央部16cの径は、磁気軸受2,3に支承されるロータ1の両端部16a,16bの径よりも小さく設定されている。
(もっと読む)
簡易配線を有する磁気軸受装置
磁気軸受装置および係る装置の操作方法を提供する。該装置は電磁アクチュエータ(411、412、413、414)のグループ(410)からなる。各アクチュエータは増幅ユニット(701)に電気的に接続される。第一のサブグループのアクチュエータは第一の共通ノード(608)に接続され、第二のサブグループのアクチュエータは第二の共通ノード(609)に接続される。該共通ノード(608、609)は直接または追加アクチュエータのような手段により接続される。該共通ノード(608、609)は増幅ユニットとの追加電気接続を行わないのが好ましい。本発明の特別実施形態によれば、アクチュエータの各サブグループは1つの単一アクチュエータのみからなり、共通ノードは増幅器との電気接続が行われる。このように、該装置は直列構成でH−ブリッジに接続された2つのアクチュエータからなる。共通ノードは2種類の電圧のどちらに接続してもよい。本発明により、ワイヤーの負荷要求を増やすことなく簡易配線が可能となる。 (もっと読む)
位置を自動検出する能動型磁気ベアリング
位置の自動検出を行なう能動型磁気ベアリング(100)であって、このベアリングは、強磁性体(110)の両側に配置されている、固定子を形成する対向している少なくとも第1及び第2の電磁石を有し、強磁性体(110)は、回転子を形成し、複数の電磁石の間に接触しないで保持される。第1及び第2の電磁石は、各々、第1の強磁性材料により本質的に構成され強磁性体とエアギャップを規定するように協働する磁気回路(121;131)と、電力増幅器から電力供給される励起コイル(122;132)とを有し、この電力増幅器の入力電流は、第1及び第2の電磁石の磁気回路に対する強磁性体の位置に応じてサーボ制御される。この強磁性体(110)の位置は、システムの閉ループ通過帯域よりも大きな周波数の正弦波電流を両方の対向する電磁石に同時に流すことに応じて2つの前記電磁石(120、130)の間で検出されるインダクタンスから測定される。 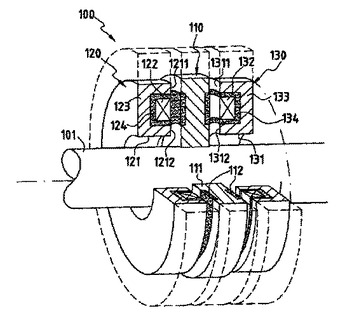 (もっと読む)
(もっと読む)
真空ポンプ装置
再生ポンプ機構は、一方の側に環状列に位置決めされた一連のブレードを有するロータと、ブレードが回転する環状チャンネルを有するステータと、を含む。ロータとステータの間の軸方向クリアランスを制御するために、アキシャル磁気軸受がロータとステータの間の相対的な軸方向移動を積極的に制御する。これは、ポンプ機構に、ラジアルシールとは全く異なって、ロータとステータの間の制御可能なアキシャルシールを提供することができる。  (もっと読む)
(もっと読む)
ターボ分子真空ポンプ
能動の磁気ベアリングを有するターボ分子真空ポンプは、主真空チャンバを規定している容器と、ロータと、電気モータと、アキシャル磁気ベアリングと、ラジアル磁気ベアリングと、軸方向検出器と、径方向検出器とを有している。前記電気モータと、前記アキシャル磁気ベアリングと、前記ラジアル磁気ベアリングとに関連付けられ、離れた外部の電気回路は、電源回路を代表的に有している。前記軸方向検出器と前記径方向検出器とによって出力される信号から、前記アキシャル磁気ベアリングと前記ラジアル磁気ベアリングを制御するための回路が、所定の樹脂中に埋め込まれ、主真空チャンバ内で前記容器中に位置されている。気密で耐漏洩の電気コネクタと、前記離れた外部の電気回路との接続を与えている前記電気ケーブルとは、各々が、10本未満の複数の接続電線を有している。  (もっと読む)
(もっと読む)
アクチュエータ
ケース(100)と、このケース(100)の内部で回転自在に支持された回転体(200)と、磁力により回転体を回転駆動するステータ(110)とを備える。ステータ(110)は、ケース(100)の外部に装着された鉄心(111)と当該鉄心(111)に巻回された磁気コイル(112)とを含む。そして、磁極を構成する鉄心(111)の端面が、少なくとも非積層強磁性体で形成され、かつケース(100)の内壁の一部を形成するように当該ケース(100)の内面に露出した構成とする。 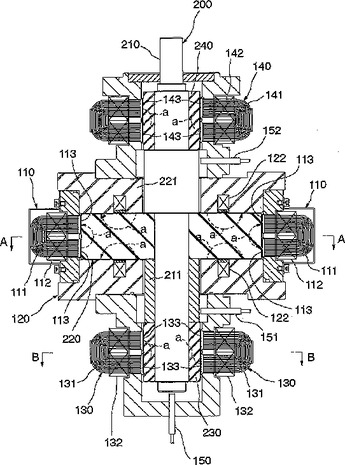 (もっと読む)
(もっと読む)
磁気浮上装置
【課題】 磁気浮上装置を特殊な構造としたり、特殊な加工を施すことなく、且つ特別なメンテナンスを必要とせず、制御対象体の温度を検出できる、装置の安全な運転を確保できる磁気浮上装置を提供すること。
【解決手段】 相対向して配置された一対の電磁石11、13と、該一対の電磁石11、13の間に配置された制御対象体15と、相対向して配置され該制御対象体15の位置変位を検出する位置変位検出センサ12、14を具備し、該位置変位検出センサ12、14の検出信号を位相補償及びゲイン調整する制御回路部20に入力し、該制御回路部20からの制御出力で、一対の電磁石11、13の磁気吸引力或いは磁気反発力を制御し、制御対象体15を該一対の電磁石11、13間の任意の位置に非接触で浮上支持制御する磁気浮上装置において、位置変位検出センサ12、14の検出信号により、制御対象体15の外形寸法を検出し該制御対象体の温度を検出する温度演算回路部30を設けた。
(もっと読む)
201 - 209 / 209
[ Back to top ]