
Fターム[3J102DA03]の内容
その他の軸受(磁気軸受、静圧軸受等) (9,013) | 磁気軸受の構造 (1,432) | 固定側と可動側の磁石の対応構造 (1,276) | 半径方向(放射方向)に対向 (210)
Fターム[3J102DA03]の下位に属するFターム
Fターム[3J102DA03]に分類される特許
21 - 40 / 209
ロール装置
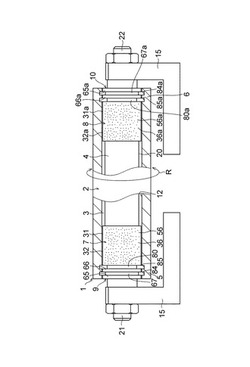
【課題】装置の低廉化、エア消費量の削減を図り得ると共に、部品点数を削減し得、組み立て工数を減少し得、しかも、ラジアル方向の磁気による吸着力が不均一となってラジアル方向の負荷容量が低下する虞をなくし得るロール装置を提供すること。
【解決手段】ロール装置1は、中空のロール体2と、ロール体2の中空部に隙間3をもって挿通されている軸体4と、ラジアル方向に関してロール体2を静圧気体によって支持すべくロール体2と軸体4との間に介在されている静圧気体軸受手段7及び8と、スラスト方向に関してロール体2を磁力によって支持する磁性軸受手段9及び10とを具備している。
(もっと読む)
カムフォロア

【課題】装置の低廉化、エア消費量の削減を図り得るカムフォロアを提供すること。
【解決手段】カムフォロア1は、中空の転動体2と、転動体2の中空部に隙間3をもって挿通されている軸体4と、ラジアル方向に関して転動体2を静圧気体によって支持すべく転動体2と軸体4との間に介在されている静圧気体軸受手段7と、スラスト方向に関して転動体2を磁力によって支持する磁性軸受手段9及び10とを具備している。
(もっと読む)
磁気浮上型回転導入機
【課題】磁性流体シールを使用する必要がない磁気浮上型を採用し、しかも装置としてのアキシャル方向の長さを極力短くすることができるようにする。
【解決手段】回転動力を出力する回転子12を備え、回転子12は、回転子12のラジアル方向に配置されて該回転子12のラジアル方向変位を非接触で制御する2組以上のラジアル磁気軸受40と、回転子12の周囲に3組以上に分割配置されて該回転子12のアキシャル方向変位を非接触で制御するアキシャル磁気軸受50によって、所定の位置に非接触で回転支承され、ラジアル磁気軸受40のラジアル電磁石44とアキシャル磁気軸受50のアキシャル電磁石54は、略同一平面上に配置されてケーシング部14に固定されている。
(もっと読む)
軸方向の調整が可能な磁気ベアリングとこのベアリングの取り付け方法
【課題】磁気ベアリングは、取り付けの間に、多大な注意を要し、特に、磁気ベアリングの種々の構成部品を、構造体に対して非常に精度良く配置することが、しばしば必要である。
【解決手段】環状の本体20は、クランプ手段に関連して設けられている少なくとも1つの径方向のスロットを有し、且つステータ構造体10に面している面にセットバック部分21を有する。前記ステータ構造体10に面している前記環状の本体20の面は、シース13の表面部分14と共動する摺動面23を有しており、前記環状の本体20の前記セットバック部分21は、前記本体20に面している前記シース13の面に形成されている環状の溝15に係合される調整リング30のねじ部分32と共動するねじ部分22を形成している。前記調整リング20は、前記環状の溝15に軸方向に移動しないように防がれる。
(もっと読む)
超電導磁気軸受装置
【課題】 超電導磁気軸受装置のロータの大型化を図り、単位面積あたりの負担荷重を減らすことで、冷却温度の向上を図り得る超電導磁気軸受装置を提供する。
【解決手段】 超電導磁気軸受装置において、ステータとしての超電導磁石3に対応したロータを、超電導線を巻回した大口径で閉ループの超電導コイル4で構成する。
(もっと読む)
磁気浮上式真空ポンプおよびその回転始動方法
【課題】ホールセンサ等のロータ回転位置検出機能を備えることなく、ロータ回転始動時における逆転を防止することができる磁気浮上式真空ポンプの提供。
