
Fターム[5B057DB03]の内容
画像処理 (340,757) | 分析部 分析画像の特性 (30,351) | 三次元 (1,504)
Fターム[5B057DB03]に分類される特許
101 - 120 / 1,504
位置検知システム、それを用いた移動体、位置検知方法およびそのためのプログラム
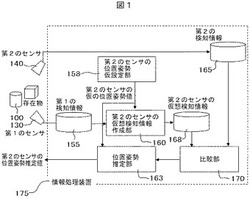
【課題】センサの計測範囲に特徴的な被写体が存在していない場合や、そのセンサが他のセンサの計測範囲外にあるときにも、その位置姿勢の算出を可能にする。
【解決手段】第1のセンサは、環境内の存在物の位置情報および色情報を第1の検知情報として得るものであり、第2のセンサは、存在物の色情報を第2の検知情報として得るものであり、情報処理装置は、第2のセンサの位置姿勢を仮に設定する位置姿勢仮設定部と、位置姿勢仮設定部により仮に設定された第2のセンサの位置姿勢から存在物を検知したときに得られる検知情報を、仮想検知情報として、第1の検知情報を用いて仮想的に作成する仮想検知情報作成部と、仮想検知情報作成部で作成された仮想検知情報と第2のセンサで得られた第2の検知情報を比較する比較部と、比較部の比較結果と仮に設定された第2のセンサの位置姿勢から、第2のセンサの位置姿勢推定値を出力する位置姿勢推定部を備える。
(もっと読む)
画像処理装置及び方法

【課題】 任意の角度から見た自身の姿を確認することができるようにする。
【解決手段】 表示画像生成部は、被写体の注目部分の変化量に連動させて、異なる視点で被写体が撮影された画像又はそれと等価な画像を、被写体画像として生成する。画像表示制御部は、表示画像生成部により生成された被写体画像を表示画面に表示させる。本技術は、被写体の画像を表示する画像処理装置に適用することができる。
(もっと読む)
環境認識装置および環境認識方法
【課題】夜間や雨等、光源が拡散し易い環境において、壁でないものを壁と誤判断することを抑制する。
【解決手段】環境認識装置130は、検出領域内に存在する対象部位の、自車両に対する相対距離を含む位置情報を取得する位置情報取得部160と、自車両の進行方向に垂直な水平距離の差分および自車両の進行方向に平行な相対距離の差分が第1所定距離内に連なる複数の対象部位をグループ化して対象物とするグループ化部162と、対象物を構成する複数の対象部位が、自車両の進行方向に垂直な面に対して所定角度以上に傾斜する傾斜面を形成すると、壁の候補である壁候補と判断する候補判断部164と、自車両の進行方向に垂直な水平距離の差分および自車両の進行方向に平行な相対距離の差分が、第1所定距離より長い第2所定距離内に連なる複数の壁候補を、壁であると判断する壁判断部166と、を備える。
(もっと読む)
環境認識装置および環境認識方法
【課題】曲線を描いたり、それ自体が傾斜したりする対象物の特定効率および特定精度の向上を図る。
【解決手段】環境認識装置130は、検出領域内を分割した複数のブロック毎の輝度を取得し、ブロック毎の輝度のエッジが伸長する方向に基づくエッジ方向を導出し、エッジ方向に基づいてブロック同士を関連付け、エッジ軌跡を生成し、複数のエッジ軌跡により囲まれる領域をグループ化して対象物とし、対象物を特定物として決定する。
(もっと読む)
環境認識装置および環境認識方法
【課題】対象物の特定精度を向上し、誤認識を回避する。
【解決手段】
環境認識装置130は、対象部位の輝度から、対象部位に対応する特定物を仮決定し(S302)、同一の特定物に対応すると仮決定された隣接する対象部位をグループ化して対象物とし(S304)、対象物からの水平距離の差分および高さの差分が第1所定範囲内にある、対象物と輝度に関して同一の特定物に対応する対象部位を対象物とし(S308)、対象物内の特定領域における全ての対象部位に対する、輝度が所定の輝度範囲に含まれる対象部位の割合が所定閾値以上であれば、その対象物を特定物として決定する(S310)。
