
Fターム[5B057DA15]の内容
Fターム[5B057DA15]に分類される特許
21 - 40 / 897
マシンビジョン検査システムおよびその位置測定結果の決定方法
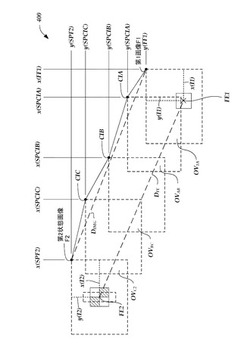
【課題】複数の視野に分割された対象を高精度に測定することができるマシンビジョン検査システムおよびその位置測定結果の決定方法を提供する。
【解決手段】マシンビジョン検査システムは、第1動作状態においてスケールベースの測定により第1対象FE1の位置を測定する。第2動作状態では、第1対象から第2対象に至る途中で重複画像CIA〜CICを撮影し、画像相関を利用して重複画像CIA〜CICの相互の画像変位を測定し、第1対象の位置と画像変位のセットとを合わせて第2対象FE2の位置を測定する。
(もっと読む)
正しい機器使用姿勢誘導装置及び方法

【課題】 ユーザが正しい姿勢を保持するように補助する装置及び方法を提供する。
【解決手段】 正しい機器使用姿勢誘導装置は、携帯端末で撮影されたユーザの顔映像、携帯端末の傾斜角度またはその組み合わせのうちの少なくとも1つを用いて、ユーザが、携帯端末を正しい姿勢で使っているか否かを判断する判断部と、判断部の判断の結果によって、ユーザが、携帯端末を正しい姿勢で使っていない場合、所定の警報を発する警報実行部と、を含む。
(もっと読む)
車両の運転支援装置
【課題】自車両の進行方向と交差する方向で該自車両の前方に向って走行して来る他車を、該他車と自車両との間に存在する遮蔽構造物により検出することができない場合であっても、該他車と自車両との接触を回避するための処理を極力適切なタイミングで行う。
【解決手段】車両2に搭載したカメラ3aの撮像画像から、車両2の進行方向と交差する方向で車両2の前方に向かって移動しており、且つ、障害物検出手段7により検出されていない他車21の前照灯により照明されていると推定される他車照明路面領域を検出する他車照明検出手段8を備える。他車21が検出された場合に、他車21との接触を回避するための対策処理を実行すべきか否かを判断する処理を、他車21が検出される前に、他車照明路面領域が検出された場合と、他車21が検出される前に、他車照明路面領域が検出されていない場合とで異なる判断条件を使用して行なう。
(もっと読む)
並列処理システム及び車両走行システム
【解決課題】動画を高速処理して必要情報を抽出する並列処理システム、及び並列処理システムを用いてリアルタイムな動画情報を基に車両の安全走行を行う車両走行システムの提供。
【解決手段】並列処理システム1は、大量のデータをn個のデータ集合体に区分する信号変換部30、信号変換部30からのn個のデータ集合体を処理するデータ処理部50、信号変換部30及びデータ処理部50が連結されているルータ40を具備する。データ処理部50は、区分されたn個のデータ集合体が割り当てられ、割り当てられたデータ集合体を同時並行処理して、所定の処理データを出力するn個のプロセッサ51、ルータ40を介して、n個のプロセッサのそれぞれから出力されるn個の処理データを受け入れ、n個の当該処理データを統合して全体処理を行って所望の加工データを出力する1個のマスタプロセッサ52を含む。
(もっと読む)
赤外線センサを用いた運転者状態監視装置及びその方法
【課題】赤外線LED及びカメラを用いて運転者状態を確認することにより、カメラ又は運転姿勢に従い発生することのある認識誤謬を低減できる運転者状態監視装置を提供する。
【解決手段】光信号を発光する発光部101及び前記光信号を受光する受光部103を含み、発光部101から発光される光信号と、受光部103により受光される光信号の位相差を用いて、正面の運転者までの距離を測定する赤外線センサ100、運転者の顔を撮影し、撮影された映像で運転者の顔を検出する顔認識カメラ110、及び赤外線センサ100及び顔認識カメラ110を介して測定されたデータを用いて認識誤謬が発生したのかの可否を判別し、認識誤謬が発生した場合、発生した認識誤謬を分析する電子制御部120を含み、運転者が正常状態か、不注意、眠気などの不注意状態かを確認する。
