
Fターム[5B057CA13]の内容
画像処理 (340,757) | 処理部 被処理対象画像の特性 (80,570) | 3次元、ステレオ画像 (1,659)
Fターム[5B057CA13]に分類される特許
361 - 380 / 1,659
映像処理装置、映像処理方法及びコンピュータプログラム
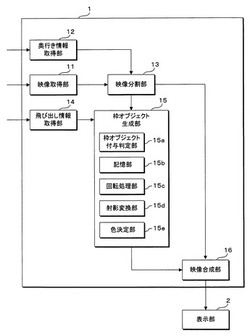
【課題】専用の映像表示装置及び特殊な眼鏡を用いず、画像処理のみによって映像の奥行き感を向上させることができる映像処理装置を提供する。
【解決手段】映像取得部11にて取得した映像の奥行き感を強調する処理を行う映像処理装置1に、前記映像を構成する複数の映像部分夫々の奥行き方向の距離を示した奥行き情報を取得する奥行き情報取得部12と、奥行き情報取得部12にて取得した奥行き情報及び前記映像に基づいて、映像を前景映像部分及び背景映像部分に分割する映像分割部13と、映像の奥行きを強調する枠オブジェクトを付与すべきか否かを判定する枠オブジェクト付与判定部15aと、枠オブジェクトを付与すべしと判定した場合、背景映像部分に、枠オブジェクトが重畳され、更に枠オブジェクトに、前景映像部分が重畳されるように各映像部分及び枠オブジェクトを合成する映像合成部16とを備える。
(もっと読む)
移動軌跡図作成装置およびコンピュータプログラム

【課題】 ハイエンドなハードウェアを採用せずとも、人為的条件に左右されにくい、これまでよりも客観的なデータ取得を実現可能な飛翔体軌跡算出の技術を提供する。
【解決手段】 前記複数箇所のそれぞれの撮影手段にて飛翔体を撮影した画像データおよびその画像データを取得した時刻データを記録する画像データ記録手段と、それぞれの画像データおよび時刻データを入力するデータ入力手段と、その時刻データを用いて画像データを同期させるデータ同期手段と、そのデータ同期手段にて同期された画像データから飛翔体が三次元空間を移動する軌跡を含む解析データを算出する3D算出手段と、その3D算出手段が算出した解析データを出力する解析データ出力手段と、を備えた飛翔体軌跡算出装置を提供する。
(もっと読む)
立体画像データ作成装置、立体画像データ出力装置及び三次元座標算出装置
【課題】よりデータ量を抑えた立体画像データを作成する立体画像データ作成装置を提供すること。
【解決手段】主カメラで撮影された主撮影画像51と副カメラで撮影された副撮影画像を取得し、それぞれ画像の各ピクセルの設定値の集合からなるピクセルマトリックスデータとして作成する。主撮影画像51と副撮影画像とに共通の基準ピクセル座標系を定め、それらに現れる、同一被写体に由来した画像領域同士である相関画像領域のピクセル対応関係を特定し、その対応ピクセル同士の基準ピクセル座標系における位置差分を演算する。そして副撮影画像のピクセルマトリックスデータを、相関画像領域の個々のピクセルに対応する演算した位置差分値の集合からなる位置差分マトリックスデータ62に変換する。さらに、位置差分マトリックスデータ62を、出現頻度の高い位置差分値ほどデータ圧縮率が高くなるように圧縮変換する。
(もっと読む)
車両周辺確認システム
【課題】ディスプレイに表示される自車周辺の画像のいびつな形状を解消することにより、ユーザに与える違和感を軽減し、ユーザに対し誤解を招かない車両周辺映像を与えることが可能な車両周辺確認システムを提供する。
【解決手段】一又は複数のカメラ2を通して、映像内の像の大きさが非特定領域よりも大きく、且つ該非特定領域に挟まれる特定領域の映像を取得する第1映像取得部31と、一又は複数のカメラ2を通して、映像内の像の大きさが特定領域よりも小さく、且つ該特定領域を挟む前記非特定領域の映像を取得する第2映像取得部32と、第1映像取得部31によって取得された非特定領域を基準として、第2映像取得部32によって取得された特定領域の映像の大きさを調整する映像調整部8と、映像調整部8によって調整された映像を表示する映像表示部9と、を備える。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】人間の視覚特性に基づいて単眼立体情報のパラメータを調整することで、人間にとってより違和感や不快感が少ない3次元画像を提供することができるようにする。