(もっと読む)
入力装置
【課題】操作者とノイズとなる背景とを正確に識別して、カメラの撮影範囲内に操作者以外の人が居て手を動かした場合でも誤動作しない入力装置を提供する。
【解決手段】右眼用撮像装置Aと右眼用撮像装置Bと並べて配置し、距離測定手段Cにて両眼視差法によりそれぞれの撮像装置A、Bが撮像した被写体までの距離を測定する。そして、被写体判別手段Dは、測定した距離を両方の撮像装置A、B間の間隔に基づいて両眼視差法により割り出して予め設定してある奥行き距離と比較し、被写体までの距離と奥行き距離とが所定の許容範囲内で一致していると、操作指示生成手段Eはこの被写体の動きを検出し、この検出結果に応じた操作指示を生成する。
(もっと読む)
環境認識装置および環境認識方法
【課題】対象物の特定精度を向上する。
【解決手段】
環境認識装置130は、検出領域内に存在する対象部位の輝度を取得し、データ保持部152に保持された色識別子と輝度範囲との対応付けに基づき、対象部位の輝度に応じて対象部位に色識別子を設定し(S300)、データ保持部に保持された色識別子と輝度範囲との対応付けに基づき、水平距離の差分および高さの差分が所定範囲内にある、同一の特定物に対応する1または複数の色識別子が設定された対象部位をグループ化する(S304)。
(もっと読む)
3D自動色補正装置とその色補正方法と色補正プログラム
【課題】カラーチャート等の参照板を用いなくても、低コストかつ安定して、映像から自動的に色補正パラメータを算出し、左右映像間の色補正を遂行することができる3D映像のための自動色補正装置を提供することを目的とする。
【解決手段】撮影して取得した二つの映像間において色補正を遂行する色補正装置において、取得した二つの映像から画素値の色ヒストグラムを各々算出する色ヒストグラム算出部と、色ヒストグラム算出部が算出した色ヒストグラムから確率密度関数を各々算出する確率密度関数算出部と、確率密度算出部が算出した各々の確率密度関数からロバストM推定による色補正パラメータを算出する色補正パラメータ算出部とを備え、色補正パラメータ算出部が算出した色補正パラメータを、取得した二つの映像の少なくともいずれか一方に適用して色補正する色補正装置とする。
(もっと読む)
環境認識装置および環境認識方法
【課題】雨天時等、光が拡散し易い環境において、対象物の特定精度を向上し、誤認識を回避する。
【解決手段】
環境認識装置130は、検出領域内に存在する対象部位の輝度を取得し、データ保持部152に保持された色識別子と輝度範囲との対応付けに基づき、対象部位の輝度に応じて対象部位に色識別子を設定し(S300)、データ保持部に保持された特定物と色識別子との対応付けに基づき、水平距離の差分および高さの差分が所定範囲内にある、同一の特定物に対応する1または複数の色識別子が設定された対象部位をグループ化して対象物とし(S302)、対象物のうち、光が拡散する環境か否かに応じて選択した色識別子が設定された対象部位で特定される外縁を、対象物の外縁とする(S304)。
(もっと読む)
平面視低電力モバイル装置における立体画像およびビデオのリアルタイム取得および生成
【課題】ステレオ・ビデオのリアルタイム取得および生成のための奥行き情報を検知しかつ推定するために低複雑性アプローチを使用する平面視低電力モバイル装置を提供する。
【解決手段】平面視低電力モバイル装置は、単一の取得視界からリアルタイム立体画像およびビデオを作成することができる。この装置は、単一の取得視界のブロック奥行きマップを作成するためにオートフォーカッシング・プロセスからの統計を使用する。ブロック奥行きマップにおけるアーテイファクトが低減され、また、画像奥行きマップが作成される。立体三次元の(3D)左・右視界が作成されるステレオ、Zバッファに基づく3D表面回復プロセスおよび両眼視覚の幾何学形状の関数である差マップを使用して画像奥行きマップから作成される。
