
Fターム[5B057DB03]の内容
画像処理 (340,757) | 分析部 分析画像の特性 (30,351) | 三次元 (1,504)
Fターム[5B057DB03]に分類される特許
161 - 180 / 1,504
マップ変換方法、マップ変換装置及びマップ変換プログラム
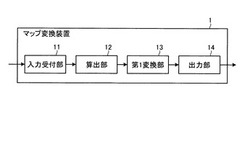
【課題】3次元画像の表示に関し、再現可能な奥行き範囲内でより良好な奥行き感を得られるように奥行きマップを変換可能なマップ変換技術を提供する。
【解決手段】マップ変換装置は、3次元画像の表示に関し、入力画像の一部の画素を含む画像領域の奥行きを画素毎に示す奥行きマップを用いて、奥行きの存在頻度の累積を表す累積ヒストグラムを算出し、当該累積ヒストグラムを用いて、入力画像における奥行きマップを、出力先における奥行き範囲内の奥行きを画素毎に示す奥行きマップに変換する。
(もっと読む)
画像処理装置およびプログラム

【課題】被写体および被写体外を含む視差マップを、処理量を抑えつつ得ることができる画像処理装置を提供すること。
【解決手段】少なくとも2つの視点の画像から視差マップを生成する画像処理装置であって、2つの視点の画像のうち、基準とする画像について、被写体の領域を検出する被写体領域検出部と、被写体の領域についてステレオマッチングを行い、該領域の視差マップを生成する被写体領域マッチング処理部と、被写体の領域外についてステレオマッチングを行い、該領域の視差マップを生成する被写体外領域マッチング処理部と、2つの視差マップを合成する合成処理部とを備える。
(もっと読む)
医用画像処理装置、医用画像処理方法、医用画像処理プログラム
【課題】操作者の手を煩わすことなく解剖学的特徴を識別することが出来る医用画像処理装置、医用画像処理方法および医用画像処理プログラムを提供すること。
【解決手段】本実施形態に係る医用画像処理装置1は、被検体に対する医用画像データセットと、注目領域もしくは注目部位に関する複数の解剖学的特徴各々の位置を示す解剖学的標識点と前記注目領域もしくは前記注目部位に関する参照画像データとを有する参照データセットとを記憶する記憶部6と、前記医用画像データセットにおける前記被検体の医用画像と、前記参照データにおける前記注目領域もしくは前記注目部位の画像との位置合わせを実行する位置合わせ部14と、前記位置合わせに基づいて、前記解剖学的標識点を前記医用画像に割り当てる割り当て規則を決定する割り当て規則決定部18と、前記決定された割り当て規則を用いて、前記医用画像に前記解剖学的標識点を割り当てる割り当て部20と、を具備することを特徴とする。
(もっと読む)
距離情報符号化方法,復号方法,符号化装置,復号装置,符号化プログラムおよび復号プログラム
【課題】カメラから被写体までの距離を表す距離情報を効率的に符号化する。
【解決手段】三次元点復元部1021で,カメラから被写体までの距離を符号化対象の距離の基準となっているカメラの位置や向きによらない三次元位置を表す値に変換し,変換距離情報計算部1022で,その三次元位置をその座標値の表す点から予め定められた三次元空間上の数直線に下ろした足に対する値へ変換し,変換距離情報量子化部1023で,その値を量子化する。その量子化された値を距離情報符号化部103で符号化する。
(もっと読む)
シミュレーション装置の画像データ生成装置
【課題】設計時間を長くすることなく、納品先の工場と類似する環境をシミュレーション装置に再現可能にする。
【解決手段】本発明のシミュレーション装置の画像データ生成装置は、現実の工場においてカメラで撮影して得られた複数の2次元撮影画像を、その撮影角度データと共にシミュレーション装置に入力する手段と、検査対象のワークの3次元データを入力する手段と、複数の2次元撮影画像の中から、検査カメラの撮影角度と一致する撮影角度データを有する2次元撮影画像を選択して背景画像とする手段と、検査カメラの光軸に対して背景画像の平面が直交するように設定する手段と、背景画像上にワークを重ねて配置したものを検査カメラにより撮影して得られる画像を計算により求め、この求めた画像を検査カメラ画像として出力する手段とを備えている。
(もっと読む)
テクスチャ評価装置、テクスチャ評価方法
【課題】対象物の表面において多数の凹凸が繰り返し形成された領域全体についての評価が可能なテクスチャ評価装置、テクスチャ評価方法を提供する。
