
Fターム[5B057AA01]の内容
Fターム[5B057AA01]の下位に属するFターム
物流、搬送品 (951)
Fターム[5B057AA01]に分類される特許
181 - 200 / 447
歪情報の表示装置

【課題】本発明は、ガラス等の透光体や平面鏡と曲面鏡等のミラー反射面の歪情報を、歪の場所と強さと方向の表示を同時に、視覚的にわかりやすく表現する事のできる表示装置を得ることにある。
【解決手段】歪検査装置によって検査された歪情報の表示装置において、検査対象物画像の歪検出部分に、歪方向情報に基づき、色分けして表示する色分け表示手段を有する事により歪の方向を色情報により表現することが出来、更に、上記色分け表示手段が、歪の方向情報と歪の強さ情報に基づいて、色分けして表示する事により、歪の強さと方向を色情報により表現することにより、何れも視覚的にわかりやすく、検査及び不良解析に利用することを可能にした。
(もっと読む)
画像処理装置およびプログラム

【課題】点線状又は様々な方向に延びる物体の欠陥又は画質欠陥を精度良く検出することを可能にする。
【解決手段】制御部は、階調値が輝度成分によって表される画像データにおいて、所定の方向に延びる画素群において、輝度分布を求める(SB3)。制御部は、各々の画素群の輝度分布において、輝度成分が最小値の画素を抽出し(SB4)、これらのうち角度領域に別の抽出画素がある注目画素を抽出する(SB5)。制御部は、回帰直線を求めて残差が大きい抽出画素を除去すると(SB6〜SB8)、これらを欠陥に相当する画素として抽出する(SB9)。
(もっと読む)
欠陥検査方法および欠陥検査装置
【課題】変形欠陥の捕捉が確実に行えるとともに、変形欠陥と異物欠陥など他の欠陥との判別が容易に行える欠陥検査方法および欠陥検査装置の提供。
【解決手段】検査対象物の表面を撮影して前記検査対象物の表面欠陥を検査する欠陥検査方法であって、前記表面から任意の焦点高さ離れた位置に焦点が合った状態で前記表面を撮影し、前記焦点高さにおける画像として記録する一次画像記録工程と、前記画像の検査すべき全ての部位に対して、当該部位の周囲に対する当該部位の濃淡を強調して数値化するフィルタ処理を行い、前記画像における欠陥候補部位を検出する一次画像フィルタ工程とを含む。
(もっと読む)
画像処理システム、表示装置、プログラムおよび情報記憶媒体
【課題】より目的の色に調整しやすくすることが可能な画像処理システム等を提供すること。
【解決手段】プロジェクタ100が、色空間におけるRGB系の複数の基準色およびCMY系の複数の基準色を含む基準色群のうちの少なくとも1つの前記基準色の色相を調整することを示す調整情報に基づき、前記色空間における白色と黒色を結ぶ直線を回転軸として選択基準色を回転移動させることによって前記色空間を示す色空間情報を更新する更新部120と、前記色空間情報に基づき、入力画像信号を補正する補正部140を含んで構成される。
(もっと読む)
データ取得装置
【課題】一つの装置により、種々の計測機器における計測表示部から数値データを取得し得るデータ取得装置を提供する。
【解決手段】計測機器の計測表示部を撮影するとともに当該撮影画像から数値データを取得する携帯式のデータ取得装置であって、計測機器の計測表示部を撮影する撮影手段1と、計測機器側に設けられた識別データ発信手段5からの識別データを入力して当該計測機器の種類を識別する計測機器識別部11と、計測機器の種類に応じた画像処理方法を格納した画像処理方法格納部12と、撮影手段1で撮影された撮影画像および計測機器識別部11にて識別された識別データに基づき画像処理方法格納部12から当該計測機器の種類に応じた画像処理方法を入力するとともに当該画像処理方法を適用して、その撮影画像から数値データを認識する数値データ認識部13とを具備したもの。
(もっと読む)
外観検査装置およびその画像処理方法
【課題】短い検査時間で被検査物の外観の状態を検査することが可能な外観検査装置およびその画像処理方法を提供する。
