
Fターム[5B057AA01]の内容
Fターム[5B057AA01]の下位に属するFターム
物流、搬送品 (951)
Fターム[5B057AA01]に分類される特許
221 - 240 / 447
欠陥検出装置、欠陥検出方法、イメージセンサデバイス、イメージセンサモジュール、欠陥検出プログラム、およびコンピュータ読取可能な記録媒体

【課題】イメージセンサ画像の欠陥領域を強調することによって、精度よく欠陥領域を検出することが可能な欠陥検出装置および欠陥検出方法を実現する。
【解決手段】欠陥検出装置1は、欠陥領域を検出する対象となる検査対象画像の欠陥領域が、検査対象画像の他の領域に対して強調されるように、検査対象画像内の画素値を補正する画素値補正部16と、画素値が補正された検査対象画像を複数のブロックに分割すると共に、各ブロック内に存在する画素の画素値を加算した値であるブロック加算値、またはブロック加算値を、各ブロック内に存在する画素数で割ることによって求めた値であるブロック平均値を求めるブロック分割処理部17と、ブロック加算値またはブロック平均値の外れ値があるか否かを、統計処理部18の統計処理により判定することで上記欠陥領域の有無を判定する良否判定部19とを備える。
(もっと読む)
外観検査装置および外観検査方法

【課題】大きさや形状が異なるむらが混在する場合においても、むらの検出を安定して自動的かつ効率的に行うことができる外観検査装置及び外観検査方法を提供する。
【解決手段】中心領域平均算出部14は、対象画素に対応する中心領域における輝度(画像データにおける各画素の濃淡値)の平均値(中心領域平均輝度)を算出する。周辺領域1平均算出部151〜周辺領域N平均算出部15Nは、同様に、この中心領域に対応する周辺領域1〜周辺領域Nにおける各画素の濃淡値の平均値(周辺領域N平均輝度)を算出する。次に、平均差分算出部16は、中心領域平均輝度と周辺領域1平均輝度〜周辺領域N平均輝度との差分値(差分値1〜差分値N)を算出する。さらに、平均差分算出部16は、差分値1〜差分値Nの中から代表値(代表差分値)を抽出する。この外観検査装置1においては、この代表差分値を用いてむらの検出を行う。
(もっと読む)
監視装置と監視方法、および制御装置と制御方法
【課題】画像処理のタイミングを画像処理部で自律的に決定し、その結果設備の動作時間を短縮する。
【解決手段】設備1は、第1の可動部材3と第2の可動部材5を有し、カメラ6で第1の可動部材3を監視している。画像処理部7では、カメラ6で撮像された画像を所定時間ごとに入力して、画像上の所定の位置に第1の可動部材上の特徴部分4があるかないかを判定する。第1の可動部材3が位置p1にあり、第2の可動部材5が位置p3に退避するとき、特徴部分4は画像上の所定の位置に現れる。画像処理部7は、この特徴部分4の存在の判定に同期して、第1の可動部材を監視するための画像処理を開始する。
(もっと読む)
欠陥検査装置および欠陥検査方法
【課題】欠陥を精度よく検出できる欠陥検出装置および欠陥検出方法を提供する。
【解決手段】輝度取得手段31は、カメラ2による撮影画像に基づいて、画面1Aの輝度分布を取得する。合成手段32は、輝度取得手段31により取得された複数の輝度分布を合成する。欠陥抽出手段33は、合成手段32により得られた輝度分布に基づいて画面1Aの欠陥を抽出する。動作制御手段34は、パネル駆動装置11を制御する。
(もっと読む)
3次元形状測定方法および校正用物体
【課題】 測定カメラ4R,4Lを長尺状の測定対象物OBに対して長軸方向に移動させて測定対象物OBの3次元形状を測定する場合において、測定精度のよい3次元形状測定を行うことができる3次元形状測定方法を提供すること。
【解決手段】 校正用物体10を長軸方向に沿って複数に区分し、各領域に基準座標系上で定義された少なくとも2つの基準平面(平面a,b,e,f)と、基準座標系上で少なくとも1つの基準点(頂点d,h)を定義可能な基準形状(切り込み平面c,g)とを設ける。この校正用物体10を測定し、区分された領域ごとに座標変換関数を計算する。そして、測定対象物OBも校正用物体10と同じように長軸方向に領域を区分し、点群データを区分した領域ごとに、その領域に対応する座標変換関数を用いて座標変換する。