(もっと読む)
三次元点群位置データ処理装置、三次元点群位置データ処理方法、三次元点群位置データ処理システムおよびプログラム
【課題】三次元点群位置データの処理の途中経過を知ることができる技術を提供する。
【解決手段】三次元レーザースキャナが測定した三次元点群位置データ(S502)に基づき、解像度を段階的に変えた三次元モデルを作成する(S505)。この際、低解像度の三次元モデルの作成およびその表示(S506)、さらにその後に、ラベリングされたデータを引き継いで(S509)の高解像度の三次元モデルの作成およびその表示を行う。ここで、低解像度の三次元モデルの表示を行うことで、最終的な三次元モデルの完成の途中の段階をユーザが把握することができる。
(もっと読む)
木構造抽出装置および方法ならびにプログラム
【課題】それぞれ1つの起始部から分岐を繰り返しながら離れる方向に広がって延びる第1および第2の線状構造物を含む医用画像データから、第1および第2の構造物に対応する木構造を精度よく構築する。
【解決手段】第1および第2の線状構造物のそれぞれ1つの起始部から分岐を繰り返しながら離れる方向に広がって延びるという特徴に基づいて、各ノードごとに、各ノードに接続可能な複数のエッジについて接続しやすさを表すコストを重み付けするコスト関数により、第1の木構造の根ノードに対応する第1の根ノードと第2の木構造の根ノードに対応する第2の根ノードのそれぞれから各ノードを接続する。
(もっと読む)
奥行調整が可能な立体映像表示装置
【課題】 背景領域に過度に奥行範囲を割り当てることなく、手前側の奥行感が強調され、自然な奥行感を再現できる立体映像表示装置を提供する。
【解決手段】1実施形態の立体映像表示装置は、入力画像から奥行値を生成する奥行情報生成部11と、前記奥行値を調整し、調整された奥行値を生成する奥行調整部12と、前記入力画像及び前記調整された奥行値から、右視点用画像及び左視点用画像を生成する画像生成部と、前記右及び左視点用画像に基づいて、立体映像を表示する画像表示部14と、を備え、前記奥行調整部12は、各奥行値の頻度に対して、奥行値に応じた重み付けを行うことによって奥行値の重み付きヒストグラムを求め、該ヒストグラムから得られる重み付き累積ヒストグラムを用いて奥行値を調整することを特徴とする。
(もっと読む)
計測方法
【課題】内視鏡装置を用いて三次元形状の計測を短時間で行う計測方法を提供すること。
【解決手段】被検物の三次元形状を内視鏡装置を用いて計測する計測方法であって、所定の縞パターンを内視鏡装置の1箇所から被検物に投影し、被検物において縞パターンが投影された部分を撮像して1枚のパターン投影画像を取得し、空間的位相シフト法またはフーリエ変換法を用いて縞パターンが投影された部分の三次元形状を1枚のパターン投影画像から計測することを特徴とする。
(もっと読む)
環境認識装置および環境認識方法
【課題】対象物の特定効率および特定精度を向上し、処理時間の短縮化を図る。
【解決手段】環境認識装置130は、検出領域内に存在する対象部位の輝度を取得し、対象部位の高さを取得し、データ保持部152に保持された、輝度の範囲と道路表面からの高さの範囲と特定物との対応付け(特定物テーブル)に基づいて、対象部位の輝度と高さとから、対象部位に対応する特定物を仮決定、または、グループ化された対象物に対応する特定物を決定する。
(もっと読む)
位置姿勢計測装置、位置姿勢計測方法
【課題】 従来の2次元画像と距離画像を併用した場合の位置姿勢計測手法に比べて、複雑背景下であっても高速かつロバストに位置姿勢を計測すること。