【解決手段】ボトルBの被検査面にあるラベルの状態を検査するラベル検査装置1において、ボトルBを自転させる検査テーブル512と、この検査テーブルを公転させるインデックステーブル511と、ボトルBの1周分以上を順次撮像してそれぞれを走査画像として出力するラインカメラ52と、ラインカメラ52により走査画像を1周分より多く結合した画像を元画像とし、この元画像から1周分を切り出した切出画像を被検査面画像とし、被検査面画像に含まれる検査対象画像が分断されているか否かを判定し、検査対象画像が分断されていると判定されると、被検査面画像を前記被検査面の基準位置に対応する位置から2分割し、2分割した被検査面画像のそれぞれの位置を入れ替えて結合して検査画像とする画像処理部を有する制御部53とを備えた。
(もっと読む)
ウェーブドベルトの波形計測方法とウェーブドベルトの波形計測装置
【課題】ウェーブドベルトの周期長λと波高長2aの値を精度良く求めることのできるウェーブドベルトの波形計測方法とその装置を提供する。
【解決手段】試料台に波型面を表面側にして保持したウェーブドベルトに照射装置から照明光を照射しながら、CCDカメラにより撮影した画像を複数個のブロックに分割した後、上記ブロック中の画像を直線で近似してから、当該ベルトの長手方向と画面の水平方向とのなす角δを算出してその符号を調べ、波の頂点である、山もしくは谷となる位置を含む基準ブロックを指定し、この基準ブロックのうち、山となる位置を含む2つの基準ブロックの重心同士を結ぶ線分を引き、その長さを測定して周期長λを求めるとともに、上記2つの基準ブロックの中間に位置する谷となる位置を含むブロックの重心と上記線分との距離から波高長2aを求めるようにした。
(もっと読む)
欠点検査装置および欠点検査方法
【課題】欠点分類の精度を向上させる最適化サイクルを有する欠点検査装置および検査方法を提供する。
【解決手段】被検査物に光を投射する投光手段と、該被検査物を介した透過光または反射光を受光する受光手段と、該受光手段が受光した透過光または反射光に基づいて前記被検査物の欠点を検査するデータ処理手段とを有する検査装置であって、前記データ処理手段は欠点箇所抽出手段と欠点分類手段と調整手段とから構成され、前記調整手段は、前記欠点分類手段の出力に基づいて、前記欠点箇所抽出手段における、欠点箇所を検出するための閾値および/またはフィルタを調整するものであることを特徴とする欠点検査装置。
(もっと読む)
エッジ画像のエッジ連結方法、輪郭抽出方法、輪郭抽出装置、輪郭抽出プログラム及びコンピュータで読み取り可能な記録媒体
【課題】輪郭抽出技術において、一般的なエッジ連結処理にて連結できなかった線分を適切に連結する。
【解決手段】複数のエッジを含むエッジ画像において、該複数のエッジの中から対応するエッジ同士を連結する方法であって、計測領域を複数の分割小領域に分割して各々小領域番号を付与すると共に、各エッジに対して個別のエッジラベルを付与する工程と、各分割小領域に含まれるエッジの分布から、エッジが途切れている分割小領域を抽出する工程と、エッジが途切れている分割小領域において、近傍のエッジラベルから接続すべきエッジ同士の対を推定する工程と、推定されたエッジ対同士を連結する工程とを含む。これにより、途切れたエッジ同士を正確に連結できる。
(もっと読む)
計測用内視鏡装置
【課題】操作の煩わしさを低減し操作性を向上することができる計測用内視鏡装置を提供する。
【解決手段】基準点指定部18bは、計測対象物上の2つの基準点を指定する。基準曲線算出部18cは、基準点に基づいて、計測対象物の輪郭を近似する基準曲線を算出する。欠損構成点算出部18dは、基準点および基準曲線に基づいて、計測対象物に形成された欠損の輪郭を構成する欠損構成点を算出する。欠損サイズ算出部18fは、欠損構成点に基づいて欠損のサイズを計測する。2つの基準点を指定すれば欠損サイズの計測が可能となるので、操作の煩わしさを低減し操作性を向上することができる。
(もっと読む)
基準モデル作成方法および基準モデル作成装置
