
Fターム[3J552VB12]の内容
伝動装置(歯車、巻掛け、摩擦)の制御 (81,513) | 車両からの情報 (3,501) | 距離 (121) | 車間距離 (64)
Fターム[3J552VB12]に分類される特許
1 - 20 / 64
無段変速機の制御装置
【課題】アクセルペダルが踏み込まれた後に緩やかに全閉位置まで戻される緩減速操作がなされたとき、エンジン回転数を低く抑えて燃料消費率の増大を防止するようにした無段変速機の制御装置を提供する。
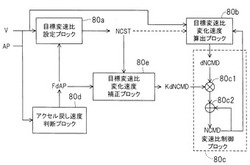
【解決手段】車速Vとアクセル開度APに基づいて無段変速機の目標変速比NCSTを設定するブロック80aと、その目標変化速度dNCMDを同様のパラメータなどで算出するブロック80bと、それら目標変速比NCSTと目標変化速度dNCMDに基づいて目標変速比の最終値NCMDを決定し、その最終値となるように無段変速機の動作を制御するブロック80c、アクセルペダル52が踏み込まれた後に全閉位置まで戻されたときに緩減速操作がなされたか否か判断するブロック80dと、緩減速操作がなされたとき、目標変速比NCSTの変化が速くなるように緩減速処理を実行するブロック80eを備える。
(もっと読む)
運転支援装置

【課題】運転支援装置に関し、周囲の走行環境の変化に応じた協調的な安定走行を実現する。
【解決手段】変速機19を搭載した車両の運転支援装置において、変速比に応じた駆動輪の最大トルクと、走行状態に応じて駆動輪に要求される要求トルクとを演算する演算手段3を設ける。
また、車両の周囲の他車両の走行状況を検出する検出手段2を設ける。
さらに、演算手段3で演算された最大トルク及び要求トルクと、検出手段2で検出された走行状況とに基づき、変速比の変更の要否を判定する判定手段4を設ける。
(もっと読む)
車両制御装置
【課題】車両減速時に燃料消費を抑制する。
【解決手段】走行駆動用エンジン及びニュートラルに切り換え可能な変速機を備えた車両の制御装置であって、車両の目標停止位置までの距離として先行車両との車間距離を検出する車間距離検出装置3と、車速を検出する車速センサ6と、減速開始時において車間距離検出装置3により検出された目標停止位置までの距離と車速センサ6により検出された車速とに基づいて、変速機7をニュートラルとした状態で走行するニュートラル走行と、変速機7を接続した状態で走行する通常走行とのうち、目標停止位置までの燃料消費量の少ない走行方法を選択し、当該選択された走行方法により目標停止位置まで走行するように、走行駆動用エンジン及び変速機7を制御するコントロールユニット2とを備える。
(もっと読む)
オートクルーズ制御装置
【課題】オートクルーズ走行中の車間距離制御において減速を行うとき、適切なタイミングでシフトダウンを行うことで、前走車が加速に移行したときにも円滑に追従することのできるオートクルーズ制御装置を提供すること。
【解決手段】オートクルーズ制御実行中(S1)に車間距離制御(S2)が行われて、減速を行うときは(S4)、目標車速に応じて設定されるオートクルーズ制御用の変速に係る減速時のエンジン回転数閾値よりも高い値である車間距離制御用の減速時のエンジン回転数閾値を用い、エンジン回転数が当該閾値以下である場合(S8)にシフトダウンを実施する(S9)。
(もっと読む)
制動制御システム
【課題】制動制御を行うときの車両の安定性を向上させることができる制動制御システムを提供すること。
【解決手段】車両の全車輪にそれぞれ配置された制動装置が車両に作用させる制動力である第一制動力、あるいは車両の動力源を車両の駆動輪に対する負荷とすることで車両に作用させる制動力である第二制動力の少なくともいずれか一方により車両を制動する制動制御システムであって、車両に要求される減速度である要求減速度を実現するときに車両に作用させる制動力における第一制動力と第二制動力との割合が、車両の挙動安定性に影響する走行環境(S510,S530,S540)に応じて変化する(S520,S550)。