【解決手段】テクスチャ評価装置1は、3次元計測部2と、3次元計測部2から計測データを入力する入力部3と、距離画像の生成などを行う演算部4と、評価結果を表示する表示部6とを備えている。3次元計測部2は、対象物10表面までの距離を計測し、計測した距離値を計測データとして入力部3に出力する。演算部4は、3次元計測部2から入力部3に入力された距離値を用いて、距離値を画素値とする距離画像を生成する距離画像生成部41を有している。さらに、演算部4は、距離画像の全体についてのテクスチャの凹凸の形状を表す測度の分布を求め、当該分布の統計量を特徴量として算出する特徴量算出部42と、算出された特徴量に基づいてテクスチャの評価を行う評価部43とを有している。
(もっと読む)
特徴検出装置、特徴検出方法、およびそのプログラム
【課題】 複数のカメラそれぞれで過去のフレーム結果と比較することで精度よく過去のフレームの結果を引継ぎ、特徴検出処理の処理負荷を低減する。
【解決手段】 ステレオ撮像した第1の映像と第2の映像からマーカを検出する探索ラインを設定し、探索ラインに沿って、第1の映像と第2の映像の両方の現在のフレームからマーカを検出し、フレームから検出したマーカの位置をマーカ情報として記録し、検出中に、検出中のフレームから検出したマーカの位置と、マーカ情報に基づく過去のフレームから検出したマーカの位置とが、予め設定された閾値以内であるか否かを判定し、閾値以内であると判定された数が、予め設定された個数以上であるか否かを判定し、個数以上であると判定された場合に、マーカの検出を中断し、過去のフレームのマーカ情報を現在のフレームのマーカ情報として記録する。
(もっと読む)
空席判定装置、及び、空席判定方法
【課題】乗員の体格や姿勢等に拘わらずシート上の乗員の存否を正確に判定することのできる空席判定装置、及び、空席判定方法を提供する。
【解決手段】距離画像データを取得する距離画像センサ4を設ける。取得したデータを直交座標画像と平面投影二値画像に変換するデータ変換手段40と、変換した画像を基にシートバック位置とシートクッションの位置を推定する位置推定手段25,26を設ける。さらに、シート以外の物体が存在することを意味する特徴量が、直交座標画像や平面投影二値画像のシートバックとシートクッションの各推定位置に含まれるか否かを判定する物体存否判定手段27,28を設ける。両物体存否判定手段27,28がともに特徴量が含まれていないものと判定したときに空席と判定する最終判定手段29を設ける。
(もっと読む)
乗員検知装置
【課題】大人と子供とを精度良く判別する。
【解決手段】乗員検知装置10は、単眼距離画像センサ11から出力される距離画像に基づき、乗員領域の体積を推定し、該体積が所定体積閾値以上であるか否かを判定する体積判定部56と、車両上下方向の所定位置よりも下方側に車室内の乗員の膝部が存在するか否かを判定する膝部判定部57と、体積判定部56により乗員領域の体積が所定体積閾値以上であると判定された場合であって、膝部判定部57により所定位置よりも下方側に膝部が存在すると判定された場合には乗員は大人であると判定し、膝部判定部57により車両上下方向の所定位置よりも下方側に膝部が存在しないと判定された場合には乗員は子供であると判定する乗員判定部58とを備える。
(もっと読む)
書画カメラ、書画カメラの制御方法、プログラムおよび表示処理システム
【課題】3次元画像を表示させることのできる書画カメラ、書画カメラの制御方法、プログラムおよび表示処理システムを提供する。
【解決手段】表示装置(プロジェクター10)に接続されて用いられる書画カメラ1であって、複数の撮像部(カメラ2,3)と、複数の撮像部のうち、2つの撮像部により同一の撮像対象を異なる撮像位置から撮像した2つの画像データを生成する画像処理部14と、表示装置により表示される2つの画像データの画像間距離を決定するためのパラメータを取得するパラメータ取得部(カメラ位置取得部16)と、表示装置に対して、2つの画像データ、並びにパラメータまたは画像間距離を出力する出力部15と、を備えたことを特徴とする。
(もっと読む)
乗員頭部検知装置
【課題】演算負荷の増大を防止しつつ検知精度を向上させる。