【解決手段】画像処理装置1のコントラスト調整部17は、奥行き情報抽出部12で抽出された奥行き情報から判断される、入力された3次元画像の手前側の領域または奥側の領域の少なくとも一方に対し、コントラスト抽出部15により抽出された3次元画像のコントラスト成分から、入力された3次元画像の現在の主観的に知覚される奥行き量をメモリ部16に記憶されている評価関数に基づいて算出し、算出された現在の主観的に知覚される奥行き量と、設定された奥行き調整量とに基づいて、入力された3次元画像のコントラスト成分を調整する。本発明は、例えば、3次元画像の画像処理を行う画像処理装置に適用できる。
(もっと読む)
カメラ及び検索パターンを使用して対象物の空間特性を決定するためのシステム、装置、方法、及びコンピュータプログラム製品
【課題】対象物ホルダの上面に配置した対象物を評価するためのシステム、装置、方法、及びコンピュータプログラム製品を提供する。
【解決手段】対象物ホルダ110を複数位置の各々に位置させながら、対象物102の取得部分の一部を現す少なくとも1つの第一フレームを取得する。対象物ホルダ110を各位置に位置させながら、対象物ホルダ110の少なくとも一つの別の面の取得部分を現す少なくとも1つの第二フレームを取得する。取得したフレームのうち少なくとも1つのフレームに基づいて、対象物102の取得部分に関連した少なくとも一つの空間特性を決定する。各第二フレームにおいて取得した複数の光学マーカーの値を決定する。ここで、少なくとも上記光学マーカーのうち少なくとも2つはそれぞれ異なった値を有する。少なくとも一つの異なる面の上記取得部分の値及び向きに関連した少なくとも一つの座標が決定される。
(もっと読む)
映像信号処理装置、仮想現実感生成システム
【課題】 複雑な画像処理演算を行うことなく簡単な処理を行うことができる映像信号処理装置、仮想現実感生成システムを提供する。
【解決手段】 歪み補正/画像処理ユニット3は、任意形状の投影面のスクリーン1に映像光を投影させる出力映像信号をプロジェクタ2a、2bに出力するために、平面の投影面に映像光を投影させるための平面映像信号を入力し、平面の投影面と任意形状の投影面のメッシュモデルとの対応マップである歪み補正テーブルを参照して、平面映像信号の画素ごとに歪み補正処理を施して、投影面に映像光を投影させるための出力映像信号を作成し、画像処理テーブルを参照して所定の画像処理を行って出力映像信号を作成する。そして、歪み補正/画像処理ユニット3により作成された出力映像信号をプロジェクタ2a、2bに出力する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】より高精度な奥行き推定を可能とすることにある。
【解決手段】画像処理装置110の超解像処理ユニット104は、複数の画像取得装置102より取得される被写体の画像データを高解像画像データに変換する。そして、画像処理装置110の奥行き計算ユニット108は、上記高解像画像データに基づいて被写体の奥行き情報を算出する。
(もっと読む)
物体検出装置および運転支援システム
【課題】周囲に存在する物体の部分のうち最も近接する位置にある部分までの距離の情報を的確に検出することが可能な物体検出装置を提供する。
【解決手段】物体検出装置1は、代表距離算出手段12が算出した各代表距離znをグルーピングして物体を検出する物体検出手段13を備え、物体検出手段13は、検出した物体の手前側に探索領域Rを設定し、探索領域R内での個々の距離zの情報の分布に基づいて、探索領域R内に物体の一部Bが存在すると判断した場合には、元の当該物体までの距離の情報Zと検出した当該物体の一部までの距離の情報Zbとの差分ΔZを算出して当該物体の情報に対応付け、当該物体の情報に差分ΔZが対応付けられている場合には、検出した当該物体までの距離Zから差分ΔZを差し引いた値を新たに当該物体までの距離Znewの情報として算出して出力する。
(もっと読む)
超音波診断システム
【課題】三次元エコーデータにおける断面の位置を分かりやすくする。
【解決手段】記憶装置30には、臓器や胎児などの観察対象の三次元形状を表す参照モデルデータ32が記憶されている。座標整合処理部36は、メモリ18に記憶されたボリュームデータ(三次元エコーデータ)と、参照メモリとを位置合わせするための座標変換を計算する。カーソル生成部38は、断層画像生成部20が生成している断層画像に対応する断面を、その座標変換により変換することで、参照モデルの座標系におけるその断面の位置や向きを求め、求めた位置や向きを持つ断面カーソルを生成する。モデル画像生成部40は、断面カーソルと参照モデルとをレンダリングすることで、モデル画像を生成する。生成されたモデル画像は、画像生成・合成部22により、断層画像と組み合わされ、表示装置24に表示される。
