
Fターム[3J552RB25]の内容
伝動装置(歯車、巻掛け、摩擦)の制御 (81,513) | 車両走行状態 (2,755) | 悪路走行時(凸凹路等) (35)
Fターム[3J552RB25]に分類される特許
1 - 20 / 35
作業車両
【課題】ラグが大きく、排土性の高いタイヤ又はクローラを備えた作業車両において、ラグによる振動ならびに騒音を抑制することができる技術を提供する。
【解決手段】エンジン2の回転動力によって駆動される無段変速装置31と、前記無段変速装置31によって駆動されるタイヤ4・4・6・6又はクローラ17・17と、前記無段変速装置31を制御することによって前記タイヤ4・4・6・6又はクローラ17・17の駆動状態を変更させる制御装置9と、を備えた作業車両100であって、振動加速度Gを検出するとともに前記制御装置9へ検出信号を送信する振動センサ91を具備し、前記制御装置9は、振動加速度Gが所定の値Glよりも大きい場合に前記タイヤ4・4・6・6又はクローラ17・17のラグRによる振動周波数が所定の固有振動数の共振発生領域にあると判断し、前記無段変速装置31を制御して走行速度Vを変更させる、とした。
(もっと読む)
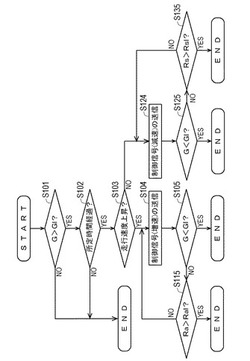
車両用発進制御装置

【課題】駆動トルク抑制の制御など、従来の一方向のみの制御方法では効果が及ばず、やむを得ずスタックしてしまった車両を、新規の手段で脱出可能とする制御装置を提供すること。
【解決手段】スタックしてしまった車両を、まず前進駆動させ(S102)、車体移動状態判定手段により、前進パルスの立ち上がりがなければ(S106)後進駆動に切り替え(S108)後進させ、同じように後進パルスの立ち上がりがなければ(S110)S102に戻り前進駆動させる。
(もっと読む)
車両用自動変速機の制御装置
【課題】駆動輪側からの逆入力に伴う合成イナーシャトルクを抑制する。
【解決手段】ロックアップクラッチ26の解放に伴うエンジンイナーシャトルクTEiが駆動輪24側からの逆入力に伴う変速機イナーシャトルクTCVTiと逆位相となるようにロックアップクラッチ26が解放されるので、例えば変速機イナーシャトルクTCVTiの少なくとも一部をエンジンイナーシャトルクTEiにより相殺することができる。つまり、駆動輪24側からの逆入力に伴う、エンジンイナーシャトルクTEiと変速機イナーシャトルクTCVTiとの合成イナーシャトルクTinaのピーク値を抑制することができる。よって、例えば駆動輪24側からの逆入力を想定したベルト挟圧Pd、前進用クラッチC1や後進用ブレーキB1などの係合装置の係合圧Pc、又はベルト挟圧Pdや係合圧Pcの元圧となるライン油圧PLを下げることが可能となり、燃費を向上することが可能となる。
(もっと読む)
動力伝達装置の制御装置
【課題】摩擦係合装置の耐久性を向上させることを課題とする。
【解決手段】動力伝達装置の制御装置は、エンジンなどの動力源から出力された動力を駆動輪などに伝達する動力伝達装置に適用される。動力伝達装置は、トルクリミッタと摩擦係合装置とを備える。動力伝達装置では、例えば、摩擦係合装置の係合又は解放を行うことにより変速が行われる。動力伝達装置の制御装置は、制御手段を備える。制御手段は、共振時、係合状態にある摩擦係合装置における油圧を上昇させることにより係合力を上昇させる。このようにすることで、摩擦係合装置の耐久性を向上させることができる。
(もっと読む)
車両制御装置
【課題】運転者の違和感を低減してドライバビリティを向上させる。
【解決手段】本発明の車両の制御装置40は、運転者により所定の加減速操作がなされているか否かを判定する加減速判定部61と、動力伝達経路のうち遊びのある係合部分36a,37aに対して動力伝達上流側にある入力軸24と、係合部分36a,37aに対して動力伝達下流側にある出力軸28との相対回転位置X及び相対回転速度Vの少なくとも一方の値を検出する動力伝達状態検出部62と、加減速判定部61により前記加減速操作がなされていると判定された場合には、動力伝達状態検出部62により検出された値に応じて、動力伝達部材36,37間の接触速度及び伝達トルクの少なくとも一方が小さくなるように入力軸24又は出力軸28を加減速させる加減速制御を実行する加減速制御部63とを備えている。
