
Fターム[5B057DB03]の内容
画像処理 (340,757) | 分析部 分析画像の特性 (30,351) | 三次元 (1,504)
Fターム[5B057DB03]に分類される特許
141 - 160 / 1,504
画像処理装置および画像処理システム並びに画像処理方法
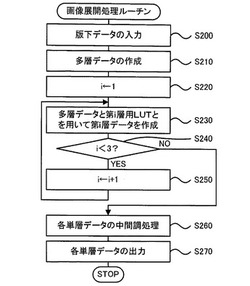
【課題】複数回の画像形成を要する画像データの画像を媒体に形成できるようにする。
【解決手段】汎用色CMYKの色値で画像が表現された多層データを取得し(ステップS210)、多層データにおける汎用色CMYKの色値と3つの単層データのそれぞれにおける汎用のインク色cmykのインク量との対応関係を定めた3つの展開用LUTを用いて多層データを3つの単層データ(第1層〜第3層データ)に展開する(S220〜S250)。
(もっと読む)
面形成支援システム、面形成支援装置、及び面形成支援プログラム

【課題】本発明は、施工作業に要する時間を短縮させることができる面形成支援システム、面形成支援装置、及び面形成支援プログラムを提供する。
【解決手段】仮想空間において、予め定められた目標面に表示された所定画像を予め設定した複数の撮影位置から予め設定した撮影方向に向けて仮想的に撮影することにより得られる撮影位置毎の画像情報を生成する情報生成装置と、実空間において、目標面に対する複数の撮影位置と同一の位置関係になるよう各々設置され、対応する画像情報により示される画像を、前記目標面を形成する際の基礎となる基礎面に、対応する撮影方向に向けて投影する複数の投影装置と、を備えた。
(もっと読む)
画像処理装置および画像処理方法
【課題】低解像度化された視差画像が送信される場合において、受信側で、その視差画像を用いて所定の視点の画像を高精度に生成することができるようにする。
【解決手段】視差画像高解像度化部は、互換画像の解像度の1/2の解像度の補助画像の視差画像をそれぞれ高解像度化する。視差画像ワーピング処理部は、仮想視点の位置に基づいて、高解像度化された補助画像の視差画像のワーピング処理を行うことにより、仮想視点の視差画像を生成する。スムージング処理部は、仮想視点の視差画像内のオクルージョン領域の0以外の視差値を、0に補正する。本技術は、例えば、メガネ無し方式の3D画像を復号する復号装置に適用することができる。
(もっと読む)
3次元環境復元装置、その処理方法、及びプログラム
【課題】マップ情報の精度を維持しつつ、マップ情報のメモリ消費量を効果的に低減すること。
【解決手段】3次元環境復元装置は、所定空間内の対象物体の3次元計測を行う計測手段と、計測手段により計測された対象物体の3次元計測データに基づいて、3次元環境が格子領域に区切られて対象物体が存在する格子領域に直方体が配置され、配置された直方体内に3次元点群データを含むマップ情報を生成するマップ情報生成手段と、マップ情報生成手段により生成されたマップ情報の直方体内の3次元点群データに基づいて、3次元点群データを線分近似した芯線情報を生成する芯線情報生成手段と、を備えている。
(もっと読む)
ステレオ画像処理装置及びステレオ画像処理方法
【課題】テクスチャの弱い領域を有する画像であっても、画像の対応付けに際しミスマッチングを軽減して高精度の視差検出を行うことができるステレオ画像処理装置、方法を提供する。
【解決手段】第一の画像と第二の画像が入力されると、第一の画像の第一の画素データを相互に異なる位置に含む複数の第一のウィンドウの各々について、当該第一ウィンドウと、指定された視差データに対応した前記第二の画像の第二のウィンドウとの間の非類似性に応じた評価値であるウィンドウコストを生成する。次に、第一のウィンドウのウィンドウコストに、第一の画素データに隣接する三以上の画素データのウィンドウコストを累積加算した累積加算コストを集計した修正コストを計算し、計算した修正コストに基づいて第一の画像の画素データそれぞれの対応点を第二の画像において求め、視差データを出力する。
(もっと読む)