【課題】ワークを撮像する際の照明環境に合った基準モデルを作成する。
【解決手段】ワークの位置を検出するための画像検出用の基準モデルを作成する基準モデル作成方法であって、ワークを撮像して得られる画像データから当該ワークの観測モデルを作成する段階(ステップS3)と、予め記憶されている前記ワークの設計モデルと前記観測モデルとを整合して、前記設計モデルと前記観測モデルとに共通して含まれるエッジ要素を抽出する段階(ステップS4)と、前記抽出されたエッジ要素を前記基準モデルとして記憶する段階(ステップS5)と、を有することを特徴とする基準モデル作成方法。
(もっと読む)
MPR表示装置及びコンピュータ断層撮影装置
【課題】操作者が意図する任意の座標で被検体の断面像を作成しMPR表示する。
【解決手段】被検体12の複数の断面像である3Dデータを記憶する記憶手段24,25と、回転角度φ,θ,ωを設定する座標位置設定部42と、アキシャル断面像作成部43と、3Dデータから、アキシャル座標軸x,y,zの中の1つの軸aを回転軸とし、角度φ回転させて断面したオブリーク断面像を作成し表示するオブリーク断面像作成部44と、3Dデータから、軸a1を回転軸とし、角度θ回転させて断面したダブルオブリーク断面像を作成し表示するダブルオブリーク断面像作成部45と、3Dデータから、軸a2を回転軸とし、角度ω回転させてトリプルオブリーク座標軸x3,y3,z3の中の1つの軸a3に垂直なトリプルオブリーク断面像を作成するトリプルオブリーク断面像作成部46とを備えたMPR表示装置である。
(もっと読む)
画像処理装置
【課題】再登録の検査基準となる画像の位置ずれに応じて適切に対応できる画像処理装置を提供する。
【解決手段】再登録の検査基準となる画像と、元の検査基準の検査画像との間に位置ずれがある場合に、前記位置ずれが所定の許容範囲内であると確認されたとき、少なくとも元の検査画像に対して設定された検査領域を前記位置ずれに応じて位置補正し、新たな検査基準として当該位置補正した検査領域を再登録する。したがって、再登録の検査基準となる画像の位置ずれが許容範囲内か否か確認できるので、当該位置ずれに対して適切に対応することができる。
(もっと読む)
画像処理システム用照明装置及び画像処理システム
【課題】高精度の画像処理を行うことが可能な画像処理システム用照明装置及び画像処理システムを提供する。
【解決手段】本発明は、部品Wに照明光を照射して取得した画像を処理して、部品Wの形状、向き、位置等を特定する画像処理システム1用の画像処理システム用照明装置5であって、部品Wの一方から部品Wに照明光を照射する照明部15と、部品Wを挟んで照明部15と対向する側に設けられ、照明光を反射する反射面を有する反射部材16とを備え、反射面は、照明部15から照射された照明光が部品Wに向かって集光される形状を有することを特徴とする。
(もっと読む)
3次元形状測定システム、及び、3次元形状測定方法
【課題】被計測体が転動しているか否かに関わらず、撮影装置を短時間で容易に設定して被計測体同士W89を測定することができる3次元形状測定システム、及び、3次元形状測定方法を提供することを課題とする。
【解決手段】タイヤリム組立体13の表面に複数のマーカー12を配置する。そして、各マーカー12が配置されている領域Qに、赤、緑、青の三色の照明光を照射するとともに赤色光及び青色光の光量をタイヤ側面に沿った水平方向に変化させて照射しつつ、領域Qをビデオカメラ16、18で撮影し、ビデオカメラ16、18で撮影された画像データを演算処理することにより、ビデオカメラ16、18の設置位置を調整するとともに、光量の空間的な変化に基づく座標のマッチングを行いつつ各マーカー12の3次元座標を算出する。
(もっと読む)
画像処理方法及び画像処理装置
【課題】 様々な性質を有するRGB入力画像に対し、色相や彩度に応じて適切に色補正処理や色加工処理を施すこと。