(もっと読む)
表示検査方法、表示検査装置および表示検査プログラム
【課題】検査対象の表示文字列を文字コードに変換して認識することを要することなく、上記表示文字列が正常に表示されているか否かの検査を行う。
【解決手段】項目表示領域21内に表示されている表示文字列のキャプチャ画像を取得する一方で、検査対象のソフトウエア(プリンタドライバ)に組み込まれるリソースファイル内の文字コード、対応関係情報及び属性情報等に基づき正解となる比較用文字列画像を生成する。そして、キャプチャ画像と比較用文字列画像とを画像比較して文字欠けの有無等を検査する。
(もっと読む)
画像処理装置、及び画像処理方法
【課題】簡単な作業で効率良く寸法測定等を行なうようにする。
【解決手段】円形マーク3を計測対象物A2の正面部分B2に貼り付け、該計測対象物A2を不図示のデジタルカメラで撮影する。該マーク3の画像上の形状から、射影変換に必要な変換係数を求めて射影変換を行なう。また、該マーク3の画像上の寸法が目標値に一致するように、画像の拡大又は縮小を行なう。これにより、所定の縮尺のオルソ画像が得られ、該画像に基づき寸法測定等を行なうことができる。この寸法測定に際して、計測対象物A2を実測したりする必要が無いため、簡単な作業で効率良く寸法計測等を行なうことができる。
(もっと読む)
3次元表面形状再構築のための装置および方法
【課題】3線テンソルを使用して、ローカル3D表面形状を再構築する。
【解決手段】システムは、3ビュー光学ヘッドと、機械式マニピュレータと、ローカル3D表面形状再構築ユニットと、表面形状スティッチユニットとを含む。3ビュー光学ヘッドは、物体の少なくとも一部分の少なくとも3つのビューを生成するように動作可能である。機械式マニピュレータは、物体の第1の部分が見える第1の相対的向きから、第1の部分とオーバラップする部分が見える第2の相対的向きまで、物体と光学ヘッドとの向きを変更するように動作可能である。ローカル3D表面形状再構築ユニットは、光学ヘッドによって生成された第1および第2の部分の3つのビューのうちの少なくとも2つに基づいて、表面形状のローカル再構築を生成するように動作可能である。表面形状スティッチユニットは、物体の第1および第2の部分の相対位置を決定するように動作可能である。
(もっと読む)
光学デバイスの外観検査装置とその検査方法、プログラム、及び記録媒体
【課題】光学デバイスの有効範囲領域を精度よく判別できる光学デバイスの外観検査装置を提供する。
【解決手段】外観検査装置1は、検査対象の光学デバイス2を載置する載置台3と、載置台3に載置された光学デバイス2を裏面より斜めに照明する照明具4と、載置台3に載置された光学デバイス2を撮影するカメラ5と、カメラ5により撮影した撮影画像を表示するモニター6と、モニター6に表示された光学デバイス2の外形領域及び有効領域範囲を示す枠画像が、モニター6に適切な位置に表示されるように制御する表示制御装置7とにより構成される。
(もっと読む)
画像処理装置、画像読取装置、検査装置および画像処理方法
【課題】異物等の被検出体を精度良く認識する。
【解決手段】本発明に係る画像処理装置は、被検出体を含むシート状物を表す画像データを取得し(ステップSa)、その端部領域の階調値を「0(白)」に変更する(ステップSb)。その後、画像処理装置は、この画像データに平滑化処理、膨張処理、二値化処理などの画像処理を施すことによりオブジェクトを抽出し(ステップSc)、抽出したオブジェクトのなかから、被検知体に相当するオブジェクトを特定する(ステップSd)。このようにすることで、カールやスキューに起因して生じる認識率の低下を抑えることが可能となる。
(もっと読む)
鉄系構造物の腐食評価方法
【課題】被測定部の表面状態によらず鉄系構造物の腐食度合を評価できる腐食評価方法を提供する。
