
Fターム[5B057CD11]の内容
Fターム[5B057CD11]の下位に属するFターム
ひずみ補正 (948)
Fターム[5B057CD11]に分類される特許
61 - 80 / 319
画像変換装置及び操作支援システム
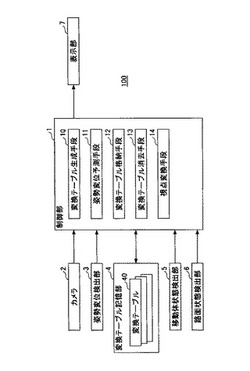
【課題】視点変換処理のリアルタイム性と装置の省リソース性とを両立させる画像変換装置を提供すること。
【解決手段】カメラ(2)が取得する原画像から視点変換画像を生成する画像変換装置(100)は、カメラ(2)の姿勢の変位を検出する姿勢変位検出部(3)と、原画像上の座標と視点変換画像上の座標とを対応付ける変換テーブル(40)を生成する変換テーブル生成手段(10)と、カメラ(2)の現在の姿勢に対する変位が所定条件を満たす姿勢のそれぞれに対応する変換テーブルを変換テーブル記憶部(4)に格納する変換テーブル格納手段(12)と、その所定条件を満たさない姿勢のそれぞれに対応する変換テーブルを変換テーブル記憶部(4)から消去する変換テーブル消去手段(13)と、カメラ(2)の姿勢の変位と変換テーブル(40)とを用いて原画像を視点変換する視点変換手段(14)と、を備える。
(もっと読む)
車両周辺監視装置

【課題】複数のカメラの撮影画像を俯瞰画像に変換し、立体物の歪が少ない俯瞰画像を表示することができる車両周囲監視装置を提供する。
【解決手段】本発明の車両周囲監視装置は、俯瞰画像生成部31が、複数のカメラ21により撮影された車両周囲の画像を俯瞰画像に変換し、合成領域選択部34は、状態情報取得部33からの自車両の位置や周辺環境情報に基づいて、俯瞰画像の合成に利用する領域を選択する。俯瞰画像合成部35は、合成領域選択部34の出力に基づいて、俯瞰画像を合成し、表示部40が俯瞰画像を表示する。
(もっと読む)
車両周辺監視装置
【課題】俯瞰画像上で全体が表示されていない目標物に対し、俯瞰画像上の境界線を変更し全体を表示できるようにした車両周辺監視装置を提供すること。
【解決手段】複数の撮像装置が互いに共通する視野領域とする俯瞰画像の共通領域に位置する障害物と判定された画像から抽出された複数の特徴点に対し、三次元計測処理部43において得られた相対運動情報による一定の経過時間を想定したときの予想軌跡と時刻変化をもとに、前記共通領域を互いに共通する視野領域とする各カメラについて“前記特徴点が写る/写らない”を予測しその予測結果を得る。そして、前記予測結果から、前記俯瞰画像の共通領域について、前記特徴点が抽出された障害物131をより広範囲に写すことの可能なカメラによる部分俯瞰画像を優先させ、フィードフォワード的に俯瞰画像の繋ぎ目、境界線を変更し、障害物131がより広範囲に俯瞰画像に表示されるようにする。
(もっと読む)
交通状況のビデオデータと間隔データを組み合わせて視覚的に表示するための方法および装置
本発明は、車両が存在する交通状況のビデオデータと間隔データとを組み合わせて視覚的に表示する方法に関する。この方法は、車両の周辺部分のカメラピクチャーデータを撮影するステップと、前記車両と前記周辺部分内の少なくとも1つの対象物との間の少なくとも1つの間隔をあらわす距離データを検出するステップとを含む。この方法では、前記カメラピクチャーデータの少なくとも1つの画像部分を、前記少なくとも1つの間隔に依存して歪める。次に、歪んだ少なくとも1つの画像部分を表示する。本発明はさらに、本発明のこの方法を実施する装置を含む。  (もっと読む)
(もっと読む)
運動情報を用いた医用画像解析のためのコンピュータ可読媒体、システム、および方法
1つまたは複数の医用ボリューム・データを比較することで生成された運動情報を、様々な用途に利用することができる。本明細書で説明する用途の例には、1)受信した2つの事例のボリューム・データ間のどこかの時点において、補間済みボリューム・データを生成することと、2)運動情報に基づいてある事例のボリューム・データから別の事例のボリューム・データにジオメトリ情報を伝搬することと、3)一連のレンダリング処理した事例のボリューム・データ内の同じ位置に1つまたは複数の特徴部を固定するようにボリューム・データを調節することが含まれる。これらの作用の組み合わせを実装することもできる。 (もっと読む)
