
Fターム[3J102DA03]の内容
その他の軸受(磁気軸受、静圧軸受等) (9,013) | 磁気軸受の構造 (1,432) | 固定側と可動側の磁石の対応構造 (1,276) | 半径方向(放射方向)に対向 (210)
Fターム[3J102DA03]の下位に属するFターム
Fターム[3J102DA03]に分類される特許
41 - 60 / 209
船舶用プロペラユニットの支持体
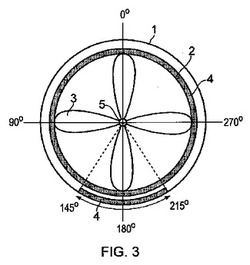
【課題】大きな振動を受けることがなく、その結果、プロペラユニットの各部の摩耗を減らすことのできる船舶用のリムドライブ・プロペラユニットを提供すること。
【解決手段】本発明は、船舶用リムドライブ・プロペラユニットの軸受装置に係る。複数のプロペラ羽根を備えたプロペラユニットの回転ロータハウジングの周りに複数の永久磁石が配設され、回転ロータハウジングを格納した外部静止ケーシングの周りに複数の永久磁石が配設される。回転ロータハウジングおよび外部静止ケーシングの一部に配設された永久磁石が同じ極性をもって互いに上下に配置される一方、回転ロータハウジングおよび外部静止ケーシングの他の部分に配設された永久磁石は反対の極性をもって相互に対向することにより、ロータハウジングと静止ケーシングとが相互に反発し、また相互に引き合うことで、相互に接触しないように構成されている。
(もっと読む)
ロール軸を支持するマグネチック軸受装置
本発明はロール軸を支持するマグネチック軸受装置に関し、特に永久磁石や電磁石を利用してロール軸を非接触式で支持するマグネチック軸受装置に関する。本発明のロール軸を支持するマグネチック軸受装置は、ロール軸に向かって形成された突出部で磁場を発生する磁石と、上記磁石を一方向に支持する胴部とを含み、上記ロール軸と上記突出部の間に空隙を形成しながら上記ロール軸を支持し、上記突出部の両側はラウンド処理されたことを特徴とする。 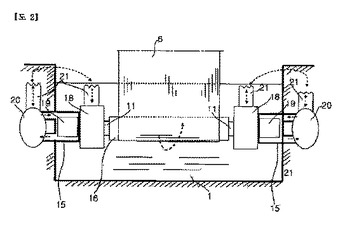 (もっと読む)
(もっと読む)
高真空ブースターポンプ

【課題】永久磁石を用いた受動型磁気軸受は、大型支持体を低価格で安定に回転させることが困難である。一方、水蒸気の排気速度を増大させるためにクライオトラップを付加すると同時に高温超伝導磁気軸受を利用するのは、高温超伝導体のコストと冷凍機の冷凍能力が過大となるため、システム全体でかえって高価格となる。
【解決手段】小型ボールベアリング式ターボ分子ポンプの前段に、クライオトラップと高温超伝導磁気軸受で支持された中型高真空ブースターポンプを配置する。中型高真空ブースターポンプを非接触電磁誘導結合機により、後段の小型ボールベアリング式ターボ分子ポンプと結合させ、小型ボールベアリング式ターボ分子ポンプの回転トルクで中型高真空ブースターポンプを回転させ、中型相当のターボ分子ポンプの排気速度を実現し、しかもクライオトラップで水蒸気の排気速度はクライオポンプ相当である真空ポンプシステムを実現する。
(もっと読む)
磁気ベアリング、回転段及び反射型電子ビームリソグラフィ装置
回転軸を持つ磁気ベアリングが、強磁性材料を有する円筒状ローターであって、上記円筒状ローターが、対称軸を持ち、上記円筒状ローターは、内側半径を持ち、上記円筒状ローターが、上部を持つ、円筒状ローターと、静的なハブであって、上記静的なハブが、該静的なハブから突出し、上記上部に隣接して配置されるオーバーハングを持つ、静的なハブと、上記第1の面と上記オーバーハングとの間の距離を制御するリフト磁気アクチュエータ装置と、上記内側半径と上記回転軸との間の距離を制御する半径方向の磁気アクチュエータ装置とを有する。 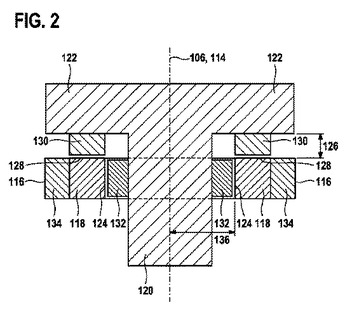 (もっと読む)
(もっと読む)
磁気軸受式大気圧動作型真空ポンプ
【課題】ターボ分子ポンプと同等の真空性能の磁気軸受式大気圧動作型真空ポンプが実現でき、磁気軸受の特徴である清浄(潤滑オイル必要なし)、超低振動(ロータとステータが無接触)、高信頼性(腐食性ガスに強い)等の利点を有する上に、1台のポンプで真空チャンバーを高真空に排気できる。