(もっと読む)
車両運転支援装置、道路の路肩を検出する方法および該方法に基づく車両運転支援方法
【課題】本発明は、実際の道路環境において、反射光(楕円偏光)の楕円軸が車両の車軸方向あるいは高さ方向に対して傾いている場合であっても、正確に路肩を検出することができる新規な車両運転支援装置を提供することを目的とする。
【解決手段】偏光撮像手段の画素毎に直交する2つの偏光方向をもつ偏光素子を設け、該偏光素子の偏光検出軸を所定の角度範囲で変更させながら、2つの偏光方向に対応する光強度の比を監視し、当該光強度比が最初の極値に達したときの光強度に基づいて偏光状態特徴量を算出する。この偏光状態特徴量が所定の閾値を超える領域を路肩として検出し、その位置情報に基づいて、操舵制御手段、走行速度制御手段、警告手段等を制御することによって車両の運転支援を行う。
(もっと読む)
監視装置、監視方法及び監視プログラム
【課題】高精度に不審対象を検出することができる監視装置を提供する。
【解決手段】対象検出部21は、撮像部1により撮像された動画像から監視する対象を検出する。動線情報作成部22は、対象検出部21により検出された対象の移動ベクトルから動線情報を作成する。不審行動判定部24は、動線情報から、予め設定された不審行動パターン31に応じて、対象検出部21により検出された対象を不審対象と判定し、それ以外の対象を新たな不審対象候補として設定する。複合行動判定部26は、新たな不審対象候補の動線情報と、新たな不審対象候補の周辺に存在する周辺対象の動線情報とから、予め設定された条件である複合行動パターン32に基づいて、新たな不審対象候補が不審対象か否かを判定する。
(もっと読む)
車両運転支援装置、車両が走行する道路の路肩を検出する方法および該方法に基づく車両運転支援方法
【課題】本発明は、楕円偏光が優勢な実際の道路環境においても正確に路肩を検出することができる新規な車両運転支援装置を提供することを目的とする。
【解決手段】車両の車軸方向(または車両の高さ方向)に2つの偏光カメラを配置して偏光画像撮像系を構築した上で、車軸方向の偏光成分の光強度(H)および当該車両の高さ方向の偏光成分の光強度(V)から算出される偏光状態特徴量を、画像において対をなす画素毎に比較し、その差分が所定の閾値を超える場合に、これを路肩として検出する。検出された路肩の位置情報に基づいて、操舵制御手段、走行速度制御手段および警告手段等を制御することによって車両の運転支援を行う。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】監視カメラに対する妨害行為を検出できるようにする。
【解決手段】画像の画像データを取得し、取得された画像をN(N>1)個のブロックに分割し、新たな画像の画像データが取得される毎に、N個のブロックのうちのM(N≧M>1)個のブロックを、更新対象のブロックとして順次指定し、指定されたM個のブロックの画像データに所定のフィルタによるフィルタリングを施し、フィルタリング結果が、所定の値より大きい画素をカウントし、カウントされた画素の数と所定の値を比較することで、ブロックに異常があるか否かを判定し、異常があると判定された画像内のブロック数と所定の値を比較することで、妨害が発生したか否かが判定される。本技術は、例えば、監視システムに適用できる。
(もっと読む)
画像処理装置、画像処理システム、カメラ及びカメラシステム
【課題】対象物を効率良く検出することができる画像処理装置、画像処理システム、カメラ及びカメラシステム等を提供すること。