(もっと読む)
姿勢認識方法およびこの方法を用いた3次元視覚センサ
【課題】円形状の面の姿勢を認識するのに必要な3次元座標を得るための処理を高速化し、かつ3次元座標の計測誤差が小さくなるようにする。
【解決手段】円形物を対象にしたステレオ撮像により生成された各画像を処理して、円の輪郭線を表すエッジ画像を生成し、基準画像から生成されたエッジ画像から複数のモデル円弧P1,P4,P5,P8を抽出して、各モデル円弧毎に1点ずつ計測対象点R1,R4,R5,R8に設定する。つぎに、比較画像から生成されたエッジ画像を、基準画像を生成したカメラと同一の光軸方向から撮像を行った場合の画像に変換し、変換処理後のエッジ画像から各モデル円弧P1,P4,P5,P8に対応する円弧を抽出し、各計測対象点R1,R4,R5,R8への対応点を特定する。そして、画像間で対応づけされた計測対象点の3次元座標を算出し、各3次元座標が分布する平面の方程式を特定する。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】3次元画像処理といった、複数の撮像部からそれぞれ生成される画像データを処理することのできる画像処理装置において、特定の画像処理に必要な複数の画像データをそれぞれ生成する複数の撮像部に対する各種設定を容易に行うことのできる画像処理装置を提供することである。また、そのような画像処理装置に向けられた画像処理プログラムを提供する。
【解決手段】接続される複数の撮像部をいくつかのグループに分けた上で、各グループに属する撮像部を一まとまりにして、必要な撮像条件を設定するためのユーザインターフェイスを提供する。
(もっと読む)
画像処理装置及び方法
【課題】前方視及び後方視の高精度なカラー画像を作成することができる画像処理装置及び方法を提供する。
【解決手段】地球観測衛星が観測したカラー画像と地球観測衛星が前方視又は後方視で観測したパンクロマチック画像とを処理する画像処理装置であって、カラー画像をパンクロマチック画像と重ね合わせ可能に幾何変換して疑似カラー画像を作成する疑似ポインティング処理部15と、疑似ポインティング処理部15で作成した疑似カラー画像とパンクロマチック画像とを組み合わせてパンクロマチック画像と同じ解像度のカラー画像を生成するパンシャープン処理部17と、パンシャープン処理部17で生成したパンシャープン画像を地球観測衛星の観測諸元に基づいて回転して観測者の視野に対応する画像とする画像調整処理部18を備える。
(もっと読む)
眼底画像処理装置
【課題】 精度よく詳細な網膜の評価を行う。
【解決手段】 眼底の同一部位に関して光干渉断層計によって時間をおいて取得された第1の眼底断層画像と第2の眼底断層画像とを比較するための眼底画像処理装置において、光干渉断層計によって取得された第1の眼底3次元断層画像と,第1の眼底3次元断層画像に対応付けされた第1の眼底正面画像とを取得する第1画像取得手段と、第1の眼底3次元断層画像の取得から時間をおいて光干渉断層計によって取得された第2の眼底3次元断層画像と,第2の眼底3次元断層画像に対応付けされた第2の眼底正面画像とを取得する第2画像取得手段と、第1の眼底正面画像と第2の眼底正面画像との位置合わせを行い、位置合わせの結果に基づいて,予め取得された第1の眼底3次元断層画像と予め取得された第2の眼底3次元断層画像を対応付ける対応付け手段と、と有することを特徴とする。
(もっと読む)
3次元デジタイザ
【課題】連続性のある実画像に3次元情報を持たせ、仮想空間の任意の視点から実画像に含まれる物体を見ることが可能な画像データを生成する3次元デジタイザを提供する。
【解決手段】撮像手段2はカラー画像を撮像し、距離画像生成手段1は撮像手段2と重複する視野を持ち距離画像を生成する。撮像位置計測手段4は、撮像手段2および距離画像生成手段1による撮像位置と撮像方向とを計測する。座標変換手段3は、距離画像に規定した装置座標を位置計測手段4により計測した撮像位置および撮像方向を用いて実空間に規定されている3次元の実空間座標に変換する。座標変換手段3で得られた物体の実空間座標を用いることにより、仮想空間形成手段5では、物体のモデリングを行い仮想空間を形成する。さらに、外観形成手段6は、仮想空間に配置した物体に撮像手段で撮像した物体の外観をテクスチャとしてマッピングを行う。
