
Fターム[5B057DB03]の内容
画像処理 (340,757) | 分析部 分析画像の特性 (30,351) | 三次元 (1,504)
Fターム[5B057DB03]に分類される特許
21 - 40 / 1,504
地物情報判読用画像生成方法
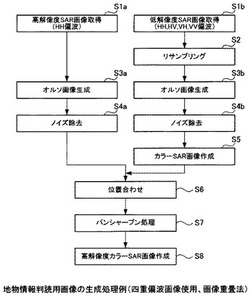
【課題】SAR画像等の単偏波レーダ画像と多偏波レーダ画像とを組み合わせて、より正確な地物情報の判読が可能な合成画像を生成する。
【解決手段】飛翔体に搭載したレーダ装置から得られる、偏波を利用して撮影されたレーダ画像データを基に地物情報判読用画像を生成する際、まずレーダ装置で撮影された地域の低解像度の多偏波レーダ画像データの各々に色情報を割り当てる。次に、その色情報が割り当てられた低解像度の多偏波のレーダ画像データと、レーダ装置で撮影された地域の高解像度の単偏波レーダ画像データを合成し、高解像度のカラーレーダ画像データを得る。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム

【課題】計測精度を向上させることができる画像処理装置、画像処理方法、およびプログラムを提供する。
【解決手段】モニタ22は、計測対象物の画像と、計測対象物に対応する物体であって予め算出された3次元形状を有する物体の画像とを表示する。CPU34cは、計測対象物を撮像したカメラの姿勢と、物体を撮像した仮想的なカメラの姿勢とが近づくように、計測対象物の画像と物体の画像との少なくとも一方の姿勢を調整する。また、CPU34cは、これら2種類のカメラの光学系または撮像素子の特性が互いに近づくように、計測対象物の画像と物体の画像との少なくとも一方の姿勢を調整する。CPU34cは、これらの調整を行った後、リモコン23を介して入力される指示に基づいて指定された計測位置に対応する物体上の空間座標を算出し、算出した空間座標に基づいて、物体のサイズを算出する。
(もっと読む)
3次元形状計測装置
【課題】対象物体の全周3次元モデルの計測に必要な情報を短時間に取得する。
【解決手段】スタジオ装置10は、パネル101〜105が側面及び上面に配置され接合されて底面が開放された形状の筐体に対して、筐体内部を複数方向から選択的に照射する照明装置111〜118を配備すると共に、筐体内部を複数方向から撮影する撮影装置121〜125を配置し、底面側から対象物体に被せて使用する。演算制御装置20は、照明装置111〜118に筐体内部を複数方向から選択的に照射させ、照射の切り替えに応じて任意の撮影装置の撮影画像を取得し、これらの撮影画像から対象物体の形状を示す3次元情報を演算し、この3次元情報に基づいて全周3次元モデルを作成する。表示装置30は演算制御装置20で作成された全周3次元モデルを表示する。
(もっと読む)
画像処理装置、車両
【課題】コスト低減が可能な、ステレオカメラを用いた画像処理装置を提供する。
【解決手段】複数のステレオカメラを備え、車両周辺の対象物との距離を検出する画像処理装置100であって、車載されたセンサと、センサの検出信号を組み合わせて車両状況を判定し、車両状況に基づき画像処理対象の画像データを運転支援用のステレオカメラが撮影した画像データからドア開閉支援用のステレオカメラが撮影した画像データに切り替える状況判断・画像選択手段11と、状況判断・画像選択手段によって選択された画像データに、相関演算部が複数のステレオカメラに共通の相関演算処理を行うことを可能にする前処理手段12と、1つのステレオカメラが撮影した2つの画像データに相関演算を施す相関演算手段13と、相関演算手段の演算結果を用いて対象物までの距離を検出する距離検出手段14と、を有する。
(もっと読む)
運転支援装置
【課題】車輪の縁石への接触もしくは側溝への脱輪の発生するおそれがある場合の警告にステアリングの操舵力制御を用いることで、車輪の縁石への接触や側溝への脱輪を効果的に抑制する。
