
Fターム[5B057CD11]の内容
Fターム[5B057CD11]の下位に属するFターム
ひずみ補正 (948)
Fターム[5B057CD11]に分類される特許
141 - 160 / 319
距離画像処理装置および方法、距離画像再生装置および方法並びにプログラム
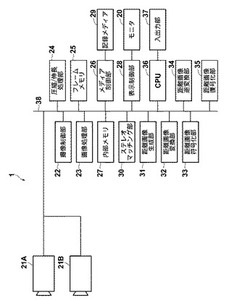
【課題】距離画像の画像ファイルのデータ量を効率よく低減できるようにする。
【解決手段】撮像部21A,21Bが、被写体を撮像することにより、被写体の3次元形状を表す奥行き情報および位置情報を含む距離値を算出するための基準画像および参照画像を取得する。距離画像生成部31が、基準画像および参照画像から距離値を算出する。距離画像変換部32が、所定範囲にある奥行き情報について、所定範囲外にある奥行き情報よりも大きい量子化数により量子化し、距離画像符号化部33が量子化された位置情報を含む距離値を各画素の画素値とする距離画像を符号化し、圧縮/伸長処理部24が符号化された距離画像の画像ファイルを生成する。
(もっと読む)
画像処理装置および画像処理方法

【課題】変形対象の領域が重複した場合の変形処理結果をより好ましいものとする技術を提供する。
【解決手段】
画像処理装置は、対象画像TIを解析して対象画像TI上に複数の変形領域TA1,TA2を設定する変形領域設定部と、変形領域TA1,TA2内の画像の変形を行う変形処理部と、を備えている。変形処理部は、複数の変形領域TA1,TA2が重複した場合に、複数の変形領域TA1,TA2の重複部分を含み、複数の変形領域TA1,TA2のそれぞれの一部の部分領域の変形量を低減する。
(もっと読む)
車載システム
【課題】任意の路面標示を適正に検出する「車載システム」を提供する。
【解決手段】画像補正部2は、カメラ1がフレーム周期で逐次撮影した各画像に歪み補正や視点変換を施して、車両100の後方直後の路面領域を上方の視点から観察した場合に得られる画像を補正画像220として生成する。画像合成部3は、画像補正部2によって以上のようにしてフレーム周期で逐次生成される補正画像220から、同じ垂直方向座標範囲内の画像部分を抽出して合成し、車両100が走行してきた路面全体を上方の視点から観察した場合に得られる画像を路面画像300として生成する。路面標示画像抽出部4は、画像合成部3が生成した路面画像300から、路面標示が写り込んでいる部分を路面標示画像430として抽出する。
(もっと読む)
画像処理装置および画像処理方法
【課題】ドキュメント画像データの読みやすさを向上することができる画像処理装置および画像処理方法を提供すること。
【解決手段】ドキュメント画像データを輝度画像データに変換し(ST2)、輝度画像データからブロック画像データを生成し(ST3)、隣接ブロック画素データの輝度値の変化率に基づいて始点ブロック画素データと終点ブロック画素データとを設定し、始点輝度値と終点輝度値とに基づいて、始点ブロック画素データと終点ブロック画素データとの間のブロック画素データIの輝度値Lを補正し(ST4)、隣接ブロック画素データ群の各輝度値の平均値未満の輝度値であるブロック画素データの輝度値を平均値に置換し(ST5,6,7)、ブロック画素データの輝度値に基づいて、各画素データの輝度値を設定し(ST8)、各画素データからなる処理後輝度画像データをドキュメント画像データに再変換する(ST11)。
(もっと読む)
情報処理装置および情報処理方法
【課題】紙文書の秘匿性を向上させるために、単純にマスキング領域を黒く塗りつぶさないで、マスキング幅を制御することが可能な情報処理装置を提供する。
【解決手段】マスキング対象を特定するマスキング情報を取得するマスキング情報取得手段と、前記取得したマスキング情報に基づいてマスキング対象の長さと独立してマスキング幅を決定するマスキング幅決定手段と、前記決定結果に基づいてマスキング対象をマスキングするマスキング手段とを備える。
(もっと読む)
画像処理装置、画像評価方法、プログラム及び情報記憶媒体
【課題】互いに連続する線が表されている複数の画像を合成して合成画像を生成する際に、より滑らかに、互いに連続する線をつなげられる画像処理装置を提供する。
【解決手段】接続点組合せ決定部32は、撮影画像取得部30が取得した、第1の撮影画像内の第1の接続点と第2の撮影画像内の第2の接続点との組合せを決定する。合成画像生成部34は、第1の撮影画像と第2の撮影画像との少なくとも一方を仮変換して仮の合成画像を生成する。線配置取得部36は、仮の合成画像における第1の線、及び、第2の線の配置を取得する。線連続性評価部38は、第1の線、及び、第2の線の配置に従って、仮の合成画像における第1の線及び第2の線の連続性を評価する。画像出力判断部40は、線連続性評価部38における評価結果に従って、仮の合成画像を画像出力部42に出力させるか否かを判断する。
