
Fターム[3J552VA39]の内容
伝動装置(歯車、巻掛け、摩擦)の制御 (81,513) | 伝動装置からの情報 (9,884) | 変速機出力軸状態 (1,010) | トルク (130)
Fターム[3J552VA39]の下位に属するFターム
変化率 (7)
Fターム[3J552VA39]に分類される特許
1 - 20 / 123
車両の制御装置
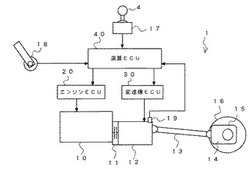
【課題】車両の制御装置に関し、エンジンの燃費を効果的に向上させる。
【解決手段】アクセルセンサ18と、回転数センサ19と、シフトポジションセンサ17と、変速機出力回転数と出力トルクとに対応する座標平面上に等アクセル開度線が設定された第1のマップから変速機出力トルクを設定する変速機出力トルク設定部41と、変速機出力回転数と変速機出力トルクとに基づいてエンジン出力を算出するエンジン出力演算部42と、エンジン出力とエンジン回転数とに対応する座標平面上に複数本の最適エンジン回転数線が設定された第2のマップから目標エンジン回転数を設定する目標エンジン回転数設定部43と、変速機出力回転数と目標エンジン回転数とに基づいて目標変速比を算出する目標変速比演算部44と、変速比が目標変速比となるように変速機12を制御する変速機ECU30とを備えた。
(もっと読む)
トルク推定装置及びトルク推定方法

【課題】偏心量に対する変速比の特性が幾何学的に非線形な無段変速機における入力トルク及び/又は出力トルクを高い精度で推定するトルク推定装置を提供すること。
【解決手段】四節リンク機構式の無段変速機におけるトルクを推定するトルク推定装置は、動力源からの回転動力による無段変速機の入力側の回転数である入力回転数と、無段変速機の出力側の回転数である出力回転数と、無段変速機に設定されている偏心量とに基づいて、無段変速機の変速比毎に異なるトルクと偏心量の関係から、無段変速機に入力されるトルクである入力トルク及び/又は無段変速機が出力するトルクである出力トルクを推定する。
(もっと読む)
無段変速機の挟圧制御装置
【課題】 ベルト式無段変速機の無端ベルトのスリップを防止しながら動力伝達効率の向上を図る。
【解決手段】 無端ベルトのスリップを防止するための両プーリの何れか一方の必要軸推力を求め、推定したトルク比と目標トルク比との偏差に基づく補正係数により必要軸推力を補正し、補正した必要軸推力に基づいて何れか一方のプーリの側圧を制御するので、ベルト式無段変速機の定常運転時には、トルク比のフィードバックにより必要軸推力の推定値の誤差が吸収されてプーリ側圧の制御精度が向上するだけでなく、ベルト式無段変速機の伝達トルクの変化時のようにプーリ側圧を瞬時に応答させる必要が生じた場合には、フィードフォワード制御により必要軸推力が瞬時に応答することで無端ベルトのスリップを防止することができ、制御精度および制御応答性の両立が可能になる。
(もっと読む)
無段変速機
【課題】高負荷域及び高回転域においてミスアライメントを小さくすることができる無段変速機を提供すること。
【解決手段】プライマリシャフト31に設けられたプライマリプーリ34と、セカンダリシャフト32に設けられたセカンダリプーリ35と、両プーリ34,35間に巻き掛けられたベルト33とを備え、各プーリ34,35間におけるベルト33の巻き掛け半径を変更されることにより、無段階の変速が行われる無段変速機30において、変速比が大きい高負荷域にて、出力トルクが大きくなるに従って各プーリ34,35における各溝の中心線のズレ量を調整するための調整幅を大きくしてズレ量を小さくするズレ量調整機構100を有する。
(もっと読む)
運転支援装置
【課題】運転支援装置に関し、周囲の走行環境の変化に応じた協調的な安定走行を実現する。
