
Fターム[4E065BA03]の内容
Fターム[4E065BA03]の下位に属するFターム
係止具 (1)
加圧媒体の供給
Fターム[4E065BA03]に分類される特許
1 - 20 / 24
スポット溶接方法及びスポット溶接装置
【課題】2枚の厚板に薄板を重ねた被溶接部材をスポット溶接にあたり、安定した溶接品質が得られるスポット溶接方法及びスポット溶接装置を提供する。
【解決手段】薄板101、第1厚板102、第2厚板103が順に重ね合わせた被溶接部材100をスポット溶接するにあたり、第2厚板102に当接する固定側電極104と薄板101に当接する可動側電極17及び可動側電極17に隣接して薄板101に当接する制御加圧手段20とによって被溶接部材100を挟持加圧する。第2厚板103に固定側電極14による加圧力が付与され、薄板101側に可動側電極17による加圧力と制御加圧付与手段20による制御加圧力が付与され、可動側電極17による加圧力より固定側電極14による加圧力が小さく制御される。薄板101と第1厚板102間の電流密度が高くなり、薄板101から第2厚板103に亘って良好なナゲットが形成され、溶接品質が向上する。
(もっと読む)
スポット溶接機

【課題】バラツキなく安定して適切な加圧力を供給でき、優れた溶接品質と安全で効率の良い作業ができる足踏みペダル式スポット溶接機を提供する。
【解決手段】足踏みペダル(10)によりリンク機構(5)のリンクなどで上電極(3)を下降させ、下電極(4)とで被溶接物(W)を挟みこみ、コイルバネ(17)のばね力で押圧し、このとき足踏みのリンク機構(5)による被溶接物(W)への押圧はエアシリンダ(6)のピストンロッド(21)を降下させるのみのごく弱いコイルバネ(17)のばね力にとどめる構造とする。更に足踏みペダル(10)を一定量踏み込むと、メカスイッチ(15)が作動し、エアシリンダ(6)による加圧力が付与されて、同時に溶接電流が流れ、スポット溶接を開始する。
(もっと読む)
単一ピストンまたは2重ピストンを使用する低衝撃スポット溶接シリンダ
【課題】単一ピストンを有し、ロッドの衝撃力を減少する溶接シリンダ。
【解決手段】引込ピストン組立体内に配置されるピストンを備えた可動の引込ピストン組立体を有し、ロッドはホーム位置から中間位置へ急速に運動するが、ロッドは、衝撃力を減少するために中間位置から加工位置へ、よりゆっくりと運動する。緩衝室は緩衝弁内の予オリフィスと孔を通して排出されるが、分離体は開放位置となる。緩衝弁が、緩衝弁上での引込−前進圧力に応答して開放すると直ちに、緩衝室は急速に排出し、サイクルタイムの増加を最小にするために、溶接力は急速に増加する。
(もっと読む)
抵抗スポット溶接ガン
【課題】ガンアームを簡単な構造で部品交換することと,吊り金具の回転角度を任意に固定することで多種多様なワークのスポット溶接に対応すること。
【解決手段】一つの加圧用アクチュエータから既存のガンアームをワンタッチで部品交換を可能とするクランプ機構と,大ストロークの場合でもガンアームのふところ内に大きな可動側シャントを必要としないコンタクト給電機構と,スポット溶接ガンを回転させることが可能な吊り金具の回転角度を任意の位置で停止できるブレーキ装置とを組み合わせた抵抗スポット溶接ガンを実現した。
(もっと読む)
トランスを備えたX型サ―ボガン
【課題】 溶接装置の全体の長さを短くさせてガンの小型,軽量,至便化を図ると共に、固定ア―ムの補強を充分にしたトランスを備えたX型サ―ボガンを提供する。
【解決手段】 ロボットに接続される取付面3を有するガンブラケット2に揺動ア―ム4の後端部を軸支する主軸5を設け、該ガンブラケットに固定ア―ムを固定または一体に成形し、前記揺動ア―ムに該揺動ア―ムを加圧駆動する加圧駆動装置6の加圧ロッド11を軸支し、該加圧駆動装置の本体13側を前記ガンブラケットに軸支し、前記固定ア―ムに溶接用トランス17を挟持させたトランスを備えたX型サ―ボガン。