【解決手段】画像処理装置100は、赤外線画像データを取得する画像取得部110と、画像取得部110により取得された赤外線画像データに基づく画像領域に対して、画像領域を複数の領域に分割する境界線を設定し、境界線によって分割された複数の領域のうちの少なくとも1つの領域を画素密度変更領域ARMDに設定する領域設定部120と、画素密度変更領域ARMDの赤外線画像データの画素密度を低減する処理を行い、画素密度変更領域ARMDを含む画像領域の赤外線画像データに基づいて対象物の検出処理を行い、検出処理の結果に基づいて表示用画像データを生成する処理部とを含む。
(もっと読む)
停止線検出システム、停止線検出装置、停止線検出方法及びコンピュータプログラム
【課題】路面に形成された停止線を適切に検出することを可能にした停止線検出システム、停止線検出装置、停止線検出方法及びコンピュータプログラムを提供する。
【解決手段】停止線を認識対象とした高精度ロケーションシステムを用いて、停止線の候補となる地物(停止線候補)を検出した場合に、進行方向別通行区分の路面標示よりも進行方向側に停止線候補の路面標示を検出し、且つ最も分岐点側にある進行方向別通行区分の路面標示から車両の進行方向の所定距離以内に停止線候補の路面標示を検出した場合に、該停止線候補を停止線と特定するように構成する。
(もっと読む)
居眠り監視警告装置及び居眠り監視警告方法
【課題】 自動車など各種移動体の運転手が運転中に居眠りをしてしまうと、重大な事故を引き起こす可能性がある。本発明は交通機関の運転手の居眠りを監視する装置に関するもので、運転手の顔画像のうち眼の開閉具合に基づいて覚醒度を監視し居眠り状態にあると判断した時に警告音を発生させる装置に関する。安価で手軽で持ち運び自由な居眠り監視警告装置を実現することで、運転手は複数の異なる車両のすべてにおいて居眠り監視を利用できるようにする。
【解決手段】 画像を撮影するカメラモジュールをメガネのつるに装着し、画像を眼の正面ではなく横方向から近接撮影して眼の開閉度合いを判断するようにした。
(もっと読む)
接近障害物検出装置及びプログラム
【課題】光源が自車両に接近することを検出して警告する接近障害物検出装置を提供する。
【解決手段】路面反射した光が、光源を起点として、撮影カメラの方向に延びる縦長の楕円形に類する形状を有することに着目して、路面湿潤時に自車両周辺を撮影した画像より、高輝度領域追跡部25が特定の形状からなる高輝度領域の位置及び動きの時間的な変化を検出する。そして、光源接近判定部29は、撮影画像において縦長楕円形で現れる路面反射部分の時間的な移動方向をもとに、自車両に接近してくる光源(自車方向に接近する障害物)を検出する。
(もっと読む)
車両用外界認識装置及びそれを用いた車両制御システム
【課題】例えば薄暮のように昼間と照明条件が異なるシーンにおいて先行車両を正しく検出することができる車両用外界認識装置を提供する。
【解決手段】車両外形を検出するとともに、車両尾灯を検出し、車両外形と車両尾灯が同期して動いているものを車両と判定する。
(もっと読む)
車両周辺監視装置
【課題】カメラとレーダ装置の組み合わせにより物体の実空間位置を算出するときに、車両と物体間の距離の誤検出により、不適切な実空間位置の算出がなされることを防止した車両周辺監視装置を提供する。
【解決手段】物体距離検出部21によりレーダ装置12の測距データから検出された物体をカメラの撮像画像に投影して、該物体の画像部分を検出する画像部分検出部22と、物体距離検出部21による検出距離に基づいて、物体の実空間位置を算出する実空間位置算出部23と、前記検出範囲内に存在する格子フェンスを検出する半透過物体検出部25と、カメラ11の撮像方向で、格子フェンスと重なる位置に存在する物体については、実空間位置算出部23による実空間位置の算出を禁止する実空間位置信頼性判定部24とを備える。
(もっと読む)