【解決手段】ラジアル磁気軸受37,38およびアキシャル磁気軸受39により磁気浮上されたロータ30を、モータ36により高速回転して気体の排気を行う磁気浮上式真空ポンプにおいて、モータ駆動開始の前に、ラジアル方向の吸引力がラジアル磁気軸受37,38の中心軸に対して回転する回転磁界であって、ロータ30をモータ回転方向Rと逆方向R2に公転運動させ、かつ、該公転運動に対して進み角を有する回転磁界をラジアル磁気軸受37,38により形成させるようにした。
(もっと読む)
真空ポンプ
【課題】ポンプ運転中にハイレベル信号およびローレベル信号の生成が不安定になるのを未然に防止することができる真空ポンプの提供。
【解決手段】真空ポンプは、ロータと一体に設けられたセンサターゲットと、そのターゲット面とのギャップ変化に応じたセンサ信号を出力するインダクタンス式の回転センサと、センサ信号の電圧レベルとHigh-Low判定用の閾値VL,VHとを比較して、凹凸段差に対応したローレベル信号およびハイレベル信号を生成する回転センサ回路とを備える。電源投入時に、ロータを複数の回転角度位置に順に停止させ、複数の角度位置の少なくとも一つにおいて、センサ信号の電圧レベル(VU〜VW)が判定閾値VL以下となり、かつ、他の角度位置の少なくとも一つにおいて、電圧レベル(VU〜VW)が判定閾値VH以上となる場合に、センサ信号は正常であると判定し、それ以外の場合には異常であると判定する。
(もっと読む)
超電導磁気軸受・磁気浮上装置における制振制御機構
【課題】 本発明は、上記課題を解決するために、超電導磁気軸受・磁気浮上装置の振れ回りや振動を能動的に制御して、振れ回りや振動を低減又は抑制することができる制振制御機構を提供することを目的とする。
【解決手段】 超電導体により非接触支持される被支持体の変位を検知する変位センサーと、前記超電導体を駆動させる駆動手段と、前記駆動手段の駆動を制御する制御手段とを有し、前記変位センサーが検知した前記被支持体の変位量に基づく変位信号を前記制御手段に伝達し、前記制御手段は、前記変位信号に基づいて前記駆動装置の駆動を制御することにより、前記被支持体の振れ回り及び振動を抑制することができる。
(もっと読む)
カムフォロア
【課題】回転摩擦を低減させると共に回転速度を向上させることができ、しかも、使用期間の長期化を図り得ると共にランニングコストをも低減させ得るカムフォロアを提供すること。
【解決手段】カムフォロア1は、中空の転動体2と、転動体2の中空部に隙間3をもって挿通されていると共に一端部21が転動体2から突出している軸体4と、ラジアル方向に関して転動体2を静圧気体によって支持すべく転動体2と軸体4との間に介在されている静圧気体軸受7と、スラスト方向に関して転動体2を磁力によって支持する磁性軸受9とを具備している。
(もっと読む)
磁気浮上装置
【課題】 磁気浮上装置において、磁石ユニットと浮上体間の空隙長を大きく設定でき、電力消費量を低減するとともに、様々な方向の外乱に対して浮上体の位置変動の抑制が図れる磁気浮上装置を提供することにある。
【解決手段】 電磁石と永久磁石で構成される磁石ユニット22を対向配置するように磁石取付け部28に取付け、当該磁石取付け部28をサスペンション30を介して一軸に対して可動とするとともに、制御装置46により磁石ユニット22から鉄製円環48にゼロパワー制御に基づく電磁力を作用させて、この電磁力で浮上体11を磁気浮上させることにより、外力に対する浮上体11の位置変動と非接触支持に必要な電力消費量の増加を抑制できる。
(もっと読む)
ターボ分子ポンプ
【課題】コスト上昇を抑えつつエレクトリカルランアウトを防止できるターボ分子ポンプの提供。
