
Fターム[5B057DC05]の内容
Fターム[5B057DC05]の下位に属するFターム
重心 (501)
始点、終点、屈曲点、分岐点 (396)
Fターム[5B057DC05]に分類される特許
1,421 - 1,440 / 1,510
顔形状モデリングシステムおよび顔形状モデリング方法
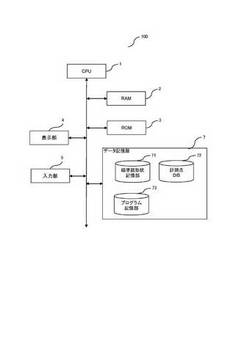
【課題】 特殊な装置を利用せずに、リアリスティックで、作成後の利用が容易な顔形状モデルが得られる顔形状モデリングシステムおよび顔形状モデリング方法を提供する。
【解決手段】 顔形状モデリングシステム100のCPU1は、複数の二次元顔画像から特徴点を抽出する。次にCPU1は、撮像方向の違う各画像における特徴点の対応関係から、特徴点の三次元位置情報を求める。次にCPU1は、求めた特徴点の三次元位置情報に基づいて、GFFDの変形手法を用い、標準顔形状を変形して三次元顔形状モデルを作成する。作成した三次元顔形状モデルに、二次元顔画像のテクスチャを貼付する。
(もっと読む)
乳房画像位置合わせ装置およびそのプログラム

【課題】 乳房画像の読影性能を向上させるための乳房画像位置合わせ装置を提供する。
【解決手段】 異なる2つの乳房画像Sl,Srの各々より乳頭部上の点または乳房領域の頂点を位置合せ基準点Kl,Krとして検出し、異なる2つの乳房画像上の互いに対応する対応点(P1l,P1r),(P2l,P2r)を各々の乳房画像より少なくとも2つ取得して、一方の乳房画像における前記基準点Kl,Krと対応点(P1l,P1r),(P2l,P2r)とを他方の乳房画像における前記基準点と対応点とに一致するように一方の乳房画像の乳房領域を変形する。
(もっと読む)
プロジェクタによる位置および向きの読み取り
プロジェクタの位置および向きは、投影された画像から求められる。まず、カメラと平坦な表面の間のホモグラフィを求めることであって、カメラおよび平坦な表面は互いに固定した相対位置にある。次に、既知のパターンは、既知の固有パラメータならびに未知の位置および向きを有するプロジェクタで平坦な表面上に投影される。カメラで既知のパターンの画像は取得され、ホモグラフィおよび固有パラメータを用いて画像からプロジェクタの位置および向きは求められる。 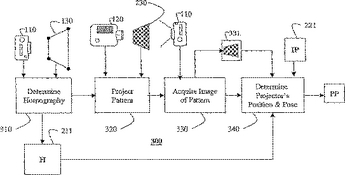 (もっと読む)
(もっと読む)
画像出力装置および撮像装置
【課題】 画像データに含まれる特定画像部分の拡大画像を容易に確認することのできる画像出力装置を提供する。
【解決手段】 画像データに含まれる特定画像部分を検出する検出手段120と、特定画像部分の検出結果に基づいて画像データ内の特定点を決定する決定手段107と、特定点を基準とする特定画像部分の拡大画像を出力する出力手段110とを有する。
(もっと読む)
パラメータ推定装置、パラメータ推定方法、及び、パラメータ推定プログラム
【課題】 ビデオカメラ等を使って手動操作により撮影した画像から外界の物体の空間情報を獲得、復元するときに、それぞれ焦点距離が変化するため、従来の因子分解法を利用することができず、ピント調整のために変化する焦点距離を同時に復元しなければならないという問題を解決する。
【解決手段】 因子分解処理部63で、各画像の特徴点の時間的変化量を示す画像座標値から行列データを作成し、作成した行列データを特異値分解し雑音除去を行って運動情報を表す行列データと3次元情報を表す行列データとを得て、運動情報の成分において運動を規定するために設定した条件を満足する変換行列を求め、運動情報となる行列データにこの変換行列を作用させてカメラ視点運動を復元し、3次元情報を表す行列データにこの変換行列の逆行列を作用させて物体形状を構成する3次元情報を復元し、焦点距離推定部64で焦点距離を推定する。
(もっと読む)
情報処理方法および装置