【解決手段】サインポール1の画像データに基づいて錆が発生していない部位を基準表面として選択するステップ3と、この基準表面に対する被測定部の明度Lと色度a、bの差ΔL*、Δa*、Δb*に基づいて色差ΔE*abを算出して色差ΔE*abがしきい値を超える部位に錆部分抽出ウィンドゥを設定するステップ4と、色差ΔE*abから明度Lの成分を除いた色度差△abを算出して色差ΔE*abと色度差Δabとの比較に基づいて錆の進行状態を分類するステップ6と、錆部分抽出ウィンドゥ内の色度差Δabデータおよび色差ΔE*abデータの少なくとも一方に基づいて腐食度合を評価するステップ7,8とを含む。
(もっと読む)
画像処理装置および画像処理方法
【課題】ユーザが適切なフィルタ処理を容易に選択することが可能な画像処理装置および画像処理方法を提供する。
【解決手段】画像処理装置201は、設定モードにおいて、複数種類のフィルタ処理内容を表わす複数個の画像を選択肢として表示する表示部4と、設定モードにおいて、選択肢として表示された複数個の画像の中からユーザが選択した画像を認識する操作部4と、トリガ入力に応じてもしくは周期的に入力画像に対して画像処理を行なう処理モードにおいて、操作部が認識した画像に対応するフィルタ処理を入力画像に対して行なう画像処理部61とを備える。
(もっと読む)
画像解析装置、画像解析方法及びコンピュータプログラム
【課題】画像中の「シミ」部分の自動的な検出を精度高く、高速に行える画像解析装置、画像解析方法及びコンピュータプログラムを提供する。
【解決手段】本発明の画像解析装置1は、検査対象となる原画像データからシェーディング及び画像毎やサンプル毎の輝度のバラつきを除去した差分画像データを生成する差分画像生成部101と、前記差分画像データを構成する所定サイズのブロック毎の基本統計量を取得する基本統計量取得部102と、前記基本統計量を使用して、前記差分画像データを正規化した正規化画像データを生成する正規化画像生成部103と、前記正規化画像データから所定条件を満たす特異画素を検出するクラス分け処理部104と、検出した前記特異画素の中から連続した位置関係にあるものを検出する塊検出部105と、該塊検出部105の検出結果に基づき、前記原画像データの良否を判定する判定処理部106と、を備える、ことを特徴とする。
(もっと読む)
画像処理装置、画像処理方法、プログラム、および記録媒体
【課題】従来の画像処理装置においては、輝度ムラを確実に除去することができないという課題があった。
【解決手段】補正対象となる複数の画素を含む画像の情報である画像情報を取得する画像情報受付部101と、画像情報を用いて、画像情報が示す画像全体の輝度の代表値である全体代表輝度値を算出する全体代表輝度算出部103と、画像情報を用いて、補正対象となる複数の画素のそれぞれを囲む互いに異なる領域についての輝度の代表値である領域代表輝度値を、それぞれ算出する領域代表輝度算出部104と、画像情報に含まれる前記補正対象となる複数の画素の輝度を、全体代表輝度値と当該補正対象となる複数の画素に対応して算出された前記領域代表輝度値とを用いて、それぞれ補正する補正部105と、補正部105が輝度を補正した複数の画素を含む画像情報を出力する出力部107とを具備するようにした。
(もっと読む)
撮像装置、画像処理装置、及び画像処理方法
【課題】ユーザの望む最適な露出の画像を得るとともに、手ぶれの発生を抑えることのできるオートブラケット撮影を可能にする。
【解決手段】露出条件の異なる3枚の画像データ(アンダー露出、中心露出、オーバー露出)を得るオートブラケット撮影を行うことのできるデジタルカメラであって、光電変換を行う撮像素子107と、撮像素子107により取得される複数の画像データを合成する画像信号処理回路109とを備え、アンダー露出条件で撮影を実行し、それにより取得される画像データの合成枚数を異ならせて、前記露出条件の異なる3枚の画像データを得る。
(もっと読む)
瓶或いは同様な容器を検査或いは監視する方法並びに瓶或いは同様な容器を検査する装置
【課題】
偶発的に存在する固体或いは異物に関して液体或いは液状充填材を充填された容器の確実な検査を高い出力により可能とする方法を提供すること。
【解決手段】