(もっと読む)
撮像装置
【課題】 魚眼カメラの撮像素子で検知された受像画像の一部を拡大し、歪みが少ない状態で表示画面に表示できるようにした撮像装置を提供する。
【解決手段】 魚眼カメラ11で撮像した受像画像20の一部の区画30aの画像を拡大し、しかも区画30a内の各箇所によって拡大率を相違させた状態で、表示画面に表示させる。その画像処理では、画角の拡大率を場所により相違させた変化関数を使用し、さらに中心射影に変換して表示画面を生成する。変化関数を使用することにより、視認性に優れた表示画像を生成することができる。
(もっと読む)
顔の画像の向きの推定
【課題】対象画像における顔の画像の向きを推定することを可能とする。
【解決手段】画像処理装置は、対象画像における顔の器官の画像を含む領域を器官領域として検出する器官領域検出部と、検出された器官領域に基づき対象画像における顔の画像の向きを推定する顔向き推定部とを備える。
(もっと読む)
撮像装置
【課題】 魚眼カメラの撮像素子で検知された受像画像の一部を拡大し、歪みが少ない状態で表示画面に表示できるようにした撮像装置を提供するものであり、さらに魚眼カメラが傾いて取り付けられたときにその補正を行うことができるようにする。
【解決手段】 魚眼カメラ11で撮像した受像画像20の一部の区画30aの画像を拡大し、しかも区画30a内の各箇所によって拡大率を相違させた状態で、表示画面に表示させる。その画像処理では、画角の拡大率を場所により相違させた変化関数を使用し、さらに中心射影に変換して表示画面を生成し、像点の天頂角と方位角を求める。この方位角に角度補正値を加算して表示画像を生成することにより、魚眼カメラ11の取付け角度誤差の補正ができる。
(もっと読む)
顔領域の設定
【課題】顔の画像との間のずれの発生が抑制された精度の高い顔領域を設定することを可能とする。
【解決手段】画像処理装置は、対象画像における顔の器官の画像を含む領域を器官領域として検出する器官領域検出部と、検出された器官領域に基づき対象画像における顔の画像を含む顔領域を設定する顔領域設定部とを備え、器官領域との間の所定の関係に基づき前記顔領域の傾きと大きさと位置との少なくとも1つを特定し、前記特定された傾きと大きさと位置との少なくとも1つを有する領域を、前記顔領域として設定する。
(もっと読む)
縦列駐車支援装置及び縦列駐車支援方法
【課題】自車両が目的とする駐車位置に到達可能であるかを容易に判断できるようにする。
【解決手段】最終駐車位置設定部64が、俯瞰画像において自車両の駐車位置を設定し、途中目標位置設定部65が、駐車位置への到達経路上に途中目標位置を複数設定する。駐車動作可能領域設定部66が、途中目標位置の各々について途中目標位置に到達可能な俯瞰画像内の所定範囲を駐車動作可能領域として設定し、駐車動作可能領域選択部68が、途中目標位置の各々に設定された駐車動作可能領域の中から自車両を内包する駐車動作可能領域を自車両の現在位置に基づいて選択する。画像データ生成部69は、選択した駐車動作可能領域が設定された途中目標位置と駐車位置とをモニタ50に表示した撮像画像に重畳表示させる画像データを生成し、自車両が到達可能な途中目標位置にある場合に駐車位置と共に撮像画像に重畳表示するようにした。
(もっと読む)
ステレオ画像処理装置及び同画像処理用プログラム
【課題】異物を検知するためのステレオ画像処理装置を提供する。
【解決手段】設定段階では、床面に引いた基準線を撮像した左右画像のうち、左画像の基準線を右画像の基準線に一致させるために必要なシフト量を取得し、前記シフト量に従って前記一方の画像をシフト処理すると共に前記シフト処理した左画像と右画像の差分画像(背景画像)を形成する。また、取得したシフト量を記憶手段に記録する。運用段階では、監視領域の左画像を前記記憶手段に記録したシフト量に応じてシフト処理し、前記シフト処理した左画像と同領域の右画像との差分画像と前記背景画像の差分画像から異物画像を抽出する。
(もっと読む)
車長計測装置および車種判定装置
【課題】正確に車両の長さを算出する車長計測装置、およびそれを利用した車種判定装置を提供する。
【解決手段】車種判定装置10は、画像から車両を検出する車両検出手段21と、画像から車両の影領域52および54のうち車両の真下にある影領域52を分離して抽出する車両影抽出手段22,23と、車両の真下にある影領域52の長さに基づいて車両の長さを算出する車長算出手段25と、車両の長さから車種を判定する車種判定手段26と、を備える。
(もっと読む)