【課題】 撮像装置の位置および姿勢を算出する段階において、その算出に利用する指標を移動可能とする。
【解決手段】 現実空間に配置された指標の位置または位置および姿勢に関する配置情報を検出する指標配置情報検出工程と、現実空間の撮影画像を取得する撮影画像取得工程と、記撮影画像から指標を検出する指標検出工程と、前記配置情報と前記指標の検出結果とに応じて、前記撮影画像の撮影視点の位置および/または姿勢を算出する算出工程とを有する。
(もっと読む)
デジタル電子透かしを読み出すための方法および装置、コンピュータプログラム製品および相応の記憶手段
本発明は、データセットに含まれる少なくとも1つの電子透かしメッセージを検出するステップ(92)と、場合によっては、該ステップ(92)に先行して、該データセットに施された電子透かし埋め込みチャネルのパラメータの少なくとも1組を検出するステップ(91)とを有し、チャネルパラメータの各組は少なくとも1つのチャネルパラメータを含む形式の方法に関する。少なくとも1つの電子透かし埋め込みメッセージの検出ステップおよび/またはチャネルパラメータの少なくとも1つの組を検出する先行のステップは、以下のことを行う:データセットのデータを含む少なくとも1つのデータバッチを処理してN個の推定エレメントを得て、N≧0である推定フェーズ(71;81)。
該データセットの全体または少なくとも1つのサブセットに関して各推定エレメントを有効化または無効化する確認フェーズ(72;82)。
前記の各推定エレメントは、少なくとも1つの電子透かし埋め込みメッセージを検出するステップでは、推定された電子透かし埋め込みメッセージであり、少なくとも1組のチャネルパラメータを検出する先行のステップでは、推定されたチャネルパラメータの組である。  (もっと読む)
(もっと読む)
画像検査装置、画像検査方法及び画像検査プログラム
【課題】 予め用意したシェーディング特性と、検査対象の画像機器のシェーディング特性が異なる場合、正常な補正ができないため欠陥検出精度が低下したり、誤判定したりする問題があった。
【解決手段】 入力される画像データに基づき検査対象の品質を検査する画像検査装置において実行される欠陥検出方法であって、M行N列(M、Nは自然数)の画素から形成されるデジタル画像を、所定の行数毎に区切り複数の帯状領域に分割する分割ステップと、前記複数の帯状領域においてそれぞれ、前記帯状領域に含まれる各画素の濃淡値の平均を列毎に求める平均ステップと、前記複数の帯状領域においてそれぞれ、列番号と、前記列番号に対応する列における前記濃淡値の平均との関係を近似する近似関数を算出する近似ステップと、前記近似ステップにおいて算出される前記近似関数により導出される前記濃淡値と、前記平均ステップにおいて求められる前記濃淡値の平均との差に基づき、シミの有無を判定する判定ステップとを有することを特徴とする欠陥検出方法を提供する。
(もっと読む)
画像処理装置およびこれを備えるプリンタ、画像処理方法
【課題】 画像を回転して出力する際の画像補正処理をより適切に施す。
【解決手段】 画像ファイルを先頭から順に復元して起点復元用情報やRGB値のヒストグラムを取得すると共に肌色領域などを抽出してデータバッファに記憶し(S100〜S190)、取得した肌色領域の大きさや位置,両目や口に相当する画素領域の存在などに基づいて画像内容が人物画像か風景画像かを判定するオブジェクト認識処理を実行して自動補正処理用のパラメータを計算し(S195,S200)、起点復元用情報を用いて画像ファイルを起点ブロックから復元することにより回転後の画像を上端から順に生成すると共に計算したパラメータに従って自動補正処理を施して出力する(S210〜S300)。この結果、画像内容の判定を回転前の画像を用いて行なうから、より適切に画像内容を判定することができる。
(もっと読む)
3次元サーフェスモデル作成システム、画像処理システム、プログラム及び情報記録媒体