(もっと読む)
ダイレクト溶接装置およびその溶接方法
【課題】 抵抗溶接において、シリーズ溶接での溶接強度のばらつきを低減し、ダイレクト溶接装置での低い生産性を向上させるダイレクト溶接装置を提供する。
【解決手段】 溶接電源1と、第一、第二加圧機構4、5と、第一、第二上部電極6、7および第一、第二下部電極12、13を有し、電気的に直列に接続されていることを特徴とするダイレクト溶接装置である。
(もっと読む)
マルチスポット溶接装置
【課題】溶接箇所ごとに溶接点数を変えることができるマルチスポット溶接装置を提供する。
【解決手段】2個1組とした溶接電極8、9及び10、11を装着した加圧ガンを2組設けて構成した加圧ガンユニット1によりワークWをシリーズスポット溶接又はインダイレクト溶接するマルチスポット溶接装置であって、2組の加圧ガンにそれぞれ装着された溶接電極8、9及び10、11に個別に給電する2個の変圧器33、34を設け、各組の加圧ガン2個中各1個の溶接電極5、7が装着された加圧ガンの間に可動接点21と固定接点22からなる開閉器を設けた。
(もっと読む)
スポット抵抗溶接機
【課題】 電力損失を防ぐと共に、重い圧着ケーブル線による作業者の疲労を少なくする。
【解決手段】 下部電極1と、上部電極2と、この上部電極2を下部に装着した支持ポスト6と、この支持ポスト6を先端7Aで支持すると共に基端7Bを設置支柱8の上部8Aに連結した支持ア−ム7とを具える。支持ポスト6、支持ア−ム7、設置支柱8の上部8Aを導電性部材により形成し、また支持ア−ムを2つの分割ア−ム13,14により形成し、これらを導電性部材により形成する。これらの対向端部を電気接続部により接続する。また、設置支柱8と支持アーム7の間と2つの分割ア−ム13,14の間にそれぞれ無励磁作動電磁ブレーキ38,46を設ける。溶接電源5からの給電Eは、設置支柱8の上部8A、分割ア−ム13,14、支持ポスト6を介して上部電極2へ至る。これにより従来の給電用ケーブルに伴う電力損失、作業者の疲労などの弊害を少なくできる。
(もっと読む)
自動スポット溶接装置
【課題】溶接ガンの移動と被溶接物の移動とを同時に行わせて、溶接ガンの待機時間を短くするとともに、移動機構を単純なものとして安価に構成できる自動スポット溶接装置を提供すること。
【解決手段】自動スポット溶接装置1では、溶接ガン支持手段2は、スポット溶接ガン3の横移動に追従して移動するロック54と、ロック54が当接してその横移動を停止させるブロック133と、スポット溶接ガン3が停止したことを検知する検知手段134と、を備え、スポット溶接ガン3は、ピストンロッド302の上端にロック54と当接可能に設けられ、ピストンロッド302下降時にはロック54の上面に当接した際、上方に回動してピストンロッド302の下降を許容し、加圧終了後のピストンロッド302上昇時にはロック54を跳ね上げて、ロック54とブロック133との当接を解除する解除手段30を備えた。
(もっと読む)
スポット溶接装置およびスポット溶接方法
【課題】可動チップがワークに当接するまでの可動チップの移動速度を高速としつつ、スポット溶接時におけるワークへの加圧力を高精度に管理できるようにしたスポット溶接装置を提供する。
【解決手段】空気圧シリンダ5とサーボモータ13を駆動源としたボールねじ機構14および圧縮コイルスプリング18を直列に配設し、可動チップ2と固定チップ4が離間した初期状態から空気圧シリンダ5により可動チップ2を固定チップ4に向けて比較的高速で移動させ、その可動チップ2をワークWに突き当てた上で、サーボモータ13によりワークWに与える加圧力を微調整する。
(もっと読む)
溶接装置
【課題】サーボモータを大型化することなく、溶接ワークに対する加圧力を大きくできる溶接装置を提供すること。