(もっと読む)
情報処理装置、情報処理方法およびプログラム
【課題】 対象物体の変形パラメータが未知の場合に、変形条件の違いによって生じる変形を高精度かつ高速に推定する仕組みを提供する。
【解決手段】 原画像を変形する情報処理装置であって、
原画像の変形による特徴領域の移動を前記変形と対応づけて変形規則を取得する取得手段と、
対象画像の特徴領域と対応する原画像の領域との位置情報を拘束条件として、前記変形規則に従って原画像を変形する変形手段と、
を有する。
(もっと読む)
医療用画像処理装置及び医療用画像処理プログラム
【課題】動き解析情報及び画像の画質情報に基づき、複数のボリュームデータからそれぞれ画像を作成するときの画質を向上させること。
【解決手段】本発明の医療用画像処理装置は、前記複数のボリュームデータを生成し、それぞれの画質情報を生成する第1生成部と、前記複数のボリュームデータのそれぞれの動き解析情報を生成する第2生成部と、前記複数のボリュームデータの内の少なくともひとつのボリュームデータについて、当該ボリュームデータのボクセルと、当該ボリュームデータとは異なる他のボリュームデータのボクセルとを動き解析情報により対応付け、前記対応付けしたボクセルの信頼性を、前記画質情報から取得し、前記対応付けしたボクセルのボクセル値を、前記対応付けしたボクセルの信頼性により補正する補正処理部と、前記補正処理部により補正したボクセル値に基づき、前記複数のボリュームデータを可視化した複数の画像を表示するための処理を行う表示処理部と、を備える。
(もっと読む)
画像処理装置
【課題】抽出精度の向上を可能とする画像処理装置の提供。
【解決手段】記憶部10は、スキャン領域に関する時系列のボリュームデータを記憶する。操作部22は、スキャン領域内の抽出対象領域上にユーザからの指示に従って開始点を指定する。時間濃度曲線生成部12は、時系列のボリュームデータに基づいて、開始点に関する第1時間濃度曲線と、スキャン領域内の対象点に関する第2時間濃度曲線と、対象点の近傍に位置し開始点に連結する基準点に関する第3時間濃度曲線とを生成する。判定部14は、第2時間濃度曲線と、第1時間濃度曲線及び第3時間濃度曲線の少なくとも一方とに基づいて、対象点が抽出対象領域に属するか否かを判定する。抽出部16は、対象点が抽出対象領域に属さないと判定された場合、対象点を抽出対象とせず、対象点が抽出対象領域に属すると判定された場合、対象点を抽出対象とする。
(もっと読む)
超音波診断装置、画像データ生成装置及び画像データ生成用制御プログラム
【課題】デプステクスチャに基づいて単画像ステレオグラムを生成する。
【解決手段】当該被検体の観察部位に対する超音波3次元走査によって収集されたボリュームデータに基づいてレンダリング画像データを生成する際、画像データ生成部6の画質調整部63は、レンダリング画像データ生成部61によるレンダリング画像データの生成過程で得られるZバッファ612の2次元的なデプステクスチャを伝達関数保管部62の各種伝達関数の中から選択された好適な伝達関数に基づいて画質調整することによりデプスマップを生成し、ステレオグラム生成部64は、このデプスマップに基づいて単画像ステレオグラムの生成を行なう。
(もっと読む)
ロボットシステム
【課題】検出精度を低下させることなく、カメラの視界が通い箱に遮蔽されず、またカメラが通い箱に干渉せずにビンピッキングを行うことができるロボットシステムを提供する。
【解決手段】 画像処理装置906は、ワークの2次元モデル109と、2次元ワーク位置検出部108と、通い箱を複数のエリアに分割し、各エリアについてエリア別視線を定義したエリアモデル106と、ピッキング対象ワークが属しているエリアに定義されたエリア別視線を出力するエリア判定部103と、ワークの3次元モデル105と、ピッキング対象ワークを撮像した画像から、3次元位置姿勢を検出する3次元ワーク位置検出部102と、ワークに対して複数の方向からのカメラの視線方向を定義した視線モデル107と、ピッキング対象ワークへアプローチする際のカメラの視線を演算する視線演算部104を備える。
(もっと読む)
361 - 380 / 1,659
[ Back to top ]