
Fターム[4C601GA22]の内容
Fターム[4C601GA22]に分類される特許
1 - 20 / 33
X線診断装置
【課題】超音波断層映像の撮像時に操作者が被ばくすることがなく、一人の操作者がX線
と超音波プローブを操作できるX線診断装置を提供する。
【解決手段】プローブを把持し、遠隔操作によって駆動するプローブアームを可動アームに備える。プローブはX線画像上を位置操作部によって指定することにより、移動させることができる。さらに、プローブの位置を記憶し、その位置にプローブを再び移動する。また、画像位置情報記憶部にX線画像データとプローブ位置情報とを関連付けて格納する。格納されたプローブ位置情報を読み出し、再度その位置にプローブを移動させる。
(もっと読む)
生体情報取得装置

【課題】照明光を自由に照射させること抑制することで、光音響装置の安全性を改善させること。
【解決手段】光音響装置において、被検体に照射する光を出射する出射部を有する光照射手段と、前記光照射手段からの光の照射を受けて前記被検体が発する光音響波を受信して電気信号を出力する探触子と、前記出射部の位置または向きを検知する検知手段と、前記検知手段の検知結果に基づいて光源の発光許可及び発光停止を制御する制御装置を有する。
(もっと読む)
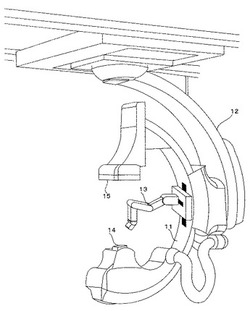
機器又は器具の操作を支援する装置
【課題】医師が着目領域の患部を目標に設定して解析するのを支援する。
【解決手段】機器又は器具の操作を支援する装置は、支持体(15)に設けられて、機器又は器具(S)を取り付けることができる関節型機械的構造(100)と、構造(100)が機器又は器具(S)に提供するものよりも少ない自由度数に従って関節型機械的構造(100)を作動させるモータ駆動部(11、12、13)と、これらのモータ駆動手段の自動制御部(16)とを含んでおり、制御部(16)は、機器又は器具(S)の位置パラメータ及び/又は速度パラメータに対する制約の達成を容易にするためにモータ駆動部(11、12、13)を駆動し、モータ駆動部(11、12、13)は、操作者による操作とは独立に当該駆動部自体では制約を完全には達成し得ない。
(もっと読む)
腹腔鏡超音波ロボット外科手術システム
【課題】LUSロボット外科手術システムを提供すること。
【解決手段】LUSロボット外科手術システムは、外科医によってLUSプローブを命令時に所望の方法で移動させるよう訓練することが可能であり、その結果外科医は、最小侵襲外科手術手順の間に手動でそうする必要がない。格納された命令に従ってLUSプローブによって捕捉された2D超音波画像の列は、解剖学的構造の3D超音波コンピュータモデルへと処理可能であり、該モデルは、カメラビューに対する3Dまたは2Dオーバーレイとしてまたは外科医によって選択されたPIP内に表示され得、または外科医が異常に関する解剖学的構造を検査することを支援するようプログラムされ得る、仮想的な固定される物が定義可能であり、その結果、外科医が表示された超音波画像上の標的に正確にツールを案内することを支援する。
(もっと読む)
超音波診断システム、超音波診断装置用ロボット、及びプログラム
【課題】超音波プローブの位置や姿勢が所望の超音波画像が得られる最適状態から変化したときに、当該最適状態に超音波プローブを迅速に戻すことを可能にする。
【解決手段】本発明の超音波診断システム10は、超音波プローブ14と、超音波プローブ14からの信号により超音波画像を生成する超音波画像生成手段15と、超音波プローブ14を動作させるロボットアーム17と、所定範囲内で予め超音波プローブ14を移動させた際に、当該移動中の各位置での超音波画像を記憶画像20Aとして記憶する記憶手段20と、現在得られている現画像Nと各記憶画像20Aとの対比により、目標画像Tが得られる超音波プローブ14の最適位置及び最適姿勢に対する変化量を求めるプローブ状態変化量検出手段21と、プローブ状態変化量検出手段21で求めた変化量がゼロになるようにロボットアーム17の動作制御を行う動作制御手段22とを備えている。
(もっと読む)
腹腔鏡超音波ロボット外科手術システム
【課題】LUSロボット外科手術システムを提供すること。
【解決手段】LUSロボット外科手術システムは、外科医によってLUSプローブを命令時に所望の方法で移動させるよう訓練することが可能であり、その結果外科医は、最小侵襲外科手術手順の間に手動でそうする必要がない。格納された命令に従ってLUSプローブによって捕捉された2D超音波画像の列は、解剖学的構造の3D超音波コンピュータモデルへと処理可能であり、該モデルは、カメラビューに対する3Dまたは2Dオーバーレイとしてまたは外科医によって選択されたPIP内に表示され得、または外科医が異常に関する解剖学的構造を検査することを支援するようプログラムされ得る、仮想的な固定される物が定義可能であり、その結果、外科医が表示された超音波画像上の標的に正確にツールを案内することを支援する。
(もっと読む)
音響波測定装置および音響波測定方法