【解決手段】ターボ分子ポンプは、複数段の回転翼32が形成されたロータ30と、回転翼32に対して回転軸方向に交互に配置された複数段の固定翼22と、ロータ30が固定され、モータ36により回転駆動されるシャフト12と、シャフト12を磁気浮上させる磁気軸受37a,37b,38と、シャフト12の磁気浮上位置を検出する渦電流式ギャップセンサ27a,27b,28とを備え、ラジアルセンサ27a,27bの検出対象として非磁性金属から成るターゲット部材13,14と、スラストセンサ28の検出対象として非磁性金属で形成されたロータディスク15とが設けられている。なお、ターゲット部材13およびロータディスク15を、シャフト12に着脱可能に固定するようにしても良い。
(もっと読む)
高速回転装置
【課題】高速回転時の振動発生を抑制すると共に、高速回転体の回転時だけでなく、静止時においても安定な状態に維持する。
【解決手段】回転主軸上にフライホイールを固定して回転体を構成し、該回転体を非接触支持する軸受の固定側をハウジングに取り付ける。この回転体の下端側を非接触支持する軸受として、1つのみの超電導軸受を備える。フライホイールは円板部と、その外周に固定或いは一体形成された円筒部から構成され、かつ、この円筒部は、超電導軸受の外周側に位置して覆うように配置される。
(もっと読む)
エネルギー変換システムおよび方法
エネルギー変換システムは、静止構造体と、静止構造体に対し回転するよう構成され、回転軸を規定する回転可能な構造体とを含んでもよい。システムは、さらに、少なくとも一つのブレード部材と、少なくとも一つの軸受機構とを含んでもよい。少なくとも一つのブレード部材は、回転可能な構造体に取り付けられ、回転可能な構造体から半径方向外側に延び、回転軸と実質的に平行な方向に流れる流体流と相互作用し、回転可能な構造体を回転軸の回りに回転させるよう構成される。少なくとも一つの軸受機構は、回転可能な構造体が静止構造体の周りを回転するとき、回転可能な構造体および静止構造体の間の半径方向支持および軸方向支持の少なくとも一方を提供するよう、配置される。システムは、回転可能な構造体の回転を、電気および水素生成の少なくとも一つに変換するよう構成されてもよい。 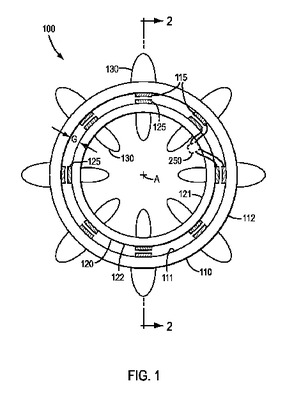 (もっと読む)
(もっと読む)
磁気軸受のための積層コアおよびこのような積層コアの構成方法
ラジアル・アキシアル複合磁気軸受の内部のコアは、それぞれが半径方向の切れ目を少なくとも1つ備えた複数の被膜された層から成るスタックである。これらの切れ目は、スタックの中心孔を通る変動する軸方向制御磁束によって引き起こされる循環電流の誘起を防止する。各層をその前の層に対して特定の角度だけ旋回させることによって、磁気対称性が維持される。この配置は、軸受における損失を減らすだけでなく、軸方向チャネルの性能も向上させる。 (もっと読む)
磁気軸受制御装置と方法
【課題】前回り成分と後回り成分の両方を安定化することができ、複数の周波数帯域の減衰を増加させることが可能な磁気軸受制御装置と方法を提供する。
【解決手段】ロータの変位X,Yに基づきロータを中立位置に保持するフィードバック制御器32と、ターゲット周波数Nfが含まれる予め設定した前回りターゲット周波数帯域に一致するロータの前回り変位信号のみを抽出するFクロス制御フィルタ36A,36Bと、ターゲット周波数Nbが含まれる予め設定した後回りターゲット周波数帯域に一致するロータの後回り変位信号のみを抽出するBクロス制御フィルタ37と、抽出したx軸の入力信号に所定のゲインkをかけてy軸用電磁石の電流指令信号Iyに重畳させ、抽出したy軸の入力信号に所定のゲインkをかけてx軸用電磁石の電流指令信号Ixに重畳させるクロス回路38A〜38Cとを備える。
(もっと読む)
真空排気ポンプ
【課題】構成を簡単にでき、コンパクト化が図れ、メンテナンスフリーでクリーンな真空排気ポンプを提供する。