充填材を充填した瓶或いは同様な容器を検査する方法であって、容器が光電式或いは電磁式画像検出加工システム或いは分析システムにより液状充填材に偶発的に含有された固体或いは異物を監視されて、しかも、光電式或いは電磁式センサーシステムの画像形成に基づいて監視されている。 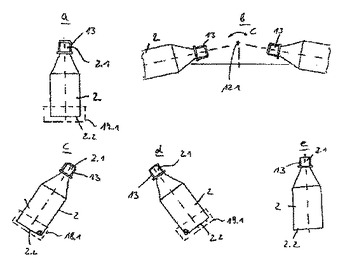 (もっと読む)
(もっと読む)
欠陥検出方法、欠陥検出プログラムおよび検査装置
【課題】群化した点欠陥を一群の欠陥として精度良く検出できる欠陥検出方法、欠陥検出プログラムおよび検査装置を提供すること。
【解決手段】点欠陥強調工程(ST2)において、撮像画像中の点欠陥候補を強調して検出しやすくしておいてから、領域検索工程(ST3)にて所定領域内の点欠陥候補d個数を検出し、領域判定工程(ST4)にて領域が対象領域か否かを判定することで、撮像画像中に点欠陥候補がある程度以上に集まった(群化した)領域を対象領域として判定する。そして、群化状態算出工程(ST6)にて点欠陥候補の群化状態を算出してから、欠陥分類工程(ST7)にて群化状態が面欠陥候補であるかを判定し、欠陥検出工程(ST8)にて面欠陥検出用の閾値を用ることで、群化点欠陥を面欠陥として精度良く検出し、欠陥判定精度を向上させることができる。
(もっと読む)
幾何学的フィーチャーを定義し、識別し、及び学習するための方法及びシステム
【課題】内部又は外部表面及びエッジ、あるいは、画像形成することができるか又は数値的に定義することができる物体の他のフィーチャーを含むシステムの提供。
【解決手段】幾何学的フィーチャーのエッジの幾何学的形状を定義する方法であって、
(A)少なくとも1つの数学的実体を前記幾何学的形状とマッチングさせる段階であって、前記配列がそこから前記対応する前記実体の再構築を可能にするように、前記又は各々の前記実体は属性値を有する予め定められた配列によって実現することができる、前記マッチングさせる段階と、(B)前記又は各々の前記実体に対して、そこから対応する前記実体の再構築を可能とするに十分な情報を提供するように、対応する予め定められた属性値の組から選択された前記属性値を各々の前記属性に適用し、かつ前記選択された属性値に基づいてテキスト・ストリングを生成し、これにより前記エッジの幾何学的形状を定義する段階と、を備える方法が提供される。
(もっと読む)
画像処理による車両のホイル中心位置計測装置
【課題】車両のホイルの形状中心を正確に計測することを可能とする画像処理による車両のホイル中心位置計測装置を提供する。
【解決手段】ドラム1上に設置される車両2の性能試験時に車両2のホイル21の中心位置を計測する画像処理による車両のホイル中心位置計測装置を、ホイル21の回転中心に施されたマーカを撮像し、撮像した画像を出力するカメラ3と、予め登録されたマーカの情報に基づいて、カメラ3から入力された画像中からマーカを抽出し、抽出したマーカの画像中の位置からホイル21表面におけるマーカの位置を算出し、算出したマーカの位置をホイル21の回転中心位置として検出する画像処理部4とからなる構成とした。
(もっと読む)
欠陥検査装置
【課題】
(1)群欠陥判定の処理時間の短縮。
(2)レンズの収差による誤判定の抑制による、群欠陥の検出精度の改善。
(3)群判定のための条件設定の工数の削減。
(4)ハードウェア変更に対する条件設定の工数の削減。
(5)検査対象のサブピクセル形状の変更に対する汎用的に維持。
を実現した欠陥検査装置を提供する。
【解決手段】 複数個のサブピクセルからなるピクセルが集合した検査対象の検査エリアを撮像した画像データを処理し、この処理により計算される特徴量から識別された前記サブピクセルの単独欠陥の密集態様に基づいて群欠陥を識別する欠陥検査装置において、
前記識別された単独欠陥の固有情報を抽出する単独欠陥固有情報抽出手段と、
抽出された前記単独欠陥の固有情報を、前記検査エリアにマッピングする単独欠陥情報マッピング手段と、
マッピングされた前記単独欠陥情報の密集態様を示す特徴量に基づいて群欠陥の分類処理を実行する特徴量マッチング手段と、
を備える。
(もっと読む)
221 - 240 / 447
[ Back to top ]