【解決手段】二つの回転翼間の結合方式を、片方の永久磁石による磁束と他方の導電体に発生する渦電流による結合方式とし、結合トルクが発生するために、常に分子流領域で動作する回転翼のほうが低い回転数であることを前提とした翼設計とする。少なくとも高真空側にある分子流領域で動作する回転翼は磁気軸受で支持し、例えば、高温超伝導磁気軸受を採用する。
(もっと読む)
磁気軸受システム
【課題】永久磁石を応用した受動型磁気軸受があるが、特定の小型ターボ分子ポンプに限定されている。その原因は2つあり、1)被支持体(ロータ)のパラメータ(重量、重心位置、慣性モーメント、慣性モーメント比、定常回転数、構造体の共振周波数等)の変更に対して自在に対応できず、異なる被支持体に対して、個別に磁気軸受の設計が必要となる、2)ロータの振れ回り現象への減衰能を大きくすることが困難。1)と2)を解消することが、受動型磁気軸受を利用する製品を拡大する課題となる。
【解決手段】上記1)、ある基本となる磁気軸受ユニットを基準にし、それに径方向受動型磁気軸受を被支持体のパラメータの変化に応じて設定付加してゆく磁気軸受システムとする。上記2)、径方向受動型磁気軸受に受動ダンパーを付加するとともに、高真空や高温環境での応用製品に対しても使用可能な金属ファイバーを利用した受動ダンパーを付加して対応する。
(もっと読む)
ターボ分子ポンプシステム
【課題】簡単かつ安価な構成により磁気軸受システムを構成し、水蒸気排気速度の増大に対応可能なターボ分子ポンプを提供する。
【解決手段】高温超伝導磁気軸受をポンプロータの軸端に設け、クライオトラップを用いた冷凍機で高温超伝導磁気軸受を冷却するよう構成したので、被支持体のパラメータの変化(例えば、回転翼の重量増大)に応じて、排気速度、支持能力、および減衰能を増大させ、高温超伝導磁気軸受部の付加コストも極小にすることができる。
(もっと読む)
制御型磁気軸受装置
【課題】 面倒な制御ゲインテーブルを作成する必要がなく、磁気浮上運転前の調整に時間を要しない制御型磁気軸受装置を提供する。
【解決手段】 制御型磁気軸受装置は、回転体4を1つの水平な制御軸X方向の所定の目標位置に磁気吸引力により非接触支持するために前記制御軸X方向の両側から回転体4を挟むように配置された1対の電磁石29Xa,29Xbを備えているものであって、回転体4の目標位置からの前記制御軸X方向の変位を検出する変位検出手段と、回転体を目標位置に支持するために各電磁石29Xa,29Xbに一定のバイアス電流および回転体4の前記変位によって変化する制御電流からなる励磁電流を供給する電磁石制御手段とを備えている。電磁石制御手段が、バイアス電流を常に0とするゼロバイアス制御を行うもので、かつ、前記変位に応じて適応的に変化するゲインで負帰還する単純適応制御を行うものである。
(もっと読む)
モータ制御装置
【課題】装置を追加することなく、停電が発生した場合でも、軸支持運転を比較的長時間保つことができるモータ制御装置を提供する。
【解決手段】停電検出器55が停電を検出したとき、駆動側制御回路11では、切替スイッチ56によって回転角速度指令値ω*を零に切り替えることにより、ベアリングレスモータ1を減速させ且つ駆動側のインバータ13を介してベアリングレスモータ1から直流リンク回路46側へベアリングレスモータ1の発電電力を回生するように駆動側のインバータ13を制御し、この回生電力が直流リンク回路46を介して軸支持側のインバータ14へ供給される構成とする。また、リミッタ下限値調整回路51では、電圧検出器54で検出される直流リンク電圧値VDCが直流リンク電圧設定値VDC*よりも低下したときに負の下限設定値を出力し、可変リミッタ57では、この負の下限設定値を可変リミッタ57の下限設定値として設定する構成とする。
(もっと読む)
タッチダウン軸受
【課題】空転停止性能に優れたタッチダウン軸受を提供する。