画像処理システム、画像処理方法及び画像処理プログラム
【課題】背景画像に対して顔画像を挿入した合成画像を提供するための画像処理システム、画像処理方法及び画像処理プログラムを提供する。
【解決手段】画像処理サーバ20の制御部21は、背景画像の特定処理、ユーザ画像の取得処理を実行する。そして、制御部21は、ユーザ画像において顔画像認識処理を実行する。更に、制御部21は、顔画像上の評価用楕円を生成する。この評価用楕円上の画素値のヒストグラムを算出し、このヒストグラムの分散値を用いて顔要素を抽出する。次に、制御部21は、画像変形処理を実行する。ここで、表現指数、挿入領域の大きさや傾きに基づいて、顔要素画像を変形する。そして、制御部21は、画素勾配を最適化するための画像調整を行なうことにより、背景画像と顔要素画像とを合成する。そして、制御部21は、合成画像を利用者に提供する。
(もっと読む)
運動情報を用いて医用画像の質を改善するコンピュータ可読媒体、システム、および方法
1つまたは複数の事例の医用ボリューム・データを比較することによって生成される運動情報を、様々な適用例で使用することができる。本明細書で説明した適用例は、ボリューム・データをフィルタ処理するステップと、運動情報に基づいてボクセルの強度を調節するステップとを含む。運動情報を利用してボリューム・データを圧縮することもできる。これらの作用の組み合わせを実現することもできる。 (もっと読む)
画像処理装置
【課題】顔画像に重なっている遮蔽領域を正確に検出することが困難であった。また、遮蔽領域を正確に検出できないために、各種処理において遮蔽領域の影響を受けた不適切な処理結果が生じていた。
【解決手段】注目画像に含まれる顔の少なくとも一部を含む領域の画像を顔画像として取得する顔画像取得部と、遮蔽領域の検出のための基準画像として用いられる基準顔画像を取得する基準顔画像取得部と、上記顔画像と基準顔画像とを比較することにより、上記顔画像内において、顔を構成する要素以外の要素によって遮蔽された遮蔽領域を検出する遮蔽領域検出部とを備える構成とした。
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラム
【課題】顔毎の形状等の特徴の違いをより正確に捉えた上で変形処理を行なうことが望まれていた。
【解決手段】注目画像に含まれる顔の輪郭に対応する輪郭点を検出する検出部と、上記検出された輪郭点の位置に基づいて、上記顔の少なくとも一部を含む領域を変形処理の対象領域として設定する領域設定部と、上記設定された対象領域内の画像の変形を行う変形処理部とを備える構成とした。また、上記注目画像としての動画を構成するフレーム画像毎に、上記輪郭点の検出と対象領域の設定と画像の変形とを行なう。
(もっと読む)
車両周辺画像生成装置
【課題】車両の周辺を同時に広く見渡すことが可能な車両周辺画像を生成する車両周辺画像生成装置を提供する。
【解決手段】車両周辺画像生成装置50は、車両に設けられた複数の撮影カメラ11−13により撮影された車両の周辺画像を取得する画像取得部31と、車両の車室内に設けられ画像を表示する表示装置41と、当該表示装置41に表示される画像の視点となる位置を鉛直上方向からの視点に設定する視点位置設定部32と、周辺画像を用いて視点位置設定部32により設定された位置を視点とする魚眼画像を生成する魚眼画像生成部33と、自車を示す自車イメージを生成する自車イメージ生成部35と、魚眼画像と自車イメージとを用いて表示装置41に表示する画像を生成する表示画像生成部34と、を備え、魚眼画像の視点位置が変更可能である。
(もっと読む)
放射線画像処理装置、放射線画像処理方法及び放射線画像処理プログラム