(もっと読む)
車両の走行制御装置
【課題】手動変速機を搭載した車両において、オートクルーズ制御の実行中に、変速操作のためにクラッチの切断操作等が行われたときに、エンジン回転数が吹き上がることを防止する。
【解決手段】エンジン出力がクラッチと手動変速機とを介して駆動輪側へ伝達されるように構成され、かつオートクルーズ制御手段が備えられた車両において、前記オートクルーズ制御手段によるオートクルーズ制御中に、クラッチの切断操作等の動力遮断操作が行われたときに、該操作の直前の状態から手動変速機の変速段を一段シフトアップさせたときのエンジン回転数を目標回転数に設定し、この目標回転数に一致するようにエンジン回転数を制御するエンジン制御手段を備える。
(もっと読む)
前後加速度制御装置
【課題】推定勾配トルクの算出精度が低下しても、フィードフォワード制御の精度の低下を抑制できるようにする。
【解決手段】推定勾配信頼度を演算すると共に、この推定勾配信頼度に応じてフィードバックトルクを補正する。推定勾配信頼度が低ければフィードバック制御器3fのゲインが高くなるようにすることができ、推定勾配信頼度に応じた補正後フィードバックトルクを演算することができる。したがって、推定勾配トルクの信頼度が低下し、フィードフォワードトルクの精度が低下しても、推定勾配信頼度に応じてフィードバックトルクを補正することにより、フィードフォワードトルクの精度低下を補完することが可能となる。よって、推定勾配トルクの算出精度が低下しても、総合的に、フィードフォワード制御の精度の低下を抑制できる。
(もっと読む)
駆動力制御装置
【課題】車両が定常走行状態にあるときに、運転者の意図または道路状況に合わせて、エンジン回転数の変化を抑制できる駆動力制御装置を提供する。
【解決手段】車両が走行するための動力を発生させるエンジンと、エンジンの出力側に動力伝達可能に接続された変速機とを有し、変速機の変速比を制御してエンジン回転数を制御する駆動力制御装置において、車両が定常走行状態にあるか否かを検出する走行状態検出手段(ステップS3)と、車両の走行抵抗を検出する走行抵抗検出手段(ステップS2)と、車両が定常走行状態にある場合は、車両の走行抵抗に応じてエンジン回転数の制御内容を変更するエンジン回転数制御手段(ステップS4,S5)とを備えている。
(もっと読む)
車両走行制御方法
【課題】
車両減速時における車両運動エネルギーの効果的・効率的活用。
【解決手段】
車両現在位置から車両停止地点等の目標地点までの走行距離、現時点の車両走行速度、車両の惰性走行時の減速度、あるいは目標地点到達時刻、をあらかじめ知って、現在地点から惰性走行を開始した場合の停止地点への到達可否の判定を行い、到達可であればその地点からの惰性走行を開始する。到達否であれば、車両現在地点から一定距離走行毎に前記操作を繰り返し、到達可となった時点で惰性走行を開始する。
また前方走行車両への追従走行に際し、前方走行車との車間距離、相対速度、安全車間距離を知って、安全車間距離を満足する同一特定車間距離での加速走行開始、惰性走行開始を交互に繰り返し行うことによって、あるいは相対速度があらかじめ定められている前方走行車との相対速度範囲上下限値+Vr1 および−Vr1到達時において各々惰性走行開始および加速走行開始を行うことによって、ブレーキ操作を介さない安全で効率的な追従走行を可能にする。
【選択図】 図6 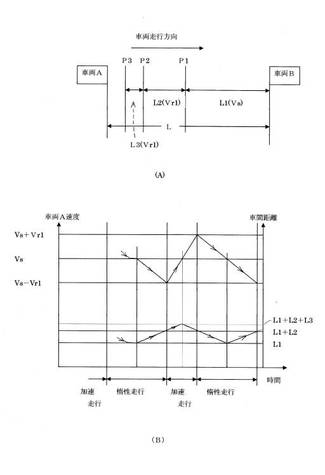 (もっと読む)
(もっと読む)
車両の制御装置及びその制御方法
【課題】渋滞中など車両が急発進できない状況にあるときには、電動ポンプを起動せずにエンジンを停止後エンジンを再始動させる第1の制御態様で制御し、上記以外の状況にあるときには電動ポンプを起動してエンジンを停止後エンジンを再始動させる第2の制御態様で制御するようにした車両の制御装置及び車両の制御方法を提供することである。