(もっと読む)
前後加速度制御装置
【課題】推定勾配トルクの算出精度が低下しても、フィードフォワード制御の精度の低下を抑制できるようにする。
【解決手段】推定勾配信頼度を演算すると共に、この推定勾配信頼度に応じてフィードバックトルクを補正する。推定勾配信頼度が低ければフィードバック制御器3fのゲインが高くなるようにすることができ、推定勾配信頼度に応じた補正後フィードバックトルクを演算することができる。したがって、推定勾配トルクの信頼度が低下し、フィードフォワードトルクの精度が低下しても、推定勾配信頼度に応じてフィードバックトルクを補正することにより、フィードフォワードトルクの精度低下を補完することが可能となる。よって、推定勾配トルクの算出精度が低下しても、総合的に、フィードフォワード制御の精度の低下を抑制できる。
(もっと読む)
オーバーフローチューブの取付構造
【課題】石などの異物が接触した衝撃力でオイルパンが大きく変形しないようにする。
【解決手段】変速機ケース30のオイルパン40の底部42を貫通して、オイルパン40の底部42から鉛直方向上方に延びるオイル給排路13を有する筒状の本体部10と、オイル給排路13とオイルパン40の内部の空間Sとを連通する連通孔14と、オイルパン40の外部でオイル給排路13の下部の開口を塞ぐボルト20と、を備えるオーバーフローチューブ1の取付構造であって、コントロールバルブボディ50を変速機ケース30に固定するボルト35の軸線上に本体部10を設けると共に、オイルパン40の空間S内に位置する本体部10の先端部11を、ボルト35に当接させた構成とした。
(もっと読む)
作業車両
【課題】走行中に走行速度を必要に応じて簡易な操作により微調節することが可能な作業車両を提供する。
【解決手段】HST82と、変速用アクチュエータ82aと、主変速レバー94と、主変速操作量検出手段94aと、調速用アクチュエータ71bと、アクセルレバー93と、アクセル操作量検出手段93aと、フットペダル95と、フットペダル操作量検出手段95aと、走行速度検出手段101と、主変速レバー94の操作量に基づいて走行速度Vを調節するとともに、アクセルレバー93の操作量に基づいて走行速度Vを調節する一方、フットペダル操作量検出手段95aによりフットペダル95が操作されたことを検出した場合、フットペダル95の操作量に基づいて補正率Rを算出し、変速用アクチュエータ82aを動作させることで補正率Rだけ走行速度Vを変化させる制御手段100と、を具備した。
(もっと読む)
車両のクラッチ制御装置
【課題】ドグクラッチの断接時に、駆動輪の回転数変動により、ギヤ鳴り、破損、変速ショックの発生を抑制可能な車両のクラッチ制御装置を提供すること。
【解決手段】車両状態検出手段が検出する車両状態に応じて、自動変速機ATの変速を制御するとともに、自動変速機ATの変速中は、ドグクラッチ構造の第2クラッチCL2を切断状態とするとともに、変速終了後に、噛合状態とする指令を行なう統合コントローラ14を備えた車両のクラッチ制御装置であって、統合コントローラ14は、左右駆動輪LT,RTの回転速度の変化が、あらかじめ設定された変速制限状態である場合は、変速を制限する変速制限判定処理を実行することを特徴とする車両のクラッチ制御装置とした。
(もっと読む)
車両の変速制御装置
【課題】 低摩擦係数路面で後進走行レンジから前進走行レンジにシフトチェンジする際に、前後進切替機構のスムーズな作動および保護を図る。
【解決手段】 リバースレンジにおいて駆動輪のスリップ状態が検出された後に、リバースレンジからDレンジにシフトチェンジされたとき、1速ドリブンギヤをカウンタシャフトに結合すべくチャンファ機構の油圧サーボに供給する液圧を基準液圧よりも加算値QINGICEだけ増圧するとともに、液圧サーボに液圧を供給するタイミングΔTだけ早めるので、路面摩擦係数が小さいために、Dレンジにシフトチェンジした後にチャンファ機構の差回転がゼロになるタイミングが早まっても、そのタイミングに合わせてチャンファ機構を早期に作動させることが可能となり、1速変速段のスムーズな確立とチャンファ機構の耐久性向上とか可能となる。
