
Fターム[5B057CA13]の内容
画像処理 (340,757) | 処理部 被処理対象画像の特性 (80,570) | 3次元、ステレオ画像 (1,659)
Fターム[5B057CA13]に分類される特許
281 - 300 / 1,659
仮想内視鏡画像処理装置、方法、及びプログラム
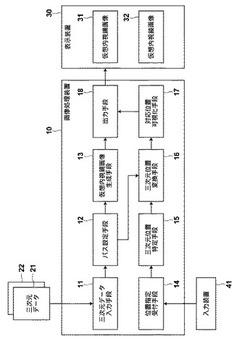
【課題】三次元データを可視化した2つの仮想内視鏡画像の一方で位置指定を行ったとき、他方の仮想内視鏡画像における対応位置の状態を簡易に観察することを可能にする。
【解決手段】仮想内視鏡画像生成手段13は、第1及び第2の三次元データ21、22に基づいて、第1及び第2の仮想内視鏡画像を生成する。位置指定受付手段14は、第1の仮想内視鏡画像上で位置の指定を受け付ける。三次元位置特定手段15は、ユーザの指定位置に該当する第1の三次元データ21中の三次元位置を特定する。三次元位置変換手段16は、ユーザの指定位置に該当する第1の三次元データ21中の三次元位置を第2の三次元データ22中の三次元位置に変換する。対応位置可視化手段17は、ユーザの指定位置に対応する第2の三次元データ22中の三次元位置部分を可視化して表示する。
(もっと読む)
顔画像合成装置

【課題】登録対象者が異なる表情をして写っている複数の顔画像から、照合に適した顔画像を合成可能な顔画像合成装置を提供する。
【解決手段】顔画像合成装置1は、対象者を撮影した複数の顔画像を3次元顔形状データにマッピングして各顔画像に対応する3次元顔モデルを作成するマッピング部53と、複数の3次元顔モデルのそれぞれを2次元に展開した展開顔画像を生成する展開顔画像生成部54と、複数の展開顔画像から少なくとも第1の展開顔画像と第2の展開顔画像を選択するとともに、予め設定された境界線候補の中から、顔の所定部位を回避する境界線候補を選択して合成境界に設定する顔画像選定部55と、第1の展開顔画像において顔のテクスチャ情報を有する第1の領域と第2の展開顔画像において顔のテクスチャ情報を有する第2の領域とを合成境界に基づいて合成し、合成顔画像を作成する顔画像合成部57とを有する。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム、及び立体内視鏡装置
【課題】画像を参照する参照者の疲労感や緊張感を緩和させる。
【解決手段】内視鏡による広角側撮影画像(2D画像)、立体視用画像(3D画像)およびナビゲーション用の画像(全体画像)を取得し、2D画像の一部に3D画像を表示させ(ステップ100〜108)、3D画像への術者の視線滞留時間が所定時間T0以上で、3D画像表示領域を徐々に広げ(ステップ110〜114)、術者の2D画像と3D画像間の視線移動が所定頻度h1以上で3D画像表示領域を徐々に狭くする(ステップ116〜134)。
(もっと読む)
3次元医用画像に基づいて立体視用画像を生成する装置および方法、並びにプログラム
【課題】3次元医用画像から立体視用の画像を生成する装置および方法、並びにプログラムにおいて、立体視出力が不適切な場合や不要な場合にも柔軟かつ適切に対応できるようにする。
【解決手段】立体視用画像生成部11が、被検体を表す3次元医用画像を入力として、所与の画像生成条件に基づいて、被検体の立体視出力を行うための立体視用画像を生成するとともに、非立体視用画像生成部12が、3次元医用画像と立体視用画像の生成条件とに基づいて、立体視出力と等価な非立体視出力を行うための非立体視用画像を生成する。
(もっと読む)
自由視点画像生成装置
【課題】被写体が不動の物体に限定されず、しかも設置が容易で小型且つ安価な自由視点画像生成装置を提供する。
【解決手段】画像処理コンピュータ14により、左カメラCL および右カメラCR により直接撮像された一対の直接被写体画像GL および直接被写体画像GR と、二対の間接被写体画像GLML 、GRML および間接被写体画像GLMR 、GRMR と、それらの直接被写体画像および間接被写体画像から求められた奥行き値Zとに基づいて仮想視点画像GK が生成される。左カメラCL および右カメラCR の1回の撮像により、上記直接被写体画像および間接被写体画像が同時に得られることから被写体12が不動の物体に限定されず、しかも、左ミラーML および右ミラーMR から手前位置に一対の左カメラCL および右カメラCR を設置すればよいので、設置が容易で小型且つ安価な自由視点画像生成装置10が得られる。