【解決手段】磁気軸受とともに用いられる、内輪61と、外輪62と、内輪61及び外輪62の間で転動可能に配置された転動体63とを有する転がり軸受のタッチダウン軸受であって、内輪61及び外輪62のそれぞれの対向面の一方に半硬質磁性材料からなる半硬質磁性部材64が設けられている。円環状をなす一以上の磁石部材65が、半硬質磁性部材64に対向するように内輪61又は外輪62に設けられている。
(もっと読む)
タッチダウン軸受
【課題】空転停止性能に優れたタッチダウン軸受を提供する。
【解決手段】内輪61と、外輪62と、内輪61及び外輪62の間で転動可能に配置された転動体とを有するタッチダウン軸受であって、少なくとも1個の転動体63bの比重又は径を、他の転動体63aの比重又は径と異なるようにする。このように構成することにより、タッチダウン軸受が空転し始まる際、重量または径の異なる転動体が、慣性の違いから隣接する転動体に追いつくか、遅れるかして接触し、そのまま摺勤し続ける。この接触により、タッチダウン軸受の回転エネルギーを減少させ、タッチダウン軸受を早く停止させることができる。
(もっと読む)
浮上体のセンシング方法
【課題】センサ不使用による低コスト化と省スペース化が図れると共に、浮上体位置の検知精度を向上できる浮上体のセンシング方法を提供する。
【解決手段】磁気浮上している浮上体10の周囲に配置され、それぞれコア11、12とコア11、12に巻回されたコイル13、14とを有する複数の電磁石15、16を用いて浮上体10をセンシングする方法であって、各コイル13、14に共振回路17、18を形成するコンデンサ19、20をそれぞれ直列又は並列に設け、各コイル13、14間の電圧から浮上体10の位置を検出する。
(もっと読む)
移動体
【課題】リニアモータの原理を応用し、非接触で車輪を回転させることが可能な移動体の提供。
【解決手段】中空筒状の回転軸を有する車輪5と、車輪5の軸方向の側面に配置されたフレーム6と、車輪5の軸方向の側面に、フレーム6に向かって異種の磁極が車輪5の回転方向に交互に配置されるように設けられた永久磁石群10a,10bと、フレーム6の車輪5側に固定され、車輪5の回転方向に移動する移動磁界を発生させる誘導コイル群12a,12bと、フレーム6に支持され、車輪5の回転軸内に挿入された車軸11と、車輪5の回転軸の内周面および車軸11の外周面に、それぞれ同種の磁極が向かい合わされて配置されるように設けられた永久磁石対15a,15bとを有する。
(もっと読む)
ベアリングレスモータのパラメータ設定方法
【課題】ベアリングレスモータの制御において、軸支持変調式で用いるパラメータを、実際のモータの特性に応じて最適に設定する。
【解決手段】トルク電流指令値(imq*)を順次変化させていき、軸支持電流指令値(isq1*)が0のときの軸支持電流指令値(isd1*)を基に、第1の軸支持側制御系に用いる比例係数KA1,KC1を求め、軸支持電流指令値(isd1*)が0のときの軸支持電流指令値(isq1*)を基に、第1の軸支持側制御系に用いる比例係数KB1,KD1を求め、軸支持電流指令値(isq2*)が0のときの軸支持電流指令値(isd2*)を基に、第2の軸支持側制御系に用いる比例係数KA2,KC2を求め、軸支持電流指令値(isd2*)が0のときの軸支持電流指令値(isq2*)を基に、第2の軸支持側制御系に用いる比例係数KB2,KD2を求める。
(もっと読む)
転がり軸受装置
【課題】タッチダウン時において、転がり軸受が片当たりを繰り返すことを抑制できて転がり軸受が破損することを抑制できると共に、軌道輪の軌道面および転動体に焼付きが発生しにくい転がり軸受装置を提供すること。
【解決手段】ハウジング部材2の内周面に総玉軸受70を締まり嵌めにより内嵌して固定する。総玉軸受70の内輪32の内周面に、形状記憶合金製で周方向に波打つ環状の変形部材52の外周面を固定する。変形部材52の内周面に金属製の円筒部材54の外周面を固定する。
(もっと読む)
磁気軸受制御装置と方法
【課題】ロータの回転周波数と異なる外力が作用する場合でも、その外力の周波数を危険速度を通過させることができる磁気軸受制御装置と方法を提供する。