【課題】大量の固定長フレームメモリを必要とせず、かつ、解像度と定量性を低減させることなく、ガンマカメラで検出した大量のフォトン情報から迅速に二次元画像データを生成し、画像処理を行う装置を提供する。
【解決手段】被検体から放射されるフォトンのXY二次元位置情報を取得し、かつ、前記各フォトンのエネルギー値をZ値として取得する手段と、前記各フォトンの検出条件を検出条件情報として取得する手段と、各前記検出位置情報及びZ値を、対応する前記検出条件情報に基づき検出条件毎に分類する分類手段と、各前記検出位置情報を、前記XY二次元空間よりも小さい画素数の変換位置情報にアドレス変換する変換手段と、前記Z値が、予め定義された有効範囲内である場合には、前記分類手段による分類毎にフォトン出力頻度を数え上げ、前記変換位置情報毎にフォトン出力頻度を計測し、前記分類手段による分類毎に、二次元画像データを生成する。
(もっと読む)
画像生成装置、プリントシール製造方法、プログラム及び記憶媒体
【課題】肌の色の補正とは違った方法で被写体の目の部分に効果的な画像処理を施すこと。
【解決手段】シールプリント機において、カメラを用いてユーザの顔画像が撮影される。そして、撮影された顔画像の中からユーザの目を検出する処理が行われ、検出された目に対して睫毛テクスチャをフィッティングさせるフィッティング処理が行われることで、撮影画像中のユーザの睫毛描画位置が特定される。そして、特定された睫毛描画位置に所定の睫毛画像色が着色されることで、睫毛画像が描画された表示用画像が生成されて、ディスプレイ1002に表示される。
(もっと読む)
画像生成装置及び画像表示システム
【課題】画像生成装置を様々な車種に搭載可能とする。
【解決手段】画像生成装置10aでは、合成画像の生成に用いる車種に応じた複数の車種別データ7が不揮発性メモリ40に記憶されている。そして、不揮発性メモリ40に記憶された車種別データ7とは異なる車種の車種別データ7が記憶されたメモリカード61から当該車種別データ7を取得して、不揮発性メモリ40に追加して記憶させることが可能である。このため、メモリカード61を利用して新たな車種別データ7を追加していくことで、画像生成装置10a及び画像表示システム100aを様々な車種に適切に対応させて搭載することができる。
(もっと読む)
マッピング機能の注入のためのシステムと方法
既存の合成器にコンピュータコードの一部を注入し、マッピング機能を第1のデジタル画像に適用するためにコンピュータコードの一部を使用し、合成器内で適用されたマッピング機能を適用することによって適合された第1のデジタル画像に基づいて第2のデジタル画像を形成することによって、ディスプレイ品質を改善するための方法とシステム。次いで、第2のデジタル画像は1台以上のディスプレイを介して目視者に表示されてよく、各ディスプレイは表示されたデジタル画像の部分を形成する。その結果は、混合イメージまたは立体イメージを作るために用いられてよい。マッピング機能はディスプレイシステムのジオメトリの修正または特性の補正(たとえば色、輝度など)のために適合されてよく、そのような特性は検出器を用いて感知されてよい。コードの一部は表示されたデジタル画像に対するグラフィックスドライバ制御ハードウェア構成に注入されてよい。 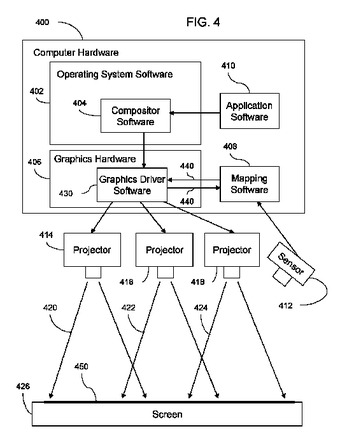 (もっと読む)
(もっと読む)
電子画像のリアルタイムパーソナライゼーション方法及びシステム
【課題】電子画像のパーソナライゼーションをリアルタイムで行う。
【解決手段】システム10は、メモリ16に記憶されたコンピュータが実行可能な命令群を実行するプロセッサ14を備える。命令群は、電子画像内のある平面上にあると考えられる四辺形28の各頂点の入力座標を受け取る処理、データベースから1以上の可変テキスト文字列32を読み出す処理、各可変テキスト文字列を矩形のテキストボックスに合わせるようにアフィン変換30を行う処理、矩形のテキストボックスの各頂点を四辺形の各頂点に移動させるよう矩形のテキストボックスに対して非線形投影変換24を行う処理、変換された各可変テキスト文字列を、それぞれ電子画像の各バージョンの上の四辺形内にレンダリングする処理、のための命令群を含む。またシステム10は、四辺形内に可変テキスト文字列が配置された電子画像を印刷するプリンタ22を備える。