【課題】安価なシステム構成で、室内などのテクスチャー付き3次元サーフェスモデルを構築する。
【解決手段】撮影システム2は、室内などの対象を分割撮影し、画像データ及び点群データを画像処理システム1に入力する。画像処理システム1は、グラフィカル・ユーザ・インターフェースを介した対話型処理により、シーン毎の画像データ及び点群データから対象の局所3次元サーフェスモデルを作成し、複数の局所3次元サーフェスモデルを統合した3次元サーフェスモデルを作成する。対話型処理には、各シーンの画像上で、ユーザが点群を選択することにより、この選択された点群に対応したモデル要素の候補面を作成する処理などが含まれる。
(もっと読む)
対話式ディスプレイ・システムの較正
【課題】 ディスプレイ面上へのユーザの接触の閾値を、容易なやり方で調整する。
【解決手段】 視覚感知システムとプロジェクタのうちの少なくとも一方を、他方およびディスプレイ面に対して位置合わせし、補償済み信号を、ディスプレイ面上に投影された画像を規定するソフトウェア・プログラムに対する入力として採用し、そのために、ソフトウェア・プログラムが、プロジェクタによってディスプレイ面上に投影された画像に対するディスプレイ面上の対象の位置を正確に検出する。
(もっと読む)
撮像装置およびプログラム
【課題】 撮影に要する時間を短縮しつつ、主要被写体を良好に撮影可能な撮像装置および撮像装置に対する制御を行うためのプログラムを提供すること。
【解決手段】 複数の撮影対象を含む被写界を撮像して画像データを生成する撮像部と、複数の撮影対象の少なくとも1つを含む領域を選択する選択部と、撮像部により生成された画像データのうち、選択部により選択された領域において被写体の特定を行う特定部と、特定部により特定された被写体の特徴を示す特徴量を抽出する抽出部と、抽出部により抽出された特徴量が、閾値を超えたか否かを判定する判定部とを備え、撮像部は、判定部により特徴量が閾値を超えたと判定されると撮像を行う。
(もっと読む)
画像系列取得方法、装置及びその方法を実行するプログラム
【課題】 得られた時系列画像から画像系列を取り出してカメラ運動と3次元形状を復元するとき、復元するのに十分な画像系列かどうかを自動的に判断する。
【解決手段】 カメラから取得した画像を時系列画像データベース部11に格納する。次に、そのデータベース部11からあるフレーム間の画像系列を画像系列取得部12で取得する。取り出した画像系列間で特徴点を特徴点抽出部13で抽出し、抽出した特徴点を特徴点追跡処理部14によりフレーム間に亘って追跡する。追跡により得られた画像情報から、カメラ運動の有無をカメラ運動検出部15で検出し、カメラ運動判定部16でカメラ運動と相対的に動く特徴点に惑わされることなく、それ以外の特徴点から、用いるフレーム数がカメラ運動と3次元形状を復元するのに十分かどうかを判定する。
(もっと読む)
画像形成装置、ICタグ、画像形成方法、及びプログラム
【課題】 書籍等の刊行物をコピーする際に、コピー禁止箇所をマスキングして印字(コピー)することで、例えば、商標登録されているキャラクターの絵やロゴマーク等が乱用されるのを防ぐ。
【解決手段】 本発明の画像形成装置においては、書籍1に貼り付けられたICタグ(RFID等)10に、当該書籍1についてのコピー禁止箇所の有無情報と、コピーを禁止する特定パターンに関する情報を記憶させる。そして、画像形成装置に備えたリーダ/ライタ101によりICタグ10に記憶された情報を読み取り、書籍1にコピー禁止箇所があるか否かを判定し、コピー禁止箇所がある場合には、コピー画像とコピー禁止の特定パターンとの間でパターンマッチング処理を行い、特定パターンと一致した箇所をマスキングして印字する。
(もっと読む)
画像合成装置,カメラの手ぶれ補正装置およびカメラ
【課題】 本発明は、画像合成装置,カメラの手ぶれ補正装置およびカメラに関し、第1の画像に対して第2の画像が回転している場合にも第1の画像と第2の画像とを迅速に重ね合わせることができる画像合成装置、および、この画像合成装置を用いたカメラの手ぶれ補正装置およびカメラを提供することを目的とする。