【解決手段】ロータ11の変位x,yに基づきロータを中立位置に保持するフィードバック制御器22と、ロータの回転周波数に同期する同期周波数ωNに基づきこれに一致する不釣合い力を相殺する同期フィードフォワード制御器24と、ロータの回転周波数に同期しない回転非同期周波数ωFに基づきこれに一致する不釣合い力を相殺する1又は複数の回転非同期フィードフォワード制御器26とを備える。
(もっと読む)
磁気軸受制御装置と方法
【課題】ロータの回転周波数と異なる外力が作用する場合でも、その外力の周波数を危険速度を通過させることができ、回転同期成分以外の周波数帯域の位相を進めることができ、回転体の加減速が早い場合でもトラッキングが外れることがなく、回転同期成分を抽出するPLL(フェーズロックドループ)が不要である磁気軸受制御装置と方法を提供する。
【解決手段】ロータ11の変位x,yに基づきロータを中立位置に保持するフィードバック制御器22と、予め設定した周波数範囲(ωf±Δω)のロータの変位信号x,y又はフィードバック制御器の電流指令信号Ix,Iyのみを抽出する広帯域フィルタ24と、抽出したx軸の入力信号に所定のゲインkをかけてy軸用電磁石12yの電流指令信号Iyに重畳させ、抽出したy軸の入力信号に所定のゲインkをかけてx軸用電磁石12xの電流指令信号Ixに重畳させるクロス回路28とを備える。
(もっと読む)
磁気軸受
【課題】工作機械の振動を低減して、工作機械の加工精度を向上させることができる磁気軸受を提供すること。
【解決手段】主軸2にラジアルロータ80及びアキシャルロータ90が取り付けられており、ラジアルロータ80及びアキシャルロータ90を浮遊状態に保持するXステータ81、Yステータ85及びZステータ91がケース6に取り付けられている。そのXステータ81、Yステータ85及びZステータ91は、それぞれX圧電素子84、Y圧電素子88及びZ圧電素子94を備えており、それら圧電素子は、制御装置7によって制御されることで伸縮される。その伸縮により、ラジアルロータ80及びアキシャルロータ90の浮遊位置が移動され、主軸2に取着されるエンドミルEがケース6に対して移動されるので、フライス盤100の振動を低減してフライス盤100の加工精度を向上させることができる。
(もっと読む)
集合磁石
【課題】 従来の永久磁石10と鉄片等の磁性体11を適切に組み合わせることで、強力な磁力を持つ集合磁石1の製造を実現し、これに伴い、磁石原料の使用量を減らしながら、磁力の強力な磁石を提供し、さらに、前記集合磁石を利用したマグネットカップリングを提供する。
【解決手段】 互いに反発する極性を向かい合わせた少なくとも2つの永久磁石10の間に、前記永久磁石10から発生する磁力を誘導するために任意の一方向に突出した磁力誘導部13Aを設けた磁性体11Aを挟み、前記永久磁石10の外側から前記磁性体11Aと同様の方向に磁力誘導部13Bを設けた磁性体11Bで挟み込んで固定し櫛歯状に構成した。
(もっと読む)
制御型磁気軸受装置
【課題】 アキシアル変位センサとアキシアル磁気軸受の位置が離れていても、主軸の熱膨張によりアキシアル電磁石の制御が不安定になることがない制御型磁気軸受装置を提供する。
【解決手段】 制御型磁気軸受装置は、回転体3が制御型アキシアル磁気軸受4および制御型ラジアル磁気軸受5,6によりハウジング2内に非接触支持されて回転させられるようになされており、回転体3の一端寄りの部分のアキシアル方向の変位を検出するアキシアル変位センサ24がハウジング2に設けられ、アキシアル磁気軸受4が、回転体3の他端側のフランジ状部分16に対向するように配置されてアキシアル変位センサ24の出力に基づいて励磁電流が制御される前後1対のアキシアル電磁石17a,17bを備えているものである。1対のアキシアル電磁石が、ハウジング2に対して軸方向に移動しうるように支持されており、回転体3のフランジ状部分16の熱変位に応じて1対のアキシアル電磁石を軸方向に移動させるアクチュエータ20が設けられている。
(もっと読む)
41 - 60 / 209
[ Back to top ]