【解決手段】 2次元画像対応探索部140は、撮像画像中における仮想物体の幾何特徴と、撮像画像中に映っている現実物体において該幾何特徴に対応する特徴部分と、の対応付けを行う。対応探索領域設定部150は、仮想物体を構成するそれぞれの図形を距離画像上に投影し、該投影された図形の領域から、特徴部分に対応する距離画像内の部分の周辺を省いた残りの領域を、対応探索領域として設定する。位置姿勢算出部170は対応探索領域内の画素の奥行き値が示す位置と該画素に対応する仮想物体上の位置との3次元空間における距離、幾何特徴と特徴部分との3次元空間における距離、を表す評価関数を最小化するように位置姿勢情報を繰り返し更新する。
(もっと読む)
画像処理装置および方法、記録媒体並びにプログラム
【課題】正確に3次元座標を検出できるようにする。
【解決手段】取得部が、魚眼レンズを介して撮影した画像である魚眼画像を取得し、変換部が、魚眼画像を変換して、変換画像を生成し、認識部が、変換画像から認識対象の画像を認識する。本発明は画像処理装置に適用することができる。
(もっと読む)
医用画像処理装置および方法、並びにプログラム
【課題】3次元医用画像中の気管支のグラフ構造をより高い精度で構築する。
【解決手段】連続領域抽出部32が、気管支が表された3次元医用画像から、太い気管支内部の空気領域に対応する画素値を有する連続領域を抽出し、木構造構築部33が連続領域に対応する木構造を構築する。一方、線状構造抽出部34が、3次元医用画像中の各点の近傍の局所的な濃淡構造を解析することによって、細い気管支の断片を表す複数の線状構造を抽出する。木構造再構築部35は、太い気管支のグラフ構造を構成するノードと細い気管支の線状構造を表すノードを接続することによって、気管支全体を表すグラフ構造を再構築する。その際、太い気管支のノードと細い気管支の線状構造のノードとを結ぶ区間と、線状構造のノード同士を結ぶ区間とでは異なるコスト関数を用い、前者の区間におけるコスト関数は、画素値の変化が小さい区間ほど接続されやすくなるように定義した。
(もっと読む)
カメラポーズ推定装置、カメラポーズ推定方法及びカメラポーズ推定プログラム
【課題】移動物体が含まれる場合においても正確にカメラポーズを算出する。
【解決手段】実空間中の点の3次元座標と、3次元座標が有するテクスチャ情報と、3次元座標が移動物体上か否かを示す移動物体フラグとを3次元点IDに関連付けた3次元リスト情報を記憶する手段と、移動物体フラグが0である3次元点の対応付けを行う3次元点対応付け手段と、最適カメラポーズ情報を出力するカメラポーズ算出手段と、最適カメラポーズ情報を用いてアウトライヤ対応点リスト情報内の3次元座標がフレーム画像に射影される再射影点を決定し、該再射影点とアウトライヤ対応点リスト情報内の対応点座標から算出する動きベクトルを用いて対象の3次元座標が移動物体上か否か判定し、移動物体と判定された場合は、処理対象のアウトライヤ対応点リスト情報内の3次元点IDに対応する移動物体フラグを1に更新して、最終的な最適カメラポーズを出力する。
(もっと読む)
医用画像データをセグメント化するための方法及び装置
【課題】対象物、特に心臓弁の非平坦表面の医用画像を自動的にセグメント化するための方法及び装置を提供する。
【解決手段】対象物1の非平坦表面4の境界を定める表面境界2を検出する段階と、表面境界2内で広がるモデル表面5aを作成する段階と、モデル表面5aと対象物1の非平坦表面4との間の距離に関する情報を含む距離情報8によって、補正モデル表面5bが生成されるまでモデル表面5aを補正する段階と、補正モデル表面5bを描写する段階とを含む方法及び装置に関する。モデル表面5aの補正が、好ましくは、三次元又は四次元画像データセットを用い、対象物1の三次元ボリュームレンダリングをモデル表面5aに対して実質的に垂直に向けることによって実行され、これにより、モデル表面5aと対象物1の非平坦表面4との間の距離に関する情報を、補正モデル表面5bが生成されるまで評価することができる。
(もっと読む)
101 - 120 / 1,504
[ Back to top ]