(もっと読む)
画像接合方法、装置及びプログラム
【課題】 2つのオルソ画像をより自然に接合する。
【解決手段】
近似度算出プログラム(12a)が、ハードディスク装置(24)に格納される2つのオルソ画像データ(30)の重複部分の探索範囲で近似度を算出する。近似度2値化プログラム(12b)が、探索範囲内の近似度を最大の閾値で2値化し、ラベリング処理プログラム(12c)がラベル化し、細線化プログラム(12d)が細線化する。無指定探索線探索プログラム(12e)又は入口点指定接合線探索プログラム(12f)が、接合線決定基準線に沿った方向で近いラベルを探索しながら、探索したラベル内に接合線を設定する。ジャンプ区間に対しては、近似値の閾値を下げて、2値化、ラベリング処理および細線化を実行し、接合線決定基準線に沿った方向で近いラベルを探索しながら、探索したラベル内に接合線を設定することを繰り返す。
(もっと読む)
画像処理装置、画像処理方法及び表示装置
【課題】撮像画像を実際の景色を見回したような臨場感が得られるような画像とする。
【解決手段】画像処理部9では、抽出座標設定部101において、撮像画像の被写体像に対する視点の変移方向に沿って撮像画像における抽出座標を設定する。また、画像生成部103において、被写体像の直線歪みを補正した撮像画像から、その撮像画像の画角に対応して導き出される人間の視野角相当のサイズの領域を、抽出座標に基づいて順次抽出した複数の部分領域画像を生成する。画像出力部104は、生成した複数の部分領域画像をフレームとする動画像を出力する。
(もっと読む)
モデリング装置、磁気共鳴イメージング装置、モデリング方法、およびプログラム
【課題】フィッティングを高い精度で行うことができるフィッティング装置、および磁気共鳴イメージング装置を提供する。
【解決手段】再構成画像Irの微分画像Idを作成することによって、脳梁CCの輪郭OLを強調した後、微分画像Idに確率アトラスPAを乗算することによって、脳梁CCが抽出された脳梁画像Iccを作成する。その後、アフィン変換によって、輪郭モデルM1を脳梁CCの前端部Fの輪郭OFに位置合わせするとともに、輪郭モデルM2を脳梁CCの尾端部Tの輪郭OTに位置合わせし、アフィン変換された輪郭モデルM1およびM2を変形する。
(もっと読む)
操縦支援装置
【構成】カメラC_1〜C_4は、路面を移動する車両に設けられて、路面を斜め上から捉える。CPU12pは、カメラC_1〜C_4から繰り返し出力される被写界像P_1〜P_4に基づいて、路面に対する全周鳥瞰画像を繰り返し作成する。作成された全集鳥瞰画像は、表示装置16のモニタ画面に再現される。CPU12pは、車両の移動方向に直交する方向の側部に建築物のような立体物が存在するか否かを、上述の要領で作成された全周鳥瞰画像に基づいて判別する。CPU12pはまた、判別処理のために注目される側部に相当する部分画像がモニタ画面に再現される全周鳥瞰画像に占める割合を、判別結果に基づいて調整する。
【効果】操縦支援性能が向上する。
(もっと読む)
障害物の位置を標記した鳥瞰画像で駐車を補助する装置とその使用方法
【課題】超音波音響アラームでの障害物の真の位置の不明や、画像表示手段での障害物と、車両の位置の視認効果の不良などの欠点を是正すること。
【解決手段】影像取得ユニット、超音波探知ユニット、アラーム・ユニット、表示ユニット、及び処理ユニットを含む駐車補助装置で、車両後退の際、後方の影像画面を影像取得ユニットで取得し、障害物と車両間の距離を超音波探知ユニットで探知し、障害物のマークを標記した車両後方画面の鳥瞰画像を表示ユニットで表示してドライバーに提供する。
(もっと読む)
61 - 80 / 319
[ Back to top ]