(もっと読む)
無段変速機の変速制御装置
【課題】実アクセル開度と変速制御用アクセル開度との間のヒステリシスが、運転者の意図や車両の負荷状況等の運転状態に応じた最適な値となる無段変速機の変速制御装置を提供する。
【解決手段】本発明は、実アクセル開度APO(a)に応じて変速制御用アクセル開度APO(c)を設定し、当該アクセル開度APO(c)に基づいた変速制御を行う無段変速機の変速制御装置において、実開度APO(a)と制御用開度APO(c)との間のヒステリシスhを、車速VSP、燃費性能及び動力性能の運転状態に応じて変更する。
(もっと読む)
車両の走行制御装置
【課題】車速を微低速目標車速に維持する微低速走行制御と自動変速機を第1速ギヤ段よりも高速側に切り換えて走行するスノー路面モードを有するオフロード走行制御とを同時に実行することができる車両の走行制御装置を提供する。
【解決手段】自動変速機22を第1速ギヤ段に固定して車速Vが予め設定された微低速目標車速Vmに維持されるように駆動輪の駆動力および制動力を制御する微低速走行制御手段140と、自動変速機22を第1速ギヤ段よりも高速側に切り換えて走行するスノー路面モードを有するオフロード走行制御手段136とを備えた車両の走行制御装置であって、微低速走行制御手段140は、オフロード走行制御の実行中に上記スノー路面モードが選択されているときには、自動変速機22を第2速ギヤ段に固定するものである。
(もっと読む)
移動農作業機の変速操作装置
【課題】 農作業走行の土壌条件によって、車体の沈下が著しい場合があり、作業はもとより走行不能状態に至ることがある。又、逆に車体の沈下が少ない土壌面での走行では、走行負荷が小さく加速し易いため、この車速の加速は制限されるのが望ましい。
【解決手段】 走行しながら対地作業する移動農作業機において、車体の沈下量の検出に基づいて、この沈下量が大きいときは、変速スイッチ2の操作による変速アクチュエータ3の変速操作の速さを速くし、又、沈下量が小さいときは、この変速操作の速さを緩くする構成とする。
(もっと読む)
無段変速機の制御装置および無段変速機の制御方法
【課題】スリップが発生した場合その後のグリップ回復時のショックが軽減された無段変速機の制御装置および無段変速機の制御方法を提供する。
【解決手段】無段変速機の制御装置は、駆動輪のスリップを検出するスリップ検出部(車輪速センサ440,Gセンサ442)と、検出部によって駆動輪のスリップが検出された場合には、スリップが検出されていない場合と比較して、変速比を増速側に変化させる制御部1000とを備える。好ましくは、制御装置は、車体速を検出する車体速検出部(車輪速センサ441)をさらに備える。制御部1000は、駆動輪のスリップが検出された場合には、変速比を車体速検出部で検出された車体速に対応する目標変速比に近づけるように、変速比を変化させる。
(もっと読む)
トランスミッション制御装置
【課題】パワートレインへ過大トルクが入力するのを抑制することにより、パワートレインを保護することができるトランスミッション制御装置を提供する。
【解決手段】エンジン12とファイナルドライブ16の間に位置するトランスミッション13に備えられ、車輪空転時に該車輪空転が収束したときにトランスミッション13およびファイナルドライブ16からなるドライブトレインに過大トルクが発生する車両走行状態であるかを推定する走行状態推定手段(トランスミッション制御装置10)と、走行状態推定手段により得られた走行状態推定情報に基づき、ドライブトレインへの過大トルクの入力が発生すると推定したとき、トランスミッション13の変速比を高変速比側に変速する変速制御を行う変速制御手段(トランスミッション制御装置10)とを有する。
(もっと読む)
作業車両の走行変速装置
【課題】本発明は、単なる路上走行の際には、走行開始の変速段を最低速以外の適宜変速段に設定して発進するようにして、発進から所望走行速度に達するまでの時間を短縮できるようにすること課題とする。