【解決手段】撮像手段13、14と、障害物検出手段15と、距離算出手段16とを備えた運転支援装置12において、車輪速検出手段19と、操舵角検出手段20と、操舵制御手段21と、検出された車輪速と検出された操舵角とから車輪の進路を予測する進路予測手段22と、縁石または側溝が検出された場合、予測された車輪の進路と算出された縁石または側溝と車輪との距離とに基づいて車輪が縁石または側溝に予め設定された時間内に到達するかどうかを判定する判定手段23と、車輪が縁石または側溝に予め設定された時間内に到達すると判定された時には操舵反力を大きくする制御装置18とを備えることを特徴とする。
(もっと読む)
映像処理方法及び装置
【課題】深さ情報のみを用いて被写体を検出するに当たって、演算処理速度を高める。
【解決手段】映像処理方法は、映像の深さ情報を獲得するステップと、前記映像から目標物が存在する領域に対する第1関心領域を分離するステップと、前記第1関心領域から目標物に対する候補領域を検出するステップと、前記検出された候補領域が目標物に対応するか否かを判断するステップと、前記候補領域が目標物に対応する場合、前記候補領域を用いて目標領域を検出するステップと、前記検出した目標領域を用いて目標物の姿勢を推定するステップと、前記目標物をモデリングするステップと、を含む。
(もっと読む)
施工補助装置、施工補助方法
【課題】建築物の施工、解体、デザインの製作など、幅広い意味での施工を必要とする施工領域における面積を簡便に算出すると共に、必要となる作業量、作業時間、コスト、材料、素材、材料や素材の量、必要となる機器の種類や大きさなどを推測できる、施工補助装置を提供する。
【解決手段】施工補助装置は、施工対象物100の画像に基づいて、施工対象物100の所定領域の面積を算出する面積算出手段と、施工対象物100の周辺情報を記憶する第1記憶部と、施工対象物100の施工に必要となる要素である施工要素を記憶する第2記憶部と、所定領域の面積、周辺情報および施工要素の少なくとも2以上に基づいて、施工対象物100の施工特性を算出する算出手段と、を備える。
(もっと読む)
顔印象判定チャート
【課題】被験者の顔形状を客観的かつ簡易に評価することを可能にする。
【解決手段】顔印象判定チャート10は、人の頭部形状に関する高次の基底ベクトルの少なくとも一つの重み係数が互いに異なる第一の頭部画像20および第二の頭部画像30が対比可能に配置されている。顔印象判定チャート10を参照して被験者の顔形状を目視観察することにより、被験者の顔に発現している基底ベクトルの次数とその発現度合いを定量的に把握することが可能である。
(もっと読む)
三次元測定対象物の形態調査方法
【課題】レーザー走査装置により三次元測定対象物の形態を正しく測量し、調査する。
【解決手段】三次元測定対象物の形態調査方法であって、レーザー走査装置が調査範囲にレーザーを照射したとき、該レーザーの多数の反射点の各点を、三次元座標化された点として取得し、前記調査範囲の水平面上に多数のグリッドを派生させ、各グリッドの中にある点群の鉛直座標分布から標高値の最も低い低位点を抽出し、各グリッドで抽出された低位点を用いて調査範囲の地形モデルを作成する。
(もっと読む)
3次元計測システム及び3次元計測方法
【課題】外部標定の容易なステレオ撮影による3次元計測システム及び3次元計測方法を提供する。
【解決手段】3次元計測システムは、測定対象物1を複数方向から撮影してステレオ画像20を得るステレオ撮影部11と;測定対象物の全体をカバーする基準体2の一部を構成する、複数の基準マーク4を有するサブ基準体3と;ステレオ撮影部で撮影して得たステレオ画像に基づくサブ基準体が有する複数の基準マークの3次元座標値の撮影測定値fと予め基準計測された基準測定値gとを含む、基準体の3次元数値解析モデルである基準体モデル102を3次元計算空間V中に一体として画成する基準体情報画成部12と;基準体モデルを用いてステレオ撮影部の外部標定要素を算出する標定要素算出部13と;外部標定要素により定位されたステレオ撮影部により撮影される測定対象物のステレオ画像から測定対象物の3次元計測をおこなう3次元計測部14とを備える。
(もっと読む)
画像生成装置、画像生成方法、画像生成装置用プログラム
【課題】オクルージョンに対応でき、低コストで、より少ない演算量で画像を生成する。