段差エッジ推定装置
【課題】撮像手段により取得されるステレオ画像を利用して、階段等の段差部の平坦面部の先端部のエッジの位置及び方向を精度良く推定することを可能とする装置を提供する。
【解決手段】撮像手段3R,3Lにより撮像した2つの撮像画像(ステレオ画像)を用いて段差部(階段)50の段差エッジ52の位置及び方向を推定する。第1の撮像画像に設定した領域における画像の素値分布と、第2の撮像画像の対応領域における画像を平面パラメータに応じて射影変換してなる画像の画素値分布との間の誤差を表す誤差関数を線形結合して構成される評価関数を算出し、この評価関数の値を最小化するように、段差エッジの位置及び方向を表す段差エッジパラメータを探索的に特定する。
(もっと読む)
撮影装置、撮影装置の制御装置、撮影装置の制御プログラム、及び撮影装置の制御方法
【課題】被写体の三次元画像を精度良く生成できる撮影装置、撮影装置の制御装置、撮影装置の制御プログラム、及び撮影装置の制御方法を提供する。
【解決手段】撮影装置100は、被写体を撮影する撮影部と、撮影された撮影画像を用いて、被写体の三次元モデルを生成するモデル生成部143aとを備える。また、撮影装置100は、生成された三次元モデルからノイズを除去するノイズ除去部143dと、ノイズが除去された三次元モデルに基づいて、三次元画像を生成する三次元画像生成部145と、を備える。ここで、ノイズ除去部143dは、生成された三次元モデルを構成する点に対応する対応点が、当該三次元モデルの生成に用いられた撮影画像の撮影位置と異なる位置から撮影された撮影画像を用いて生成された三次元モデルを構成しない場合に、当該点はノイズであると判定する。
(もっと読む)
全方位画像生成方法、画像生成装置およびプログラム
【課題】複数の画像から奥行きのあるシーンの全方位画像を生成する。
【解決手段】複数の画像から奥行きのあるシーンの全方位画像を生成する全方位画像生成方法であって、複数の視点位置から被写体を撮像した画像を取得するステップと、取得したそれぞれの画像を予め定義した複数のレイヤ面に投影するステップと、画像が投影されたレイヤ面上における被写体の色情報または輝度情報とを算出するステップと、取得した画像上の被写体の点をレイヤ面上に投影した画像の点との類似度を求めることにより、レイヤ面上の各点における被写体の存在確率を表す信頼度を算出するステップと、信頼度に基づき、被写体の信頼度が最も高いレイヤを中心として複数のレイヤを選択するステップと、選択されたレイヤ面上における被写体の色情報または輝度情報と信頼度情報に基づき、奥行きのあるシーンの全方位画像を生成するステップとを有する。
(もっと読む)
形状認識装置、形状認識方法、および、そのプログラム
【課題】コネクタ等の固定部にケーブル等の可変部を加えた3次元モデルを通じて認識対象物を的確に抽出する。
【解決手段】形状認識装置120は、固定部と内部自由度を有する可変部とを含み長手軸を有する3次元モデル122を示す3次元モデル情報を保持するモデル保持部210と、認識対象物112の3次元形状を示す認識対象情報を取得する認識対象情報取得部230と、認識対象情報と3次元モデル情報とに基づき、長手軸に対して対称な2つの候補姿勢をつくり、認識対象物と、可変部の内部自由度を変化させた3次元モデルとをパターンマッチングして認識対象物の位置および姿勢を特定する認識対象物特定部234とを備える。
(もっと読む)
データ処理装置、データ処理方法およびプログラム
【課題】空間的な広がりを有するデータを、その特徴を適切に反映したデータに縮小できる、データ処理装置、データ処理方法およびプログラムを提供する。
【解決手段】n(n:2以上の自然数)次元のデータテーブルを読出し(ステップS102)、データテーブル上で第1次元方向のデータ配列毎に最頻値を求め(ステップS103)、第1次元方向を除くn−1次元方向のデータ配列毎に第1次元方向のデータ配列毎の最頻値の存在数を求め(ステップS104)、最頻値の存在数が最大となるn−1次元方向のデータ配列をデータテーブルから抽出する(ステップS106)。