(もっと読む)
移動体軌跡図作成装置及びコンピュータプログラム
【課題】 移動体の撮影画像の処理に対してPTV法を用いなくても、移動体の軌跡画像の三次元表示を可能とする技術を提供する。
【解決手段】 複数のカメラにより撮影された時系列の画像データから、カメラ毎に、移動体の二次元軌跡画像を作成する手段11を有している。これにより、鳥等の移動体の二次元軌跡画像がカメラ毎に複数枚得られることになる。この二次元軌跡画像は線状の静止画像であるため、バイプレーン法等の三次元軌跡画像再構成手段を適用することで、容易に移動体の三次元の軌跡図を作成することができる。ステレオPTV法を用いる必要がなくなるため、屋外フィールドの鳥などの移動体の軌跡図作成用として適している。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム、及び複眼デジタルカメラ
【課題】誤補正を抑制し、精度の高い視差マップを生成する。
【解決手段】左画像と右画像とを左画像を基準としてステレオマッチングにより対応させて視差マップを生成する。視差マップ上に注目画素を設定し、注目画素に対応する左画像上の画素(左画像注目画素)を中心とした所定サイズのウインドウを左画像に設定し、ウインドウ内に含まれる画素のうち、左画像注目画素のRGB値と近いRGB値を持つ画素を抽出し、抽出された画素の各々に対応する視差マップ上の画素の各々の視差を視差ヒストグラムにエントリして視差ヒストグラムを生成する。注目画素の頻度が所定値未満の場合には、視差ヒストグラムの最頻値の視差で、注目画素の視差を補正する。
(もっと読む)
車両周辺表示装置
【課題】画像の視認によって障害物の存在を分かり易く伝えることができる車両周辺表示装置の提供。
【解決手段】車両90の後方領域93の画像1を液晶ディスプレイ80に表示する車両後方表示装置100において、後方領域93を撮影し障害物画像7を含む後方画像3を生成するカメラ60及びデコーダ70と、障害物97を検出し車両90から当該障害物97までの距離BDを演算する複数のソナー20r,20c,20l及び演算装置10と、障害物画像7に対応する障害物97の存在を警告する警報画像5を、後方画像3に重畳することにより、液晶ディスプレイ80に表示される画像1を描画する描画装置40と、を備える。警報画像5は、上下方向の長さが予め固定された枠状の枠画像部5aと、枠画像部5a内に描画され、障害物97までの距離が縮小するほど上下方向における長さが縮小する距離表示画像部6と、を含む。
(もっと読む)
3次元位置合わせにおける照合方法およびそのプログラム
【課題】精度よく3次元位置合わせが可能な照合方法及びプログラムを提供すること。
【解決手段】対象物の画像データから第1及び第2の3次元復元点集合、第1及び第2特徴量集合を求めるステップS2〜4と、
第1及び第2特徴量集合を照合して、第1及び第2の3次元復元点集合の対応点を決定するステップS5〜10とを含み、
第1及び第2の3次元復元点集合がセグメントの3次元位置座標を含み、
第1及び第2特徴量集合がセグメントの頂点に関する3次元情報を含み、
ステップS5で、第1及び第2の3次元復元点集合のセグメントの初期照合を行い、
ステップS6で、第1特徴量集合の中から特徴点を選択し、
ステップS7で、選択された特徴点を含む調整領域を指定し、
ステップS8において調整領域に含まれる第1及び第2の3次元復元点集合のセグメントに関して照合の微調整を行い、
調整領域を拡大及び特徴点を選択する毎にステップS6〜8を実行する。
(もっと読む)
医用画像変換装置および方法並びにプログラム
【課題】一連の医用画像を例えば時系列順に表示する場合に、異なる組織を区別できるようにする。