【課題】 被検体を目視確認することができない場合、測定位置に照射手段を高精度で移動させることが難しい。
【解決手段】 本発明の音響波測定装置は、被検体を保持する保持手段と、前記被検体に光を照射する照射手段と、前記光により前記被検体内で発生する音響波を前記保持手段を介して受信する音響波検出手段と、を有し、さらに、前記被検体を撮像する撮像装置と、前記撮像装置により取得された画像上における測定位置を測定者が指定するための位置指定手段と、前記画像上の測定位置の座標を前記保持手段上の対応する位置の座標に変換する座標変換手段と、前記保持手段上の前記対応する位置に、前記照射手段と前記音響波検出手段のうち少なくとも一方を移動させる位置制御手段と、を有する。
(もっと読む)
放射線撮影法取得手段と超音波プローブのための誘導手段とを備えた医用撮像装置
【課題】X線及び超音波を介した取得のための同じ取得幾何学的構成を用いて、X線及び超音波によって乳房の所与の区画の様々な画像を撮影するための装置を提供する。
【解決手段】医用撮像装置は、X線による取得手段(14、15、17、26、74)と、利用者によって手動で移動されることが可能な超音波プローブ(10)と、処理手段(32)を備え、処理手段が、X線取得手段によって取得されるデータから対象の少なくとも一つの画像を形成し、超音波プローブの位置と上述の画像の選択された区画に対応する対象における位置との間の経路(30)を決定する。超音波プローブの誘導手段(20)は、超音波プローブの位置と上述の画像の選択された区画に対応する対象における位置との間の上述の経路に沿ってプローブを移動させることを容易にする。
(もっと読む)
超音波診断装置
【課題】装置を大型化することなく超音波プローブの操作範囲を広くし、操作性の向上を図ることができる超音波診断装置を提供する。
【解決手段】眼科用超音波診断装置100は、超音波プローブ102と、本体104と、保持装置106とで構成されている。本体104の筐体110には、筐体110の上部112と底部114との間に開口した空間116が形成されており、この空間116内の水平面内で回転可能に支持する回転支持軸120に装着されている取付部118が角度α回転する。
(もっと読む)
治療および画像処理超音波変換器用のマイクロマニピュレータ制御アーム
多くの特徴のいくつかを含むことができる医療用画像処理治療装置が提供される。本装置の1つの特徴は、本装置が目標組織体積の画像処理を行い、目標組織体積に超音波エネルギを印加することができる点である。いくつかの実施形態では、本医療用画像処理治療装置は、超音波治療システムにより生成される空洞現象気泡混濁を画像処理システムにより生成される前立腺の画像内に維持することにより、前立腺内に超音波エネルギを制御自在に印加するように構成される。本医療用画像処理治療装置は、例えば、組織破砕術、砕石術、およびHIFUなどの治療用途に使用することができる。本医療用画像処理治療装置の使用に関する方法も対象とされる。 (もっと読む)
超音波診断装置
【課題】組織の運動方向に合わせてバイプレーンの最適な回転位置を設定する。
【解決手段】バイプレーンである走査面セットは第1走査面及び第2走査面によって構成される。走査面セット(又は一方の走査面)が試行的に回転走査される。各回転角度において注目組織の計測が行われ、その計測結果に基づいて走査面セットの適正回転角度が判定される。その適正回転角度に走査面セットが位置決められる。
(もっと読む)
超音波スキャンのための支持アーム
【課題】超音波スキャンのために超音波トランスジューサを容易に位置決めすることができるようにした超音波スキャンシステムを提供する。
【解決手段】超音波トランスジューサ12と、超音波トランスジューサ12と連結した少なくとも第1の支持アーム18と、第1の支持アーム18に印加される重力による力よりも小さなまたは大きな力を相殺するように形成された抵抗装置16,22とを有しており、第1の支持アーム18は可動であり、超音波トランスジューサ12は重力によってスキャンの対象物28に押し当てられるが、抵抗装置16,22の抵抗により、抵抗装置16,22なしで第1の支持アーム18に印加される重力による力から生じる圧力よりも小さな圧力で押し当てられることを特徴とする超音波スキャンのためのシステム。
(もっと読む)
超音波診断装置および画像撮影プログラム
【課題】被検体の乳房に対してどのような位置関係にあるのかを容易に把握すること。
【解決手段】回転軸11に対して垂直な第一の垂直軸を中心に回転するように取り付けられたアーム12の両端に設置され、かつ、回転軸11に対して垂直な第二の垂直軸を中心に回転する第一超音波プローブ13および第二超音波プローブ14が、被検体の乳房上を走査して断層画像を撮影する。角度取得部27は、撮影時における超音波プローブそれぞれの水平方向に対する回転角度をアーム回転制御部26から取得し、超音波プローブそれぞれによる撮影方向の回転軸11に対する傾斜角度をアーム角度センサ15、第一角度センサ16および第二角度センサ17から取得する。そして、表示制御部28は、画像生成部25が生成した断層画像とともに、角度取得部27が取得した回転角度および傾斜角度を表示部32にて表示するように制御する。