【解決手段】 重複領域を有する第1の画像の画素情報と第2の画像の画素情報とを比較し、前記重複領域のずれ量を求め、前記ずれ量に基づいて前記第1の画像と前記第2の画像の重複領域を重ね合わせる画像合成装置において、判定エリアを、円状または円環状にし、その中心位置を判定エリアの位置としてなることを特徴とする。
(もっと読む)
実装基板の撮像方法、検査方法及び検査装置、並びに実装ライン
【課題】分割して撮像した画像を精度良くつなぎ合わせることができる実装基板の撮像方法を提供する。
【解決手段】本発明の撮像方法は、電子部品Eが実装された実装基板Pを複数の撮像領域Pgに分割するとともに、各撮像領域Pgに撮像手段3を順次移動させて撮像して複数の分割撮像データを得る撮像ステップと、複数の分割撮像データをつなぎ合わせて合成撮像データを得る合成ステップと、合成撮像データにおける撮像領域毎の位置ずれ量に基づいて、撮像手段3の撮像領域Pgに対する撮像位置を補正する補正ステップと、を含む。
(もっと読む)
電子透かし埋め込み装置と方法ならびに電子透かし抽出装置と方法
【課題】 電子透かしの埋め込まれた印刷画像を撮影すると歪みが生じ、電子透かしを正しく検出することが難しくなる。
【解決手段】 撮影部30は、電子透かしが埋め込まれた原画像の周囲にフレームを貼り付けて印刷した画像を撮影する。レンズ歪み補正部32は、撮影画像に生じたレンズ歪みを補正する。特徴点抽出部34は、レンズ歪み補正後の撮影画像のフレーム内に一定間隔で配置された複数の特徴点を抽出する。画像形状・サイズ判定部36は、複数の特徴点の配置にもとづいて、原画像領域の形状と実サイズを判定する。透視歪み補正部38は、原画像領域の形状と実サイズに合った特徴点テンプレートを用いて、撮影画像のフレーム内の各特徴点の位置ずれを検出することにより、原画像領域に生じた透視歪みを補正する。透かし抽出部40は、補正後の原画像領域から透かし情報Xを抽出する。
(もっと読む)
顔面溝の評価方法及び装置
【課題】額の溝部位を再現性良く撮影した上で、溝を簡易に定量的に評価して、治療や化粧の前後で比較検証可能なデータを得る。
【解決手段】顔の全景画像を取得して、顔面の特徴点P、P1、P2、Qを自動認識し、該特徴点に基づいて測定範囲510、520、530、540を自動設定し、設定された測定範囲内で顔面溝の形状を計測する。
(もっと読む)
位相接続方法及びその装置並びに位相接続プログラム
【課題】位相接続時におけるノイズ等の影響によるエラー又はエラーの伝播を起こりにくくし、正確な位相接続処理を行うこと。
【解決手段】複数の位相シフト画像データから位相値データと振幅値データとを求め、振幅値データに対してマスキング処理する閾値を初期閾値t1から終了閾値tnまで変動幅Δt毎に順次低下し、これら閾値の変化毎に、当該各閾値よりマスクされなかった振幅値データの部分を位相接続可能と判断して順次位相接続処理を行うことを繰り返す。
(もっと読む)
筆記面再生方法、筆記面再生装置及び筆記面再生プログラム
【課題】 ホワイトボード等に手書きされた内容を再生する筆記面再生方法、筆記面再生装置及び筆記面再生プログラムを提供すること。
【解決手段】 情報手書き対象物の筆記面に描写又は筆記された前記情報手書き対象物の筆記面のイメージを再生する筆記面再生方法において、情報手書き対象物の第1の範囲を撮影する第1の撮影ステップと、第1の撮影ステップよりも情報手書き対象物に接近して、1以上の第2の範囲を撮影する第2の撮影ステップと、前記第2の範囲と、前記第1の範囲の所定領域との対応を取る対応領域検出ステップと、当該所定領域を第2の範囲の画像を用いて再生する対応領域再生ステップと、を有することを特徴とする。
(もっと読む)
1,421 - 1,440 / 1,510
[ Back to top ]