【解決手段】乗員頭部検知装置10は、単眼距離画像センサ11から出力される距離画像を構成する複数の画素毎に3次元空間での法線ベクトルの逆方向に固定長の逆ベクトルを算出し、該逆ベクトルにより指定される3次元空間での位置座標を内部座標とする内部座標設定部52と、3次元空間を構成する複数の単位空間毎に該単位空間内に含まれる内部座標の総数に係るスコア値を算出し、複数の画素毎に対応する内部座標が含まれる単位空間のスコア値を複数の画素毎に対応させて示すスコア画像を生成するスコア画像生成部53とを備え、スコア画像を構成する複数の画像領域のうちからスコア値に基づいて車室内の乗員の頭部領域を抽出する。
(もっと読む)
乗員検知装置
【課題】乗員とチャイルドシートとの存在を精度良く判定する。
【解決手段】乗員検知装置10は、単眼距離画像センサ11から出力される距離画像に基づき、乗員の頭部領域を検知する頭部領域検知部52およびシートの領域を検知するシート領域検知部53と、シートの領域を距離画像から除去して得られるシート領域除去画像に基づき、頭部領域を有する乗員領域の体積を推定し、該体積が所定体積範囲内であるか否かを判定する体積判定部54と、乗員領域の体積が所定体積範囲内であると判定された場合に、頭部領域の断面画像と乗員領域の断面画像とを比較し、乗員の肩部の有無を判定し、乗員の肩部が存在すると判定された場合には乗員領域には大人が存在すると判定し、乗員の肩部が存在しないと判定された場合には乗員領域にはチャイルドシートおよび該チャイルドシートに着座した子供が存在すると判定する乗員判定部56とを備える。
(もっと読む)
画像処理装置、および画像処理方法、並びにプログラム
【課題】異なる視点から撮影された画像の3次元画像としての適正を判定し、判定結果に応じて記録や出力画像の設定を変更する。
【解決手段】異なる視点からの撮影画像の画像領域単位の被写体距離を解析して、画像の3次元画像としての適正を判定する。例えば、L画像とR画像各々の対応座標位置の被写体までの距離の差分データの全てまたは予め設定した割合以上が、既定しきい値未満である場合は、3次元画像表示における立体感の想起レベルが低いと判定し、2次元画像の記録、出力を行い、既定しきい値未満の差分でない場合は、3次元画像表示における立体感の想起レベルが高いと判定し、3次元画像の記録、出力を行う。
(もっと読む)
表示制御プログラム、表示制御装置、表示制御方法および表示制御システム
【課題】立体視に伴う不快感が抑制、緩和された画像の表示が可能とする表示制御プログラム等の提供。
【解決手段】立体視表示可能な表示装置に所定の仮想空間の表示を行う表示制御装置のコンピュータで実行される表示制御プログラムであって、コンピュータを、仮想空間に所定のオブジェクトを配置するオブジェクト配置手段と;仮想空間の仮想的な撮影に用いられる仮想カメラの位置に基づいた視点位置と仮想空間で表示されるオブジェクトとの間に規定される距離を計算し、オブジェクトの透明度を、距離が長くなるほど高くなるように設定する透明度設定手段と;仮想空間を右仮想カメラおよび左仮想カメラで撮影して右眼用画像および左眼用画像を生成する画像生成手段と;画像生成手段で生成した右眼用画像および左眼用画像を表示装置に表示する表示制御手段として機能させる、表示制御プログラム。
(もっと読む)
移動体位置推定装置及び移動体位置推定方法
【課題】異なる場所から検出した特徴点の見え方が各検出場所で変化する場合であっても、移動体の位置を推定することが可能な、移動体位置推定装置及び移動体位置推定方法を提供する。
【解決手段】撮像部2が撮像する周囲画像の撮像範囲内へ投光した線状光が屈曲している部分である折曲部において折曲部平面から予め設定した角度で立ち上がる立ち上がり線を算出する立ち上がり線算出部16と、撮像部2が撮像する周囲画像の撮像範囲の変化に応じて、立ち上がり線算出部16が算出した立ち上がり線と、撮像部2から特徴点までの距離に基づいて、撮像範囲が変化する前の折曲部と撮像範囲が変化した後の折曲部とを照合する特徴点照合部20と、特徴点照合部20が照合した撮像範囲が変化する前の折曲部と撮像範囲が変化した後の折曲部との位置の変位量に基づいて、車両Vの位置を推定する移動体位置推定部22を備える。
(もっと読む)
顔向き検出装置
【課題】ユーザの顔向きを精度良く検出できる顔向き検出装置を提供すること。