走行場面認識モデル生成装置、運転支援装置、及びプログラム
【課題】予め認識したい物体が特定されていない場合においても、運転に必要な情報を残したまま、走行場面を圧縮する。
【解決手段】視線先画像抽出部34で、ドライバの視線方向に基づいて視線先画像を抽出し、特徴量A抽出部36で、視線先画像から特徴量リストAを生成し、特徴量B抽出部38で、外観環境画像全体から特徴量リストBを生成し、特徴量DB40に蓄積する。クラスタDB構築部42で、特徴量リストAをクラスタリングし、各クラスタの代表ベクトルをクラスタDB44に格納する。クラスタ別重みDB構築部46で、各クラスタにおける特徴量リストAの出現確率と特徴量リストBの出現確率との比に基づいて、クラスタ毎の重みを算出し、クラスタ別重みDB48に格納する。場面認識部52で、クラスタ毎の重みが閾値以上のクラスタに対する特徴量リストCのクラスタ別の出現頻度ヒストグラムを算出し、走行場面として認識する。
(もっと読む)
車両用画像認識装置
【課題】本発明は、車両用画像認識装置に係り、自車両の発進時に自車両の移動を伴うことなく単一のカメラを用いて自車両周辺の状態を判定することにある。
【解決手段】自車両周辺を撮影するカメラと、自車両停車時における自車両周辺の停車時状態(具体的には、自車両停車時におけるカメラの撮像画像、及び、自車両停車時にカメラが撮影する方向に存在する障害物の有無及び位置)を示す情報を記憶手段に記憶させる停車時記憶制御手段と、自車両発進時、カメラの撮像画像と記憶手段に情報記憶されている停車時状態とに基づいて、自車両周辺の状態を判定する状態判定手段と、を設ける。
(もっと読む)
車両周辺監視装置
【課題】障害物が検出された検出領域について走査を省略することで処理負荷を削減することを目的とする。
【解決手段】車両周辺監視装置は、カメラの映像信号を入力する映像入力手段11と、入力画像についてパターンマッチング処理によって障害物を検出する走査を行う障害物検出手段12と、障害物検出手段12の走査方法を制御する走査制御手段13とを備え、走査制御手段13は、障害物検出手段12が障害物を検出した場合にその検出領域について走査を省略することを特徴とする。
(もっと読む)
測距装置
【課題】ステレオカメラの撮像画像の視差から対象物までの距離分布を求め、先行車の検知に使用される測距装置において、距離分布演算の計算時間を短縮し安全性を向上する。
【解決手段】測距装置21は、低速高精度な第1の距離分布演算部3と、高速低精度な第2の距離分布演算部22と、追突回避距離計算部24とを備え、車速センサ12からの車速情報は追突回避距離算出部24に入力され、この追突回避距離算出部24において車速に対応した追突回避距離が求められ、設定部23は、第2の距離分布演算部22の3D計測部22bで求められた距離分布の内、前記追突回避距離から±αの距離に該当する部分を、第1の距離分布演算部3の処理領域に設定する。
(もっと読む)
標識認識装置及び標識認識方法
【課題】 標識認識を効率よく行うことのできる標識認識装置を提供する。
【解決手段】 車両に搭載されて標識を認識する標識認識装置1は、車両の前方を撮影して画像を取得するカメラ10と、カメラ10にて得られた画像内の標識存在認識エリアEAにおいて、標識存在認識(第1の認識レベルでの標識認識)を行う標識存在認識部31と、カメラ10にて得られた画像内の標識存在認識エリアEAとは異なる標識内容認識エリアCAにおいて、標識内容認識(第1の認識レベルより高い第2の認識レベルでの標識認識)を行う標識内容認識部33を備える。これにより、複数の認識エリアEA,CAについて、それぞれ異なる認識レベルで標識を認識するので、画像内で高い認識レベルが必要とされない部分の認識レベルを落とすことで、全体として標識認識の効率を向上できる。
(もっと読む)
21 - 40 / 897
[ Back to top ]