画像処理装置及び画像処理方法
【課題】幾何変換を行う画像処理において、滑らかな補間を高速な計算により行う。
【解決手段】画像処理装置109は、第1の射影方式で取得された原画像に対して格子点座標の座標変換処理及び画素値の補間処理を行って第2の射影方式による変換画像を生成する。そして、該装置は、原画像の格子点座標に対して、第1及び第2の射影方式間の幾何変換関係に基づいた座標変換を行う座標変換手段1095と、座標変換手段による変換後の格子点座標に基づいて、補間手法を切り換えて補間処理を行う補間手段1091,1092とを有する。
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラム
【課題】画像変形処理の際に、多くのリソースを消費していた。
【解決手段】画像の変形を実行可能な画像処理装置であって、対象画像上の特定画像を含む領域を変形処理の対象の候補領域として設定する候補領域設定部と、上記設定された候補領域を対象として、所定の除外条件に従って変形処理の対象から除外する領域を判別する除外判別部と、上記除外判別部によって除外する領域と判別された候補領域以外の候補領域を対象として、領域内の画像の変形を行う変形処理部とを備える構成とした。
(もっと読む)
運転支援システム及び連結車両
【課題】低コストで、トレーラの予想移動軌跡を表示する。
【解決手段】トラクタとトレーラから成る連結車両のトレーラ側にカメラを設置する。カメラは、トレーラの後方を撮影する。運転支援システムは、各撮影画像を路面に平行な鳥瞰図座標上に投影することによって各撮影画像を鳥瞰図画像に変換する一方で、複数の撮影画像から成る動画像のオプティカルフローを鳥瞰図座標上で導出する。このオプティカルフローとトラクタの移動情報からトラクタとトレーラの連結角を推定し、更に、連結角とトラクタの移動情報からトレーラの移動予想軌跡を導出する。そして、この移動予想軌跡を鳥瞰図画像に重畳した画像を表示装置に出力する。
(もっと読む)
画像処理装置および画像処理方法
【課題】精度の高い顔領域の設定を可能とする。
【解決手段】画像処理装置は、対象画像における顔の画像を含む第1の顔領域を設定し、第1の顔領域内の画素の画素値に基づき肌色値の範囲を設定し、第1の顔領域の周辺の画素を含む領域において肌色値の範囲に含まれる画素値を有する肌色画素を検出する。画像処理装置は、また、肌色画素の検出結果に基づき、対象画像における顔の画像を含む領域であって検出された肌色画素の少なくとも一部を含む領域である第2の顔領域を設定する。
(もっと読む)
映像の色収差の補正方法および装置
【課題】 撮像素子用映像処理装置またはディスプレイ映像処理装置などで使用される映像の色収差の補正方法および装置に関するものである。
【解決手段】 本発明の一実施形態による色収差の補正装置は、入力映像の輝度信号を分析して色収差が発生した領域を感知する色収差領域感知部と、前記入力映像を成す色相成分間の勾配の差異から色収差の程度を表す第1加重値を計算する色相勾配計算部と、前記入力映像を成す輝度成分の勾配から色収差の程度を表す第2加重値を計算する輝度勾配計算部と、前記第1加重値と前記第2加重値を乗じた値に基づいて前記感知された領域に含まれる前記入力映像の画素の彩度を補正する彩度補正部を含む。
(もっと読む)
画像処理装置および画像処理方法
【課題】好ましい結果が得られる画像変形を可能とする。
【解決手段】画像処理装置は、撮像によって生成された対象画像における特定種類の被写体の幅方向および奥行き方向のサイズを設定するサイズ設定部を備える。画像処理装置は、また、対象画像における特定種類の被写体の画像を含む領域内の画像を、設定されたサイズに応じた変形の度合いで変形する変形処理部を備える。
(もっと読む)
ブルズアイマップ作成装置、ブルズアイマップ作成方法、及び画像処理装置
【課題】特異に傾いている心臓を撮像する場合や特殊な撮像体位の被検体を撮像する場合であっても、当該ブルズアイマップにおける各領域と心筋との対応関係がずれないブルズアイマップを作成する為の処理を行うことが可能なブルズアイマップ作成装置、ブルズアイマップ作成方法、及び画像処理装置を提供すること。
【解決手段】少なくとも心臓を含む領域の三次元ボリュームデータにおける冠動脈の芯線を抽出する三次元血管芯線抽出・保存部4と、前記芯線の位置及び当該心臓の傾き角度に基づいて補正回転量を算出する補正回転量算出部10と、前記補正回転量算出部10により算出された角度だけ回転処理させたブルズアイマップを作成するブルズアイマップ作成・保存部12と、を具備するブルズアイマップ作成装置。
(もっと読む)
141 - 160 / 319
[ Back to top ]