【解決手段】複数の撮像装置により第1位置から撮像された第1画像と第2位置から撮像された第2画像の入力を受け付け(S1)、各画像の各画素の色相を求める色相変換を行い(S3)、色相変換された各画像から特徴点を抽出し(S6)、第1画像と第2画像とにおいて対応する特徴点を求め(S7)、対応する特徴点の間の距離を有する視差ベクトルを算出し(S8)、同一画像内における特徴点の間の特徴点間距離を算出し(S10)、特徴点間距離に基づき、第1位置および第2位置いずれか一方から見えない領域に関するオクルージョン情報を求め(S11)、第1位置と第2位置との間に第3位置を設定し(S9)、第3位置の位置関係と、視差ベクトルと、オクルージョン情報とに従い、第3位置から撮像された場合の第3画像を生成する(S13)。
(もっと読む)
距離指標情報推定装置及びそのプログラム
【課題】本発明は、精度が高い距離情報を生成できる距離情報推定装置を提供する。
【解決手段】距離情報推定装置1は、ステレオ画像の類似度である誤差関数を計算する誤差関数計算部10と、距離の連続性を示すスムーズ関数を計算するスムーズ関数計算部11と、基準画像における隣接画素間の色情報の差分絶対値が色情報閾値Tc以下であるか否かによって、隣接画素間でメッセージを伝搬できるか否かを判定するメッセージ伝搬制限判定部12と、誤差関数とスムーズ関数とを含むメッセージを生成・伝搬するメッセージ生成・伝搬部13と、メッセージの評価関数を計算する評価関数計算部14と、評価関数が最小となる距離を、距離情報として推定する距離推定部15とを備える。
(もっと読む)
3次元形状データ処理方法、3次元形状データ処理装置
【課題】3次元形状に対応するデータファイルのサイズを小さく、転送や取り扱いを容易とする。
【解決手段】レーザ光200の走査によって構成される面(走査面)と3次元形状をもつ対象物300との交線上に、各測定点は離散的に存在する。この3次元形状データ処理方法においては、データとして、3次元空間座標の点群データの代わりに、各走査面上における各測定点の平均位置Gnの空間的位置、走査面における座標軸Un、Vn軸の方向、各測定点Pn,i(1≦i≦k)についての、走査面での2次元座標(un,i、vn,i)を記録する。ただし、この2次元座標を記録する代わりに、後述する符号化された値を記録することもできる。
(もっと読む)
医用画像処理装置および方法ならびにプログラム
【課題】左心室が表された3次元の画像データから左心室の心内膜を精度良く検出する。
【解決手段】左心室が表された3次元の画像データから左心室の心内膜を抽出する医用画像処理装置であって、血液領域抽出手段20が、画像データVから左心室内の血液領域を抽出し、凸凹点特定手段30が、抽出された血液領域の輪郭上の複数のサンプル点から凸包を求めることにより、凸包を形成する凸点およびその凸点以外のサンプル点である凹点を特定し、心内膜決定手段40が、凹点の少なくとも一部をその凹点周辺に位置する複数の凸点との位置関係に基づいて定められる量だけ血液領域の外側へ移動させることによって変形された血液領域の変形後の輪郭を前記心内膜として決定する。
(もっと読む)
自分撮り判断装置、撮像装置、プログラム及び自分撮り判断方法
【課題】簡易かつ高精度に自分撮りを判断することができる。
【解決手段】撮像素子によって撮像された画像から顔領域を検出する顔領域検出手段(S109、S111)と、検出された顔領域の左下領域および右下領域の少なくとも一方の合焦状態を検出する合焦状態検出手段(S117)と、合焦状態検出手段によって検出された左下領域および右下領域の少なくとも一方の合焦状態が予め定められたレベルより低い場合に、自分撮りと判断する判断手段と、を備えた。
(もっと読む)
ライブ蛍光透視画像を用いた冠動脈モデルの非剛体2D/3Dレジストレーション
【課題】心臓インターベンション中の2D蛍光透視画像を用いたデジタル3D冠動脈モデルの非剛体レジストレーション方法を提供する。