【解決手段】電動ポンプを装備した自動変速機を備え、車両の停止中に所定の停止条件成立時にエンジンの自動停止自動始動を行う車両の制御装置において、アイドル停止条件が成立したとき、車両の状況が急発進困難な状況のときは、電動ポンプを起動せずにエンジンを停止後再始動させる第1制御態様で制御し、急発進可能な状況のときは、電動ポンプを起動してエンジンを停止後再始動させる第2制御態様で制御する。
(もっと読む)
車両用走行制御装置
【課題】燃費向上を優先させる運転モードにおいて運転者の負担が増大することを抑制する。
【解決手段】車両用走行制御装置10は、運転者の加速操作を検出して得られる検出結果の信号をAP入力値として出力するアクセルペダル開度センサ31と、AP入力値に基づいてAP出力値を設定し、AP出力値により内燃機関の制御をおこなう制御出力信号設定部44および制御出力信号補正部48および車両制御部49とを備え、自車両の運転状態として低燃費モードを設定する運転モード設定部45と、自車両の加速度を取得する加速度センサ32と、制限加速度を設定する制限加速度設定部46とを備え、低燃費モードが設定され、かつ、加速度が制限加速度よりも大きい場合に、加速度が制限加速度以下となるようにしてAP出力値を補正する。
(もっと読む)
車両の制御装置
【課題】障害物との衝突の可能性があるときに、運転者の衝突回避意思の有無に応じて自動変速機のシフトポジションを柔軟に設定可能な、車両の制御装置を提供する。
【解決手段】SBW−ECU50は、前方衝突不可避検出部81により、前方の物体と車両との衝突が不可避であることが検出された場合、あるいは後方衝突不可避検出部82により、後方の物体と車両との衝突が不可避であることが検出された場合において、シフト切替え機構48を制御することにより、シフトポジションをニュートラルポジションとするニュートラル制御を実行する。ただし、シフト制御装置10は、運転者によるブレーキ操作が実行されている場合には、ニュートラル制御を禁止する。
(もっと読む)
シフトダウン制御装置
【課題】補助ブレーキ作動中のシフトダウン時における減速度の抜けを解消するシフトダウン制御装置を提案する。
【解決手段】オートクルーズコントロール中に補助ブレーキを作動させた後(S3)、シフトダウン条件が成立したときに(S7−S8)、機械式自動変速機がシフトダウン動作を開始して終了するまでの変速時間中に、主ブレーキを作動させ(A)、減速度の抜けを補填する。すなわち、クラッチが切れて補助ブレーキが利かなくなる間を、主ブレーキの制動力にて補填する。
(もっと読む)
シフトダウン制御装置
【課題】補助ブレーキに伴うシフトダウンを交通状況に応じて制御可能なシフトダウン制御装置を提案する。
【解決手段】補助ブレーキ3の作動に伴うシフトダウンを実行可能な自動変速機5を備えた車両のシフトダウン制御装置として、補助ブレーキ3が作動するときに、レーダ8により検知される車間距離をしきい値と比較する車間距離判断手段、そして、車間距離がしきい値以下であった場合に自動変速機5のシフトダウンを許可し、車間距離がしきい値を越えている場合は自動変速機5のシフトダウンを抑止する変速実行判断手段、として動作するシフトダウン制御装置6を提案する。
(もっと読む)
自動車の変速指示装置
【課題】運転者への変速指示を行う変速指示装置に対し、渋滞路走行中における変速指示が運転者に煩わしさを与えないようにする。
【解決手段】現ギヤポジションが目標ギヤポジションと異なっている場合に運転者に対して変速指示を行うようにした変速指示装置に対し、車速、アクセル開度等から渋滞路走行中であるか否かを判定すると共に、運転者が変速指示に従って変速操作を行っている頻度を判定する。渋滞路走行中であって且つ運転者が変速指示に従って変速操作を行っている頻度が低い場合には、現ギヤポジションが目標ギヤポジションと異なっている場合であっても変速指示を解除する。これにより、渋滞路走行中に変速指示が頻繁に行われることで運転者に煩わしさを与えてしまうことを解消する。