【解決手段】走行速度を少なくとも路上走行速度に設定する走行種別設定手段18と変速段設定手段33,34を設け、走行種別判定手段18の走行種別を路上走行にした場合には、前記変速段設定手段33,34で発進時の走行開始変速段を変更可能に構成したことを特徴とする作業車両の走行変速装置の構成とする。
(もっと読む)
機械式自動変速機の変速制御装置
【課題】 発進時などに変速制御装置により行われる自動変速操作の完了を検知できない場合でも、変速制御装置による自動的な変速制御を継続して利便性を向上させる。
【解決手段】 S11に進む場合は、変速制御装置200が変速操作完了信号を検知できない場合で、かつ、発進時であり、従来は、この段階で変速制御装置200による変速制御を停止するが、本発明では停止することなく、暫定的に自動変速操作が完了したことを示す暫定終了フラグを1にセットしてS12へ進み、正常時と同様にクラッチ機構10を接続する。その後、車速が上がれば、変速ギア位置を推定して変速制御装置200による変速制御を継続し、変速終了判定が成立しない場合は、内周スプライン溝151とシンクロコーン142の外周歯143が係合できず自動変速操作を一時的に完了できない状態であるとして、S1へ戻り、再度クラッチ機構10を切断して自動変速操作を試みる。
(もっと読む)
無段変速機
本発明は無段変速機の制御構成に関する。この変速機は変動器駆動比に対応する位置を備える可動トルク伝達部分(ローラ18)を有する変動器(10)を含む。液圧アクチュエータ(28)はトルク伝達部分上に調整可能な力を与えるように配列される。この変速機は更に(a)トルク伝達部分の現在の位置及び(b)トルク伝達部分のための要求される位置を受け取るように配列された流れ制御構成を有する。要求される位置はたとえば運転手入力により決定することができる。流れ制御構成は、液圧アクチュエータに連通する供給出口を通して、2つの制御入力間の誤差に従って変調された流体の流れを供給するようにされる。流体の流れは誤差の増大と共に増大する。逃し通路(110)は出口から圧力貯めへ通じ、そこを通る流体流れが逃し通路を通る流量に対応する量だけ圧力貯めの圧力よりも大きな圧力を生じさせるように、絞られる。その結果は、トルク及び比制御の双方の利点のいくつかを所有する変速機の制御モードとなる。  (もっと読む)
(もっと読む)
路面状態検出装置および無段変速機の制御装置
【課題】路面状態を正確に判定して実際の路面状態に適した無段変速機の挟圧力の制御を可能にする。
【解決手段】トルク伝達部材を挟み付ける挟圧力に応じてトルク容量が変化する無段変速機が、動力源と駆動輪との間に配置され、前記無段変速機の出力回転数もしくは無段変速機の出力側に連結されている駆動輪を含む回転部材の回転数の路面状態に応じた変化に基づいて前記無段変速機を制御する路面状態の検出および無段変速機の制御をおこなう装置であって、前記回転数の検出値をバンドパスフィルタ処理する処理手段(ステップS2)と、そのバンドパスフィルタ処理して得た値を時間窓積分する積分手段(ステップS4)と、その時間窓積分値に基づいて路面状態を判定する路面状態判定手段(ステップS11)とを備えている。
(もっと読む)
車両の駆動力制御装置
【課題】エンジン2やモータ等の少なくともいずれか一方で発生される回転動力を変速機3で変速して車輪6(FL,FR,RL,RR)に駆動力として伝達する車両1の駆動力制御装置(20)において、車輪6がジャンプしてから着地するときに駆動系にかかる負荷を軽減可能とする。
【解決手段】ジャンプしてから着地するまでの間にブレーキ7(FL,FR,RL,RR)が一時的に作動されたときに、ジャンプ中における駆動系の回転数を、ジャンプ前における駆動系の回転数に近似させるように制御する。要するに、ジャンプ中のブレーキ作動について、制動する意思がないパニックブレーキが行われたと推定したときに、着地時に車輪6の回転速度を車速に適合させるようにしており、それによって着地時に車輪6に増速方向や減速方向の力が作用しにくくなる。
(もっと読む)
1 - 20 / 35
[ Back to top ]