【解決手段】位置合わせ部30が、3次元ボリュームデータ群110を構成する3次元ボリュームデータ100の画素位置を、3次元ボリュームデータ100間において位置合わせすることにより対応づける。変換部40が、基準となる第1の信号値を第1の軸Xに、第1の信号値を変化させた第2の信号値を第2の軸Yに、第1および第2の信号値に対する色(R,G,B)および不透明度を第3の軸Zに設定してなる2次元ルックアップテーブルからなるカラーテンプレート120を選択し、すべての3次元ボリュームデータ100の各画素位置の信号値を、選択したカラーテンプレート120により表示画素値に変換する。
(もっと読む)
対応点探索装置
【課題】処理コストを増大させなくても精度良く対応点を探索し、かつ、大きな処理対象外の領域が発生することを防止する。
【解決手段】信頼度算出部50は、探索部30により探索された各対応点の探索結果を基に、各対応点の探索精度を示す信頼度を算出する。変更部60は、信頼度が所定の値よりも低い対応点を、参照画像上の別の点に変更する。決定部70は、探索部30により探索された対応点、又は変更部60により変更された対応点を基に、注目上階層の参照画像における初期探索点を決定する。探索制御部40は、決定部70により決定された初期探索点を基準として、注目階層の1つ上の階層の参照画像における探索範囲を設定し、探索範囲内において探索部30に探索処理を実行させ、当該探索処理が下位の階層から上位の階層に向けて実行されるように探索部30を制御する。
(もっと読む)
マンコンベア画像処理装置
【課題】エスカレータの乗客の3次元の監視領域を精度よく設定する。
【解決手段】画像処理装置24は、ステレオカメラユニット21のカメラ22a,22bにより得た撮影画像を入力する。画像処理装置24は、撮影画像中の設定対象の3次元の監視領域の特徴部分を検出する。画像処理装置24は、検出された特徴部分の情報をもとに当該特徴部分の3次元情報を取得して、3次元の監視領域を設定する。エスカレータ1の通常運転の開始後、画像処理装置24は、撮影画像を解析して乗客の位置を検知する。画像処理装置24は、撮影画像内の設定済みの3次元監視領域、およびエスカレータ1の運行情報に基づいて、乗客の挙動である乗り出しの有無を検知する。
(もっと読む)
同一人判定装置、同一人判定方法および同一人判定プログラム
【課題】複数の画像データ中の人物が同一人であるか否かを少ない演算量で判定すること。
【解決手段】同一人判定装置100は、第1の画像に含まれる第1の人物の第1の部位が、撮像装置のレンズの焦点からみて存在していた第1の方向と、第1の画像に含まれる第1の人物の第2の部位が、撮像装置のレンズの焦点からみて存在していた第2の方向と、第2の画像に含まれる第2の人物の第1の部位が、撮像装置のレンズの焦点からみて存在していた第3の方向と、第2の画像に含まれる第2の人物の第2の部位が、撮像装置のレンズの焦点からみて存在していた第4の方向とを算出する方向算出部143と、第1の方向と第3の方向の交点と、第2の方向と第4の方向の交点を算出する交点算出部144と、交点の距離を算出する二点間距離算出部145と、距離が所定の範囲内であるか否かに基づいて、同一人であるか判定する同一人判定部142とを備える。
(もっと読む)
三次元映像処理装置及び三次元映像処理方法
【課題】視聴者に与える不快感を軽減する。
【解決手段】主映像に重畳される左眼用画像と右眼用画像とを出画する三次元映像処理装置100であって、左眼用画像を出画する左眼用オブジェクト処理部210と、右眼用画像を出画する右眼用オブジェクト処理部220と、左眼用画像と右眼用画像とを同期させて出画するように、左眼用オブジェクト処理部210と右眼用オブジェクト処理部220とを制御する出画制御部230とを備え、左眼用オブジェクト処理部210は、左眼用画像の出画準備が完了しているか否かを判定する出画処理部215を備え、右眼用オブジェクト処理部220は、右眼用画像の出画準備が完了しているか否かを判定する出画処理部225を備え、出画制御部230は、左眼用画像及び右眼用画像の一方の出画準備が完了していないと判定された場合、左眼用画像及び右眼用画像の双方の出画をスキップさせる。
(もっと読む)
画像処理装置
【課題】従来の2次元画像処理装置と同様に、利用可能な処理項目を提示して3次元計測の処理のシーケンスを作成させるユーザインタフェースを持つ画像処理装置を提供する。