【解決手段】溶接装置10は、一対の溶接電極を有する溶接ガンと、一対の溶接電極を接近、離隔させる第1シリンダ機構12と、第1シリンダ機構12を駆動する第2シリンダ機構13と、第2シリンダ機構13を駆動するサーボモータ14と、を備える。第1シリンダ機構12は、油が収容された第1シリンダ121と、第1シリンダ121内を往復動可能に設けられて一対の溶接電極の一方に連結された第1ピストン122と、を備える。第2シリンダ機構13は、油が収容されて第1シリンダ121に連結された第2シリンダ131と、第2シリンダ131内を往復動可能に設けられてサーボモータ14に連結された第2ピストン132と、を備える。第2シリンダ131の断面積は、第1シリンダ121の断面積よりも小さい。
(もっと読む)
スポット溶接補助装置
【課題】1台のスポット溶接機を所謂親機として、そのスポット溶接チップから当接されて給電され、大小多様な構造のワークおよび多様な溶接姿勢に対応できるようなスポット溶接補助装置を提供する。
【解決手段】左右の上部電極アーム13X,13Yと、1台の下部電極ベッド3と、それらを支軸4dによって開閉自在に連結したスポット溶接用の補助装置であって、上部電極アームは、それぞれ、外部溶接電源と接続して電力供給を受ける左右上部電極受電端子13a,13bを有するとともに、上部電極アームの先端部に設けられ左右いずれかの上部電極受電端子と導通状態にある左右のスポット溶接部12a,12bを備え、下部電極ベッドは、外部溶接電源と接続して電力供給を受ける左右の下部電極受電端子4a,4bを有するとともに、下部電極ベッドの先端部に設けられ左右下部電極受電端子とそれぞれ導通状態にある左右の溶接チップ2a,2bを備える。
(もっと読む)
溶接ガン
【課題】 ガンアームの開閉動作を円滑に行うと共に、ガンの開度を大きくすることができる溶接ガンを提供する。
【解決手段】 エアシリンダ3を駆動して先端部1d,2bに電極チップ9,11を装着する一対のガンアーム1,2を開閉する溶接ガンであって、一方のガンアーム2にフレーム4を介して直線部5a,6aと湾曲部5b,6bからなるレール5,6を敷設し、他方のガンアーム1にレール5,6に摺動自在に嵌合するスライダ7a,7bを固設し、シリンダ本体3aを下側ガンアーム2の後端部2aに先端部2bから離れるように突出して配設した一対のブラケット8,8に回動自在に軸支し、ピストンロッド3bの先端を上側ガンアーム1の後端部1cに回動自在に軸支するようにした。
(もっと読む)
抵抗溶接ヘッド装置
【課題】電極の追従性を向上させつつ加圧力を安定させることを目的とする。
【解決手段】一対の電極22A,22Bと、一対の電極22A,22Bを相対的に接近離隔移動自在に支持する電極保持機構30と、一対の電極22A,22Bを相対的に接近させてそれらの間に溶接対象ワークWを挟込んで加圧するように一対の電極22A,22Bを移動させるエアシリンダ40とを備える。エアシリンダ40として、静圧タイプのエアシリンダ40を用いる。
(もっと読む)
スポット溶接用のトランス内蔵型ロボット
【課題】スポット溶接用ロボットの重心を安定化させると共に、その先端を軽くし、そのロボットのタクト・タイムが短く、動作が迅速で、反応の早いスポット溶接用ロボットを提供すること。
【解決手段】溶接ガン7、溶接トランス5、加圧機構6を有するスポット溶接用ロボットにおいて、スポット溶接用ロボットの先端部の内部に溶接用トランスを内蔵し、当該ロボットの先端部の先端に設けられている当該ロボットのマウント8に溶接ガンのマウントを装着したこと。さらに、前記溶接用トランス及び溶接ガンが小型かつ軽量であること。
(もっと読む)
抵抗溶接機の電極加圧機構
【課題】低加圧力から高加圧力まで適正な押し下げ代(即ち、縮み代、伸び代)を有して、加圧力を被溶接物に与えることができる抵抗溶接機の電極加圧機構を提供する。