【解決手段】 任意のRGB色空間で表現される入力カラー画像信号に対する色相を検出し、要求された色補正処理を施す画像処理方法において、前記RGB色空間で表現される入力カラー画像信号から変換した色平面を表す2次元の画像信号に基づいて色相領域を判定する際、前記RGB色空間の性質に応じた色相領域の判定を行うことを特徴とする。
(もっと読む)
長尺物の外観検査方法及びその装置
【課題】外観検査を高精度で行うことのできる長尺物の外観検査方法及びその装置を提供する。
【解決手段】各照射装置10に対してホースHを長手方向に移動させながら、照射線Lを所定時間おきに撮像し、各撮像データからホースHの各幅方向位置と照射線Lの高さ方向位置とを対応させた高さ方向位置データをそれぞれ抽出し、各高さ方向位置データを基準データによって減算処理するとともに、減算処理された各高さ方向位置データを所定の色調基準に基づき撮像順に並べて検査用画像を作成する上で、減算処理対象の高さ方向位置データ及びその高さ方向位置データと撮像順が近い所定回数分の減算処理前の高さ方向位置データをホースHの各幅方向位置ごとに平均化して基準データを作成する。これにより、ホースHがうねりを伴っている場合でも、高さ方向位置データからうねり分がキャンセルされる。
(もっと読む)
計測用内視鏡装置およびプログラム
【課題】操作の煩わしさを低減し操作性を向上することができる計測用内視鏡装置およびプログラムを提供する。
【解決手段】基準点指定部18bは、計測対象物上の2つの基準点を指定する。基準曲線算出部18cは、基準点に基づいて、計測対象物の輪郭を近似する基準曲線を算出する。欠損構成点算出部18dは、基準点および基準曲線に基づいて、計測対象物に形成された欠損の輪郭を構成する欠損構成点を算出する。欠損サイズ算出部18fは、欠損構成点に基づいて欠損のサイズを計測する。階調削減部18hは、映像信号に基づいた画像の階調を削減する。
(もっと読む)
拡大観察装置、高階調画像ファイル作成方法、高階調画像ファイル作成方法、高階調画像ファイル作成プログラム及びコンピュータで読み取り可能な記録媒体
【課題】高階調画像を汎用的な画像ファイル形式で保存して利用性を高める。
【解決手段】最小輝度と最大輝度の比である所定のダイナミックレンジを有する原画像を撮像するための撮像部10と、同一の観察位置において異なる撮像条件で撮像された複数枚の原画像を合成して、該原画像の階調幅よりも高階調な合成画像データを生成するための合成画像生成手段85と、撮像部10で撮像した画像を表示するための表示部52と、合成画像生成手段85で生成された合成画像データを、表示部52での表示が可能な階調幅の低階調画像データに変換するための階調変換手段86と、低階調画像データを保存する画像ファイルとして、元となる合成画像データを保存するための高階調画像領域を含めた高階調データ添付表示ファイルを生成可能な階調データ保存手段を備える。
(もっと読む)
2次元画像による3次元組立て検査
組立て検査の方法と装置を開示する。画像を同時に収集する3台のカメラによる三角測量を用いた、各サブコンポーネントの3次元位置測定を実行する。オペレータは、カメラを用いた組立ての同じサブコンポーネントに対応した1つの2次元モデルを学習させる。実行時間中、各モデルは各カメラの視野に記録されて、サブコンポーネントの測定された3次元位置を提供する。そして、測定された3次元位置は、期待される名目上の3次元位置と比較されて、3次元位置における差異が許容範囲にあるか照合される。本発明は、アセンブリ検査を簡素化するものであり、組立てライン上に固定された複数のカメラのみを必要とする。わずかなオペレータの作業の後に、本発明は自動的に組立て検査を実行する。本発明は、固定冶具を用いずに組立て検査を実行するので、機械視覚システムに、任意の3次元位置と向きを備えた部品が提供される。高速に移動する組立てライン上の部品を照明するために、ストロボ照明を利用することができる。 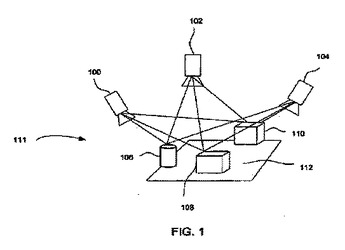 (もっと読む)
(もっと読む)
181 - 200 / 447
[ Back to top ]