【解決手段】顔向き検出装置は、交差する縦縞及び横縞から構成された縞模様の光をユーザの顔に照射する(S11)。その顔をカメラで撮像する(S12)。撮像した顔画像から、光の縞模様を構成する矩形に対応する矩形対応部分をそれぞれ特定する(S13)。矩形対応部分ごとに、各矩形対応部分の変形具合に基づいて各矩形の法線方向を算出する(S14)。三次元モデルDB40に記憶された三次元の顔モデルの各部位の法線方向と各矩形の法線方向との誤差を算出する(S15)。誤差が閾値未満か否かを判断する(S16)。誤差が閾値より大きい場合には(S16:No)、閾値未満になるように顔モデルの三次元パラメータを変更する(S17)。誤差が閾値未満になったときの顔モデルの顔向きを運転者の顔向きとして決定する(S18)。
(もっと読む)
対象物検出装置及び方法
【課題】広い監視領域における大きさが異なる複数の対象物の位置や速度を推定できるようにすること。
【解決手段】本実施形態に係る対象物検出装置は、複数台のカメラにより道路上に存在する対象物を撮影した基準画像上で分割した短冊状領域の各点に関して、他のカメラで撮影された参照画像上で対応する点を算出する対応点算出部4と、各短冊状領域内の各点と、求められた参照画像の対応点との間の画像特徴量の一致度を算出する画像一致度算出部5と、短冊状領域の高さと対象物の接地位置とを変数として画像特徴量の一致度を最大にする接地位置関数を生成する接地位置算出部6と、接地位置関数における短冊状領域の高さに基づいて対象物の高さを算出する対象物高さ算出部7とを備える。
(もっと読む)
3次元形状認識装置及び方法
【課題】画像処理の処理効率の向上と共に相対的位置角度スケールを確実に検出できる3次元形状認識装置を実現することが求められる。
【解決手段】本実施形態によれば、3次元形状認識装置は、入力部と、幾何学的要素抽出部と、幾何学的要素対応付け処理部と、位置角度推定処理部とを備えた構成である。入力部は、同一の3次元形状の認識対象に対する複数の形状データを入力する。幾何学的要素抽出部は、前記各形状データのそれぞれから幾何学的要素を抽出する。幾何学的要素対応付け処理部は、角度または距離の比を含む相似不変量をキーとするハッシュテーブルを使用し、前記各幾何学的要素間で位置関係が合致する組み合わせを選出する。位置角度推定処理部は、前記選出される複数の組み合わせに基づいて前記各形状データ間で前記認識対象の相対的位置角度スケールを示す相対的位置角度情報を算出する。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】撮像される画像内の被写体の動きからジェスチャを検出できるようにする。
【解決手段】奥行画像生成部101は、撮像される画像の画素単位の被写体の撮像位置からの距離からなる奥行画像を生成する。局所先端検出部102は、奥行画像の複数の画素単位で構成されるブロック単位で、撮像位置から近い部分の位置を局所先端部として検出する。凸部検出部103は、複数のブロックで構成される領域毎に、最も手前となる局所先端部となるとき、その局所先端部を凸部として検出し、凸部情報として凸部情報記憶部112に記憶させる。先端部情報更新部121は、検出された凸部となる局所先端部の位置を連続的に追跡し先端部情報記憶部122に記憶させる。軌跡ジェスチャ検出部106は、先端部情報記憶部122にフレーム単位で記憶される先端部情報より軌跡を求めてジェスチャを検出する。本発明は、ジェスチャ認識装置に適用することができる。
(もっと読む)
画像処理装置及び画像処理方法
【課題】 断層像を画像処理する画像処理装置において、複数の層に存在する病変同士の関連性を、疾病に応じて操作者が容易に把握できるようにする。
【解決手段】 眼部の断層像を画像処理する画像処理装置100であって、前記断層像の解剖学的な特徴である眼部特徴を取得する眼部特徴取得部331と、前記眼部特徴により特定される複数の層の中から、所定の種類の疾病に対応する病変を検出するための層を少なくとも2つ指定する層指定部332と、層指定部332により指定された層それぞれから、前記所定の種類の疾病に対応する病変を検出する病変取得部333と、病変取得部333により前記層それぞれから検出された病変を、所定の2次元の画像上に投影することで、合成画像を生成し、表示する合成表示部340とを備える。
(もっと読む)
161 - 180 / 1,504
[ Back to top ]