【解決手段】冠動脈ツリーのデジタル化された3D中心線の表示を提供するステップ90と、前記3D中心線を、少なくとも2つの2D蛍光透視画像に、グローバル・アライメントするステップ91と、エネルギー汎関数を最小化することによって、前記3D中心線を、少なくとも2つの2D蛍光透視画像に、非剛体レジストレーションするステップ93と、を含み、前記エネルギー汎関数は、再構築された中心線点とレジストレーションされた中心線点との間の二乗差の総和と、二乗3Dレジストレーション・ベクトルの総和と、二乗微分係数3Dレジストレーション・ベクトルの総和と、心筋分岐エネルギーと、を含む。
(もっと読む)
データ構造、コンピュータプログラム、及びデータ取得装置
【課題】一般的な3次元画像データ作成ソフトウェアを用いた場合であっても、3次元画像データにシミュレーション対象の識別データを付与することを可能としつつ、データ形式の変換に伴う識別データの欠損を抑制する。
【解決手段】部品データ20は、シミュレーション装置10において、生産ラインのシミュレーションに用いられる。部品データ20は、部品の3次元画像を特定する部品形状データ21と、シミュレーションの実行時に表示される表示用テクスチャのテクスチャデータ22と、部品を識別するデータである部品識別データ23と、を備えている。テクスチャデータ22は、部品の3次元画像に対して第1倍率で描かれる画像のデータとして指定され、部品識別データ23は、部品の3次元画像に対して第1倍率よりも小さい第2倍率で描かれるQRコード画像のデータとして指定されている。
(もっと読む)
物体検出装置を搭載する移動体
【課題】演算コストがより低い物体検出装置を搭載する移動体を提供すること。
【解決手段】本発明に係るショベル60は、ショベル60の動作状態を検出する動作状態検出部65と物体検出装置100とを備える。物体検出装置100は、複数のカメラのそれぞれが撮像するカメラ画像の視差に基づいて物体を検出する。また、物体検出装置100は、被撮像空間を通る仮想直線上の複数の検査点のうちの1つに対応する画素を含む部分画像をカメラ画像から抽出する部分画像抽出部10と、同一の検査点に対応する各カメラ画像の部分画像同士の類似度に基づいて検査点に関する評価値を決定する評価値決定部11と、評価値決定部11が決定する評価値を用いて物体の存否を判定する物体存否判定部12とを備える。仮想直線は、ショベル60の動作状態に応じて配置される。
(もっと読む)
画像処理装置
【課題】パターンマッチングの対象となる一対の画像データにおける空間周波数の偏差を抑制することで、適切にパターンマッチングを遂行する。
【解決手段】画像処理装置120は、ベイヤー配列で構成される一対の画像データにおいて、各画素に未設定の色相の輝度を隣接する画素に基づいて復元する色復元部172と、一対の画像データにおいて、各画素に予め設定されている色相の輝度を周囲の画素に基づいて合成する色合成部174と、一対の画像データそれぞれから所定の大きさのブロックを抽出してマッチングを行い、相関性の高いブロック同士を特定するマッチング処理部180と、を備える。こうして、空間周波数の偏差を抑制して適切にパターンマッチングを遂行することが可能となる。
(もっと読む)
段差部認識装置
【課題】ステレオカメラにより取得されるステレオ画像を利用して、階段等の段差部の踏面の先端側エッジの空間的な位置及び方向を含む該段差部を配置位置を精度良く認識することができる装置を提供する。
【解決手段】カメラ3R,3Lのうちの基準画像に、複数条の演算処理領域R3min(k2)を設定すると共に、複数条の演算処理領域R3min(k2)のそれぞれにおける実エッジ投影線L52rの複数の候補位置v(k1)を設定し、各演算処理領域毎に、各候補位置の実エッジ投影線(段差部の先端側エッジの投影線)の位置に対する適合度を表す評価関数の値を射影変換を利用して算出する。実エッジ投影線を推定してなる推定エッジ投影線を、複数条の演算処理領域R3min(k2)のそれぞれにおける推定エッジ投影線の位置の適合度を合成してなる合成適合度が最も高くなるように決定する。推定エッジ投影線と段差部の踏面の平面パラメータとに基づいて段差部の空間的な配置を認識する。
(もっと読む)
21 - 40 / 1,504
[ Back to top ]