(もっと読む)
変速機制御装置、変速機制御方法及びプログラム
【課題】ニュートラル制御の解除を適切に行うことが可能な変速機制御装置、変速機制御方法及びプログラムを提供する。
【解決手段】CPU41は、踏切の手前に停車し、ニュートラル制御を実施している際に、踏切に進入可能な状態になっても、自車両2の前方に停車している他車両が動かないときは、ニュートラル制御を継続する(S12:YES〜S211:NO〜S213:YES〜S215:NO〜S212)。そして、CPU41は、自車両2の前方に停車している他車両が前方に動いた場合には、変速機72の変速段を前進走行レンジに入れて、ニュートラル制御の解除を行う(S12:YES〜S214:NO〜S213:YES〜S215:YES〜S214)。
(もっと読む)
車両制御装置、車両制御方法及びプログラム
【課題】駐車中の自車両に他車両が衝突した際に、車体への損傷を軽減することが可能となる車両制御装置を提供する。
【解決手段】駐車中の自車両2に、前後方向から他車両が所定距離以内(例えば、約50cm以内である。)に接近した場合には、CPU41は、駐車している路面の勾配に基づいて、AT72を「パーキングレンジ(P)」から移動可能な「ニュートラルレンジ(N)」、「ドライブレンジ(D)」又は「リバースレンジ(R)」に切り替える。また、同時に、CPU41は、駐車している路面の勾配に基づいて、パーキングブレーキ73の制動力を解除状態(OFF状態)又は自車両2が停止状態を維持できる程度の制動力まで緩めた状態に設定する(S111〜S116)。
(もっと読む)
車両用制御装置及び制御システム
【課題】車両の駆動力を生成するパワートレイン(エンジン10、自動変速装置14)と、車両の制動力を生成するブレーキアクチュエータ20とを操作することで実際の加速度を目標加速度にフィードバック制御するに際し、それぞれの操作量を算出する処理やその適合を簡易且つ適切に行うこと、更には操作量の算出を適切に行うことが困難なこと。
【解決手段】車両の実際の加速度を目標加速度に制御する際の要求トルクをパワートレインのみによっては生成できなくなると予測される場合、予めブレーキアクチュエータ20のポンプPoを起動する。そして、ブレーキアクチュエータ20による制動力の使用開始とともに、フィードバック制御の制御ゲインを変更する。
(もっと読む)
車両用駆動力制御装置
【課題】コーナーを走行する際にコーナーの情報に基づいて変速比を制御する車両用駆動力制御装置において、運転者の感覚に合うタイミングでコーナーの情報に基づく変速比の制御から復帰することが可能な車両用駆動力制御装置を提供する。
【解決手段】コーナーを走行する際に前記コーナーの情報に基づいて変速比を制御する車両用駆動力制御装置であって、前記車両に働く横加速度を検出する手段(S002)と、アクセル開度を検出する手段(S002)とを備え、前記横加速度の変化量と前記アクセル開度の変化量とに基づいて前記変速比の制御から復帰するタイミングが変更される(S004)。
(もっと読む)
ハイブリッド車両の駆動力制御装置
【課題】複数の変速モードに切り替え可能な変速機を有するハイブリッド車両において、変速ショックを抑制しつつ回生量の増大を実現することが可能なハイブリッド車両の駆動力制御装置を提供する。
【解決手段】複数の変速モードに切り替え可能な変速機を有するハイブリッド車両の駆動力制御装置であって、減速の必要性が継続するか否かを判定する手段(S004)と、前記減速の必要性が継続すると判定された場合(S004−Y)には、前記複数の変速モードのうち低速用の変速モードに切り替えられ易くする手段(S005、S009−Y、S011)とを備えている。
(もっと読む)
1 - 20 / 64
[ Back to top ]