【解決手段】中央に配置されたシャフト11及びその周囲に取付けられた動翼12を有するロータ13と、ロータ13を囲むケーシング14及びケーシング14の内側に設けられた静翼15を有するステータ16と、シャフト11を回転自由に支持する軸受とを備える真空排気ポンプ10であり、軸受に超電導磁気軸受17、18が使用され、かつステータ16を冷却する冷媒に、超電導磁気軸受17、18に用いる冷媒が使用されている。
(もっと読む)
電磁軸受を利用するターボ機械の予備機械軸受のクリアランスを決定する装置および方法
電磁軸受を利用したターボ機械の予備機械軸受のクリアランスおよび摩耗を決定する装置および方法である。シャットダウン中、または電源喪失中の破局的な障害の可能性を低下させるために、回転装置は、電磁軸受を利用してシャフトを操作して、予備機械軸受のクリアランスを測定する。電力が回復したときに、プログラム可能制御装置が、電磁軸受に電力を供給して、所定のシーケンスに従ってシャフトを自動的に移動させ、予備機械軸受と接触させて、予備機械軸受のクリアランスを決定する。これらの値は、制御装置のメモリに記憶される。測定したクリアランスを、以前に測定した予備機械軸受のクリアランスの測定値と比較して、予備軸受の摩耗を決定する。実際の摩耗を、軸受の許容可能な摩耗と比較する。実際の摩耗が所定値を超える場合には、警告を生成する。実際の摩耗が許容可能な摩耗と等しい、またはこれを超える場合には、制御装置は、修理または交換が行われるまで、自動的にターボ機械をロックして、それ以上の動作を妨げる。そうでない場合には、制御装置は、シャフトを心出しして、ターボ機械が通常動作できるようにする。 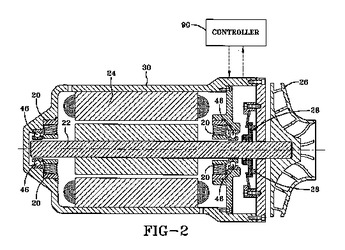 (もっと読む)
(もっと読む)
磁気軸受装置、およびそれを備える真空ポンプ
【課題】従来よりもコストを抑えながら回転体の接触面の摩耗の増大を抑えるとともに、保護軸受の寿命を延ばすことが可能な磁気軸受装置、およびそれを備える真空ポンプを提供する。
【解決手段】本発明の磁気軸受装置は、回転体10と、回転体10の周囲に設けられ、回転体10を回転自在に非接触で支持する磁気軸受(30、40、50)と、回転体10の周囲に設けられ、磁気軸受(30、40、50)が回転体10を支持しないときに回転体10を支持する保護軸受(21、22)と、回転体10と対向する保護軸受(21、22)の内輪側に設けられ、回転体10の軸方向に伸びる溝が回転体10との対向面に形成された保護部材(71、72)と、を備える。
(もっと読む)
磁気軸受装置
【課題】 タッチダウン軸受の耐久性が低下するのを抑制することができる磁気軸受装置を提供する。
【解決手段】 回転体Aの重心G位置付近を接触支持するタッチダウン軸受10の外輪15を調心輪18の内周に取り付ける。調心輪18の外周には重心G位置と同心に凸状球面18aを形成し、この凸状球面18aを球面座19の内周面に形成した凹状球面19bに対して摺動可能に当接させる。磁気軸受8,9の制御不能により回転体Aの回転軸3が重心G位置を中心として歳差運動するときに、調心輪18を傾動させてタッチダウン軸受10を回転軸3に追従させて傾動させる。
(もっと読む)
真空ポンプ
【解決手段】本発明は、真空ポンプ、特にターボ分子ポンプに関しており、真空ポンプは軸(12)に支持されたポンプ要素(14)を備えている。軸(12)は、第1の軸受組立体(24)と第2の軸受組立体(26)とによりポンプハウジング(10)内に支持されている。動作中に生じる軸(12)とポンプハウジング(10)との熱膨張の差を補償するために、第1の軸受組立体(24)は、軸方向の移動を少なくとも部分的に補償するための補償要素(32)を有する。 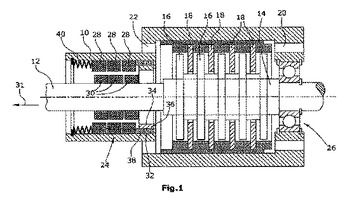 (もっと読む)
(もっと読む)
21 - 40 / 209
[ Back to top ]