(もっと読む)
形状認識装置、形状認識方法、および、そのプログラム
【課題】単純な形状に限らず認識対象物を的確に抽出する。
【解決手段】形状認識装置120は、軸を有する3次元モデル122を示す3次元モデル情報を保持するモデル保持部210と、認識対象物112の3次元形状を示す認識対象情報を取得する認識対象情報取得部230と、認識対象情報と3次元モデル情報とに基づいて、認識対象物または3次元モデルを対称的に配置した2つの姿勢候補を示す姿勢候補情報を生成する姿勢候補情報生成部234と、認識対象物の姿勢候補情報と3次元モデル情報とに基づいて、または、認識対象情報と3次元モデルの姿勢候補情報とに基づいて認識対象物の位置および姿勢を特定する認識対象物特定部236とを備える。
(もっと読む)
サムネイル抽出プログラム及びサムネイル抽出方法
【課題】3次元映像に適したサムネイルを抽出できるサムネイル抽出プログラム及びサムネイル抽出方法を提供することを課題とする。
【解決手段】3D映像の一フレームを構成するフレーム画像ペア間で対応する特徴点を特徴点ペアとしてフレーム画像ペアから抽出し、特徴点ペアの奥行き量を特徴点ペアの点間距離、レンズ間距離・焦点距離を基に算出して、奥行き量で前記特徴点ペアをクラスタリングし、予め定められたクラスタリングの結果情報に基づくフレーム画像ペアの立体的な見え易さの評価条件を基に、1以上のフレーム画像ペアのクラスタリングの結果情報から1以上のフレーム画像ペアの立体的な見え易さを評価し、立体的な見え易さの評価結果に基づき、評価結果の最も良い前記フレーム画像ペアを、サムネイル用の前記フレーム画像ペアとして抽出する処理をコンピュータに実行させるサムネイル抽出プログラムにより上記課題を解決する。
(もっと読む)
三次元計測装置
【課題】計測精度に優れた三次元計測装置を提供すること。
【解決手段】対象物の三次元形状を計測する三次元計測装置であって、対象物へ向けて計測光を射出する光射出部と、計測光を発光する光源を有し、計測光を光射出部に供給する光供給部と、光源と光射出部とを相対移動させる移動部と、計測光が照射された対象物を撮像する撮像部と、撮像部による撮像結果及び移動部による移動結果に基づいて、対象物の三次元形状を求める演算部とを備える。
(もっと読む)
3次元データと2次元データの統合方法及びこれを用いた見守りシステム、監視システム
【課題】距離画像データ等の3次元データと2次元画像データとの対応付け、距離画像データと2次元画像データを相補的に用いることにより柔軟で信頼性の高い認識結果が得られる、3次元データと2次元画像データの統合方法およびそれを用いた頑健な監視・見守りシステムを提供する。
【解決手段】システムは、2次元データを取得する2次元データ取得ステップと、3次元データを取得する3次元データ取得ステップと、上記2次元データと前記3次元データの位置を対応付ける対応付けステップと、上記対応付けステップで対応付けた結果に基づいて上記3次元データを2次元データ上に重畳する重畳ステップとを備える。
(もっと読む)
視線位置検出装置、視線位置検出方法、及びコンピュータプログラム
【課題】ユーザの視野画像に基づいて、ユーザが何を見ているのかを容易に且つ確実に自動で検出できるようにする。
【解決手段】視野カメラ画像のSIFT特徴点Siと、視認対象画像のSIFT特徴点Tjとを抽出し、抽出したSIFT特徴点Si、Tjの対応点を導出する。次に、対応点である「視野カメラ画像のSIFT特徴点Si」を頂点とするドロネー三角形を形成する。次に、ドロネー三角形の頂点の中から、作業者の視線位置の近傍の三点を視線位置近傍特徴点A、B、Cとして選択する。次に、「視線位置近傍特徴点A、B、C」から見た場合の「視野カメラ画像における作業者の視線位置の点P」の位置関係と同じになるように、「視線位置近傍特徴点A、B、C」に対応する「視認対象画像のSIFT特徴点A´、B´、C´」の画像上の座標から、「視認対象画像における作業者の視線位置の点P´」を求める。