【解決手段】加圧電極を弾性部材を介して押圧手段13によって固定電極に向けて加圧し、固定電極と加圧電極との間に挟まれた被溶接物に加圧力を与える抵抗溶接機の電極加圧機構10において、弾性部材はそれぞれ縮み代に対する加圧力が異なる複数種類のばね部材15、16を直列に配置したものからなり、弱加圧及び強加圧での被溶接物への押圧力に対する押し下げ代を確保した。
(もっと読む)
抵抗溶接機の加圧方法及び加圧機構
【課題】加圧力の制御範囲が広く、元圧以上の加圧力を被溶接物に加えることが可能で、溶接途中での加圧力の制御も可能な抵抗溶接機の加圧方法及び機構を提供する。
【解決手段】対向する固定電極35と加圧電極18を有し、加圧電極18はエア源に接続されるエアシリンダー13によって固定電極35に被溶接物55を介して押圧される抵抗溶接機の加圧方法及び機構であって、エアシリンダー13は、加圧電極18に連結される第1のピストン11の他に第2のピストン12を備え、第2のピストン12を電動モータ15を動力とする直線移動手段20によって、第1のピストン11によって加圧電極18を押圧する時に、第1のピストン11に近づけて、第1及び第2のピストン11、12間のエアの圧力をエア源の圧力より高め、固定電極35に対する加圧電極18の押圧力を増す。
(もっと読む)
抵抗溶接機
【課題】 ダイレクトスポット溶接と、シリーズスポット溶接やインダイレクトスポット溶接などの片側溶接に併用できる抵抗溶接機の提供
【解決手段】
抵抗溶接機10は、一対の溶接電極11、12を備え、一対の溶接電極11、12の電極面11a、11b、12a、12bが対向する位置と、横に並ぶ位置とに、一対の溶接電極11、12を相対的に移動させる移動機構13を備えたものである。
(もっと読む)
溶接機用2段ストロ―クシリンダ
【課題】 ストッパ切換えシリンダを用い、該ストッパ切換えシリンダのピストンをリトラクトシリンダからのピストンロッドのストッパとすることで、リトラクトシリンダへの加圧シリンダの反力を十分,確実に受け止め得る信頼性の高い溶接機用2段ストロ―クシリンダを提供する。
【解決手段】 リトラクトシリンダ5と加圧シリンダ6とを別離したシリンダとし、リトラクトシリンダを溶接機に固定すると共にリトラクトシリンダの後方に移動可能に加圧シリンダを配置し、リトラクトシリンダからのピストンロッド11の先端部を加圧シリンダの前面に固着し、リトラクトシリンダの後部にストッパ切換えシリンダ21を配置し、ストッパ切換えシリンダのピストン25をストッパとしてリトラクトシリンダからのピストンロッドに係止させるようにした溶接機用2段ストロ―クシリンダ。
(もっと読む)
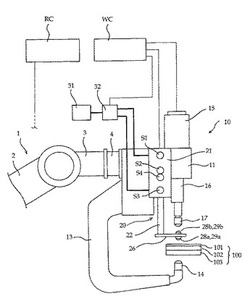
電極加圧制御方法と装置
【課題】抵抗溶接機の安全性向上及び溶接品質向上を図る加圧制御システムを提供する。
【解決手段】加圧式抵抗溶接機のエア源から可動電極の加圧力を調整するためのエア供給回路に配置された加圧シリンダと該シリンダに内蔵された弾性部材と加圧シリンダにより動作させる可動軸とを有し,加圧シリンダのエア供給回路には第1電磁弁(SOL1)及び第2電磁弁(SOL2)が接続され第1電磁弁を作動することにより,可動軸,可動電極又はアーム,二次導体等を含む可動部による荷重及び弾性部材の弾力により可動電極が自重下降を開始してから本加圧で溶接完了するまでの可動電極の移動速度及び/又は移動距離をリニアエンコーダにより検出し,その検出した値が前記可動電極の移動中に異物を挟み込んだときの安全を確保するための基準値と溶接品質を確保するための基準値との設定可能なしきい値を超えたとき,可動電極を停止及び/又は開放動作させる。
(もっと読む)
1 - 20 / 24
[ Back to top ]