【解決手段】2次元画像処理の複数の項目、および3次元計測処理の少なくとも1つの項目が登録された画像処理装置において、ユーザによる処理項目の選択に応じて2つの画像A0,A1を用いた処理のシーケンスを設定して実行する。2次元画像処理の項目には、画像A0に対し、あらかじめ登録されたモデル画像との一致の程度が高い領域71の代表位置を特定する処理項目が含まれる。この処理項目を含むシーケンスに組み込まれる3次元計測用の項目は、画像A1に対し、上記のモデル画像との一致の程度が高い領域81の代表位置を特定する処理と、各領域71,81の代表位置を用いて3次元計測用の演算処理を実行する処理とを実行するように設計される。
(もっと読む)
仮想物体を現実の物理物体に変換する方法
顔画像合成装置
【課題】顔を照合するために有用な情報を劣化させることなく、合成された顔画像を作成可能な顔画像合成装置を提供する。
【解決手段】顔画像合成装置1は、同一人物を撮影した複数の顔画像を3次元顔形状データにマッピングして各顔画像に対応する3次元顔モデルを作成するマッピング部53と、複数の3次元顔モデルのうちの一つを基準顔画像として選択し、少なくとも他の一つを補完用顔画像として選択する顔画像選定部55と、基準顔画像の顔のテクスチャ情報が欠けていない第1の領域において顔のテクスチャ情報が欠けた第2の領域との境界からの距離に応じて大きくなる重み係数を算出する合成重み算出部56と、基準顔画像の第2の領域に補完用顔画像の対応する領域のテクスチャ情報を補完し、基準顔画像の第1の領域について重み係数を用いて基準顔画像と補完用顔画像の対応する画素の値を合成することで、合成顔画像を作成する顔画像合成部57とを有する。
(もっと読む)
距離取得装置
【課題】ステレオカメラで撮影したステレオ画像から、精度の高い距離測定を行うことができるとともに処理時間の短い距離取得装置を提供する。
【解決手段】ステレオカメラで撮影した複数のステレオ画像ペアを入力する画像入力手段8と、各画像ペアから視差を計算する複数の第一の視差検出手段11、12、13、14と、第一の視差検出手段により検出された視差が所定の範囲の場合に、前記視差検出に使用した画素を含む各画像ペアの一方の画像の領域において画素を補間する複数の画像補間手段と、前記画素補間された領域を使用して視差を計算する複数の第二の視差検出手段と、ステレオ撮像系の基線長に基づいて正規化する正規化手段と、正規化された視差を用いて視差類似評価を行う視差類似評価手段15と、距離検出手段16とを有し、視差評価において、視差検出1の結果と視差検出3の結果の二つだけを利用して視差評価を行う。
(もっと読む)
モデル作成装置およびモデル作成プログラム
【課題】対象物を複数のカメラで撮像して得られる画像データから3次元情報を取得し、当該取得した3次元情報を3次元モデルデータと照合することで、当該対象物について3次元認識を行う処理に用いられる、3次元モデルデータを容易に作成することが可能なモデル作成装置およびモデル作成プログラムを提供する。
【解決手段】本実施の形態に従う3次元モデルデータ作成処理においては、認識すべき対象物の設計データ(CADデータ)を用いて、3次元モデルデータを作成する。この作成処理は、コンピュータ上で実行される設計データに対する変換処理および編集の処理と、実用環境で実行されるティーチングの処理とを含む。3次元モデルデータの作成処理においては、ワークモデルWMを撮像する必要がない。
(もっと読む)
情報処理装置、プログラム、および情報処理方法
【課題】複数の画像間での対応点探索の精度を向上させ得る技術を提供する。
【解決手段】互いに対応する画像内容を含んだ基準画像と参照画像とを取得する画像取得手段と、前記基準画像に注目点を設定する設定手段と、前記基準画像と前記参照画像とのうち少なくとも一方の画像特性を反映する選択情報に基づいて、2以上の対応点探索手法のうちの1つを選択する選択手段と、選択された1つの対応点探索手法による探索結果を用いて、前記注目点の前記参照画像上の対応点を特定する探索手段と、を備える。そして、前記選択情報は、前記2以上の対応点探索手法のうち少なくとも一部の対応点探索手法について、前記基準画像と前記参照画像とを対象とする対応点探索への利用の適性を表現した適性情報となっている。
(もっと読む)
281 - 300 / 1,659
[ Back to top ]