【解決手段】変速機19を搭載した車両の運転支援装置において、変速比に応じた駆動輪の最大トルクと、走行状態に応じて駆動輪に要求される要求トルクとを演算する演算手段3を設ける。
また、車両の周囲の他車両の走行状況を検出する検出手段2を設ける。
さらに、演算手段3で演算された最大トルク及び要求トルクと、検出手段2で検出された走行状況とに基づき、変速比の変更の要否を判定する判定手段4を設ける。
(もっと読む)
車両用変速制御装置
【課題】エンジン性能の全域で省燃費モードでの走行を可能とし、運転者の意志に応じて駆動力が必要なときには、運転者に負担を与えることなく簡易に省燃費モードの走行から駆動力モードの走行への切替えが可能な車両用変速制御装置を提供する。
【解決手段】燃費を重視する変速線上に、アクセルペダル14の開度の変化に関わらず、エンジントルクが燃費を重視する変速線上における略最大値に維持される非連動アクセルペダル開度領域NRと、非連動アクセルペダル開度領域NRに含まれるアクセルペダル開度よりも小さい開度を有するアクセルペダル開度領域に、連動アクセルペダル開度領域Rとが設定される。連動アクセルペダル開度領域R内では最小のエンジントルク特性から略最大のエンジントルク特性まで燃費を重視した走行を可能とし、非連動アクセルペダル開度領域NR内では、燃費を重視する走行から駆動力を重視する走行をアクセルペダル14の操作により任意に選択可能とする。
(もっと読む)
車両のトランスミッションの切替過程中に牽引力に影響を与えるための方法及び装置
【課題】異なる車軸に作用する複数の駆動システムを備えた車両における切替の快適性を向上させる。
【解決手段】少なくとも2つの駆動車軸を有する車両のトランスミッションの切替過程中に牽引力に影響を与えるための装置及び方法に関する。第1の車軸の駆動システムが、トランスミッションの切替過程時に第2の車軸で生じる牽引力の中断を少なくとも部分的に補償するように制御され、第2の駆動車軸における有効トルクの変更が、できるだけ牽引力の下降及び上昇なしに、特にこれに伴い感じられる衝撃なしに行われることを保証するために、切替の希望に応じてクラッチの制御を遅らせる。
(もっと読む)
無段変速機の変速制御装置
【課題】目標変速比が無用に制限されて、実際に採用できる変速比幅を不当に狭めてしまうことを防止できる無段変速機の変速制御装置を提供する。
【解決手段】一対のプーリー11,12に掛け回された無端トルク伝達部材13を介して一対のプーリー間で変速する無段変速機の変速制御装置において、変速機の目標変速比を算出する目標変速比算出部B51と、プーリー推力及びプーリー回転速度の少なくともいずれか一方と、変速機に入力されるトルクと、に基づいて目標変速比の制限値を算出する制限値算出部B52〜B54と、目標変速比算出部で算出された目標変速比算出値が制限値を越えれば、制限値を目標変速比として設定し、目標変速比算出値が制限値を越えなければ、目標変速比算出値を目標変速比として設定する目標変速比設定部B55と、を有する。
(もっと読む)
無段変速機の変速制御装置及び制御方法
【課題】無端トルク伝達部材の伸びによる変速比フィードバック制御の応答遅れを解消する。
【解決手段】無段変速機は一対のプーリに掛け回された無端トルク伝達部材を介して一対のプーリ間で変速を行う。変速制御装置はプーリ間の実変速比が目標変速比に追随するようにフィードバック制御する。変速制御装置は無端トルク伝達部材の伸びの有無が実変速比の目標変速比への到達を不可能にする伸び依存変速条件が成立するかどうかを判定し、伸び依存変速条件が成立する場合に、変速比フィードバック制御を制限する。
(もっと読む)
自動変速機の変速ショック軽減装置
【課題】トルクフェーズでのトルク低下ショックを変速機入力トルクの増大により軽減するに際し、トルクフェーズの開始を変速機入力トルクの増大に調時させる。