(もっと読む)
画像生成装置及び方法
【課題】画素補完処理を施すことなく高解像度な合成画像を簡便に生成する。
【解決手段】多眼カメラは、二次元状に配列している複数の撮影レンズと、各撮影レンズにより結像する被写体像を個別に撮像する撮像素子と、各撮像素子から得られる複数の画像を合成する合成処理部25をもつ。合成処理部25は、相対位置検出部40、重合部41、及び画素配置部42からなる。相対位置検出部40は、ある基準の画像に対する残りの画像との相対位置をそれぞれ検出する。重合部41は、複数の画像を、多画素化した仮想の画像領域上で相対位置に基づくズレがゼロになるように重ね合わせる。画素配置部42は、仮想の画像領域を構成する各画素の中心に、中心が最も近い画素を、重ね合わせた複数の画像の中から選択して配置していくことで単一の合成画像を生成する。
(もっと読む)
非触覚ユーザインタフェース用場面プロファイル
【課題】非触覚検知に基づくコンピュータシステム用ユーザインタフェースを提供する。
【解決手段】非触覚インタフェースを実行するコンピュータに接続するディスプレイの近くに1人以上のユーザを有する場面の画像を獲得するステップと、前記画像を処理し、前記1人以上のユーザのプロファイルを生成するステップとを有する。コンテンツはその後、前記ディスプレイ上に上映するため前記プロファイルに対応して選択される。
(もっと読む)
誤差検出装置及び誤差検出プログラム
【課題】対象物の撮影画像の撮影方向及び撮影距離等に基づく二次元表示上の誤差の許容量を考慮して、対象物の当該対象物の設計情報に対する誤差を検出する誤差検出装置及び誤差検出プログラムを提供する。
【解決手段】誤差検出装置1は、対象物三次元情報113の表示画像と対象物の撮影画像情報111とを位置合わせする位置合わせ手段101と、撮影の視点となる座標と対象物三次元情報113の対象物を構成する面との距離及び撮影方向と面とのなす角度に基づいて算出される二次元表示上の誤差の許容量を、対象物三次元情報113の表示画像の座標に対応づけて誤差マップ114を生成する誤差マップ生成手段102と、対象物三次元情報113の表示画像及び撮影画像情報111から対象物の輪郭となるエッジ点を抽出するエッジ抽出手段103と、エッジ点と誤差マップ114とを比較してエッジ点が誤差を有するか否か判定する誤差点判定手段104とを有する。
(もっと読む)
位置姿勢計測装置及び位置姿勢計測方法
【課題】画像と3次元形状モデルの誤対応を減らし、高速でロバストな物体の位置及び姿勢の計測を実現する。
【解決手段】物体の3次元形状モデルを保存する保存部110と、物体の濃淡画像を入力する濃淡画像入力部130と、物体の距離画像を入力する距離画像入力部150と、位置姿勢計測装置100に対する物体の概略の位置及び姿勢を入力する概略位置姿勢入力部120と、濃淡画像の情報を利用して、物体の概略の位置及び姿勢をもとに物体の第1の位置及び姿勢を算出するとともに、第1の位置及び姿勢を用いて算出される3次元形状モデルの画像面上での投影位置をもとに、距離画像から得られる3次元点群または当該3次元点群及び濃淡画像の画像特徴群と、3次元形状モデルとの対応付けを行い、当該対応付け結果に基づいて第2の位置及び姿勢を算出する位置姿勢算出部160を備える。
(もっと読む)
車両識別装置
【課題】自車の周囲にある他車がおかれている環境の影響を受けずに当該他車を高精度に検出することを課題とする。
【解決手段】偏光カメラ10が撮像したP偏光画像及びS偏光画像をそれぞれ所定の識別処理領域に分割し、各識別処理領域について、P偏光成分及びS偏光成分の合計値に対するP偏光成分及びS偏光成分の差分値の比率を示す差分偏光度を算出し、算出した各識別処理領域の差分偏光度が所定の閾値以上であれば、その識別処理領域を他車の窓ガラスを映し出した窓ガラス領域であると識別し、その識別結果から撮像領域内の他車を映し出した他車領域を識別する。
(もっと読む)
141 - 160 / 1,504
[ Back to top ]