(もっと読む)
超音波診断装置
【課題】非侵襲で簡便に膝関節の軟骨の三次元形状を抽出できる装置を提供する。
【解決手段】椅子に腰掛けるなどして大きく曲げられた膝に対し、振動子部40により超音波ビームを走査することで、大腿骨100の遠位端を含む、膝内部のボリュームデータを取得する。超音波診断装置は、そのボリュームデータに対しエッジ抽出を行うことで、組織境界を抽出する。抽出された組織境界の中から、ユーザの指定等に基づき、軟骨輪郭に該当する部分を抽出する。
(もっと読む)
超音波プローブ及び超音波診断装置
【課題】操作が容易で広い視野範囲の画像データを得ることができる超音波プローブ及び超音波診断装置を提供する。
【解決手段】振動子部11を伸縮自在なアーム40を用いてレール30に沿って揺動することにより、振動子部11は、第1の曲率を有する第1の軌道と、この第1の軌道の第1の曲率を有する延長曲線の内側に位置し、第1の軌道の両端に接続された第1の曲率よりも大きい第2の曲率を有する第2及び第3の軌道とにより構成される軌道を描く。そして、その軌道の複数の揺動角における超音波の走査に基づいて、三次元画像データを生成して表示部5に表示する。
(もっと読む)
超音波乳房診断支援システム
【課題】 乳房に対して超音波を送受波することで、乳房とその近傍の鮮明な断層画像を自動的に取得し、乳房の画像を三次元的に表示して以て病変の有無などの診断を支援するシステムを提供する。
【解決手段】 本発明の超音波乳房診断支援システム1は、水槽2と、水槽2に垂下浸漬された乳房の形状を近似するためのプレスキャン手段と、乳房の内部の状態を測定するための本スキャン手段と、本スキャンで得られた断層画像から病変の疑われる部分を指摘する鑑別処理手段と、鑑別処理手段が指摘した箇所を再撮像するための再スキャン手段とを備えている。本スキャン手段及び再スキャン手段は、超音波プローブ4が乳房に略法線方向から超音波を入射するように移動するアーム機構3を備えている。
(もっと読む)
取得された画像データに反応するフィードバックを用いる微調整及び位置決め制御を持つロボット超音波システム
撮像システムは、トランスデューサを含む超音波診断前端モジュールと、ロボットアーマチュア2と、前端モジュール及びロボットアーマチュアの各々に電気的に結合されるコントローラ4とを含む。該コントローラは、解剖学的構造に対してトランスデューサを動かすためにロボットアーマチュアを利用し、該コントローラは、前端モジュールから受信される取得された画像又はデータセットにおけるキー属性を検出し、キー属性検出に基づいてトランスデューサの位置への所望の調整値を計算し、所望の位置調整を適用するためにロボットアーマチュアを利用する、フィードバック制御モードで動作可能であることを含む。  (もっと読む)
(もっと読む)
X線診断装置
【課題】超音波断層映像の撮像時に操作者が被ばくすることがなく、一人の操作者がX線と超音波プローブを操作できるX線診断装置を提供する。
【解決手段】プローブ25を把持し、遠隔操作によって駆動するプローブアーム13を可動アーム11に備える。プローブ25はX線画像上を位置操作部47によって指定することにより、移動させることができる。さらに、プローブ25の位置を記憶し、その位置にプローブを再び移動する。また、画像位置情報記憶部55にX線画像データとプローブ位置情報とを関連付けて格納する。格納されたプローブ位置情報を読み出し、再度その位置にプローブ25を移動させる。
(もっと読む)
ハプティックフィードバックを用いた医用スキャニング方法及び装置
医用イメージングに用いられる装置は、複数自由度の運動能力を有するロボットアーム220と、ロボットアームの端部に近接して結合されるスキャニングトランスデューサ230と、1又は複数の機械的リンケージを有し、ロボットアームと通信し、1又は複数の方向又は角度でロボットアームを動かすためにコマンド信号を出し、ロボットアームからフィードバック信号を受け取るように適応されるハプティックインタフェース250と、を有することができる。  (もっと読む)
(もっと読む)
乳房の超音波診断装置とその画像表示方法
【課題】乳房のBモード像だけではなく、乳房表面から深さ方向に等距離にある断面像(Cモード像)も含めて、乳房の任意の断面の超音波画像を提供できるデータを取得することができる乳房超音波診断装置および超音波画像表示方法を提供する。
【解決手段】本発明による乳房超音波診断装置は、アーム2を介してリニア電子走査形超音波探触子3を支持し、体位調整により水平に保たれた乳房表面に対して前記探触子3が平行になるように直接接触するかまたは液体の音響媒体を介して設置する。超音波ビームを乳房内部に入射しつつ探触子3を乳頭13を中心に回転する。前記探触子3の傾斜角度θを遂次検出しながら回転して得られる乳房内の全ての超音波反射情報を記憶する。前記記憶データに基づいてデータを再構成することにより乳房の任意の断面の超音波画像を表示可能に構成されている。
(もっと読む)
1 - 20 / 33
[ Back to top ]