【解決手段】変速開始時t1より、解放側クラッチH&LR/Cを作動圧指令値Po_oに追従する実圧Poの低下で解放させ、締結側クラッチD/Cを作動圧指令値Pc_o(実線)に追従する実圧Pc(破線)の上昇で締結させる。H&LR/CおよびD/Cの掛け替えによる1→2アップシフト時のトルクフェーズで生ずるトルク低下をt3におけるモータトルクTmの増大で相殺して変速機出力トルクToを実線t1での値To1に保ち、変速ショックを軽減する。Pcがα1またはα2のようにずれてToがβ1またはβ2になるとき、Pc_oのプリチャージ圧をγ1またはγ2に補正し、α1またはα2が破線特性になるようにし、D/Cの締結開始をモータトルクTmの増大タイミングt3に一致させる。
(もっと読む)
動力列制御装置
【課題】自動車の動力列のための制御装置を提供する。
【解決手段】無限可変変速機及びエンジンを有する自動車の動力列を作動させる制御装置。変速機は、エンジンに結合された回転変速機入力、車両の車輪に結合された回転変速機出力、連続可変比(「変動器比」)を提供する変動器、及び、変速機入力の速度に対する変速機出力の速度の比(「往復変速機比」)が変動器の関数となるように、エンジンと変速機出力との間で変動器を結合するための歯車装置を有する。変動器比の利用可能な範囲は前進及び後退用の往復変速機比の双方に対してマップ化され、特定の変動器比(「減速中立比」)において、変速機出力は、変速機を介して回転変速機入力に結合されているにも拘らず、静止状態となる。
(もっと読む)
車両用変速機の摩擦係合要素のトルク特性マップ修正装置
【課題】車両個体差に応じてトルク特性マップを適切に学習でき、ひいては学習したトルク特性マップに基づき摩擦係合要素を最適制御できる車両用変速機の摩擦係合要素のトルク特性マップ修正装置を提供する。
【解決手段】クラッチの目標伝達トルクから電磁弁の駆動電流を算出するための特性線Sを有するトルク特性マップを設定すると共に、このトルク特性マップ上で学習点として2つの伝達トルクT1,T2を設定し、クラッチの伝達トルクが各伝達トルクT1,T2になったときの実際の駆動電流IA,IBを学習し、これらの2つの学習値IA,IBに対して特性線から算出されたT1,T2での駆動電流I1,I2を一致させるように、傾きを変更しつつ特性線Sをオフセットさせる。
(もっと読む)
自動変速機の制御装置
【課題】変速時の車両加速度を評価して摩擦係合要素の伝達トルクのばらつきなどを学習によって吸収すると共に、自動変速機の運転経過時間に応じて適正に学習するようにした自動変速機の制御装置を提供する。
【解決手段】車両加速度(I相初期)Gが目標とする所定の範囲(ある幅)に入るように摩擦係合要素(油圧クラッチCn)の制御量を補正する補正する補正量(学習Δトルク)を学習によって算出する自動変速機(トランスミッション)の制御装置であって、自動変速機の運転経過時間を推定すると共に、推定された運転経過時間に応じて補正量を持ち替える(S504からS534)。
(もっと読む)
動力伝達装置の制御装置
【課題】摩擦係合装置の耐久性を向上させることを課題とする。
【解決手段】動力伝達装置の制御装置は、エンジンなどの動力源から出力された動力を駆動輪などに伝達する動力伝達装置に適用される。動力伝達装置は、トルクリミッタと摩擦係合装置とを備える。動力伝達装置では、例えば、摩擦係合装置の係合又は解放を行うことにより変速が行われる。動力伝達装置の制御装置は、制御手段を備える。制御手段は、共振時、係合状態にある摩擦係合装置における油圧を上昇させることにより係合力を上昇させる。このようにすることで、摩擦係合装置の耐久性を向上させることができる。
(もっと読む)
車両用変速装置
【課題】ニュートラル状態から、運転者の要求駆動力が増加し加速運転状態となった後、変速段が形成されるまでの期間を短縮することができる車両用変速装置を提供する。
【解決手段】エンジンEに駆動連結される入力部材Iと、車輪18に駆動連結される出力部材Oと、複数の係合要素により形成される複数の変速段を備え、各変速段の変速比で入力部材Iの回転速度を変速して出力部材Oに伝達する変速機構TMと、変速機構TMの制御を行う制御装置31と、を備えた車両用変速装置1であって、制御装置31は、車両が走行状態であって且つ変速機構TMがニュートラル状態である空走状態から、変速段を形成して実走行状態に移行する際に、車速及び運転者要求に応じた1つの最終目標変速段と、より変速比が小さい中間目標変速段と、を決定し、中間目標変速段を形成した後に最終目標変速段を形成する制御を行う。
(もっと読む)
動力伝達装置およびその制御方法
【課題】入力部材の変形を抑制する。
【解決手段】インプットシャフトに接続されたインプットコーンとアウトプットシャフトに接続されたアウトプットコーンとを互いに逆向きに配置し、アウトプットシャフトに作用するトルクをアウトプットシャフト方向の力に変換する狭圧力調節機構によってアウトプットシャフトに作用するトルクが大きいほど大きな狭圧力でリングが狭圧される無段変速機を備えるものにおいて、リングの位置がアウトプットコーンの大径側端部である出力部材最大径時に、アウトプットシャフトに作用するトルクとしての出力トルクToutが閾値Tref以上のときには(S120)、リングをアウトプットコーンの小径側にスライドさせる(S130,S140)。
(もっと読む)
変速機構の制御装置およびその制御方法
【課題】アイドルストップ制御から復帰する場合に運転者に与える違和感を低減した変速機構の制御装置を提供する。
【解決手段】エンジンを自動停止するアイドルストップ制御から復帰する場合に、Lowブレーキが完全締結状態となり、Highクラッチが完全に締結しないスリップインターロック状態となるように油圧を供給する(S201)。
(もっと読む)
可変伝動機
【課題】定馬力伝動型のベルト連続可変伝動機では出力回転数や速比とトルクの二制御機能は不可欠でしかも速比とトルクの同期操作以外に単独操作させて周囲温度変化や経年変化に依る速比又はトルクの誤差補償や低速域及び高速域での摩擦力過剰と摩擦力不足に対する効率補償を可能にさせた伝動機構を実現することである。
【解決手段】速比及びトルクに二つの制御機能を入力及び出力車加圧用の二つの加圧装置に相互配置ししかも調節装置の供給指令からプーリ可動車までの指令供給系路を速比とトルクとでは互に完全分離区分して個別化する思想であり、速比又はトルクの誤差補償の外に伝動機休止中の弾性体高圧縮状態を解放する指令操作を可能にする思想である。
(もっと読む)
発進クラッチ制御装置
【課題】 登坂発進時など連続ストール状態が継続することによるクラッチの劣化と、燃費の低下を防止することができる発進クラッチ制御装置を提供する。
【解決手段】 発進クラッチの駆動軸と被駆動軸との回転数の差、及びクラッチに作用する圧力に基づいて、累積仕事量を算出する。発進クラッチが締結過渡状態にあって前記累積仕事量が第1の所定値を超えたときに、エンジンの出力トルクを制限する。
(もっと読む)
無段変速機の制御装置
【課題】動力の伝達効率を可及的に大きくすることのできる無段変速機の制御装置を提供する。
【解決手段】CVT5は、ドライブプーリ13と、ドリブンプーリ14と、各プーリ13,14に巻き掛けられたベルト15と、ベルト15をクランプするためのクランプ力を各プーリ13,14に与える油圧シリンダ16,17とを備える。各油圧シリンダ16,17の駆動によりプーリ径比を変更して変速比を無段階で変更可能である。CVT5の制御装置50の制御部40は、CVT5の伝達効率ηに基づいて、伝達効率ηが最大となるドリブンプーリ14の目標クランプ力Fstを設定し、設定された目標クランプ力Fstに基づいてドリブンプーリ14のクランプ力Fsを制御する。
(もっと読む)
1 - 20 / 123
[ Back to top ]