
Fターム[5B057DC05]の内容
Fターム[5B057DC05]の下位に属するFターム
重心 (501)
始点、終点、屈曲点、分岐点 (396)
Fターム[5B057DC05]に分類される特許
1,481 - 1,500 / 1,510
物体検出装置

【課題】 検出対象となる物体の形状や動きに依存することなく正確に物体の位置を検出する。
【解決手段】 車両20に搭載され、車両20の周囲を撮像するカメラ11と、調査点を中心とし、車両と、実空間における調査点との相対距離に応じて面積が決められた調査領域を画像上に設定し、設定された調査領域を、前記調査点を通過する分割線により2以上の領域に分割し、分割された各領域内の特徴量をそれぞれ算出し、算出したこの特徴量に基づいて、画像上の上部に位置する上部領域に物体が存在し、画像上の下部に位置する下部領域に物体が存在していないと判定した場合に、中心点までの実空間における距離を算出して、物体の位置を求める画像演算処理部13とを備えることで実現する。
(もっと読む)
画像処理装置およびその方法

【課題】 画像に付加されたドットパターンから追跡情報を正確に復元するには、ドットパターンが正しい位置に付加されている必要があるが、装置固有の印刷位置の誤差が存在する。
【解決手段】 CPU 56は、画像形成位置のずれを測定するためのパターンを表す画像信号を画像形成部53に供給し、パターン検出部50により媒体上に形成されたパターンを検出し、演算部52により検出の結果に基づき画像形成位置のずれを算出し、ずれに応じて信号付加処理部54を制御し、追跡情報のドットパターンの付加位置を制御する。
(もっと読む)
三次元顔認識
マッチング、特に顔マッチングのための幾何学体の三次元データを処理するための装置であって、前記幾何学体の三次元トポグラフィデータを得るための三次元スキャナ(12)と、所望により前記データを受け取り又は前記データを三角形分割多様体に形成するためのトライアンギュレータ(14)と、前記三角形分割多様体を前記多様体の点対間の一連の測地線距離に変換するための測地線変換器(20)と、前記一連の測地線距離の低次元ユークリッド表現を形成し、前記幾何学体の湾曲不変量表現を与えるように構成された多次元スケーラ(22)を含むもの。一変形例では、マッチングは前記表現から原理的固有値をとり特徴空間の座標としてプロットすることによって実行される。同じ顔の傾斜した又は異なった表現はマッチングを可能にする特徴空間のクラスタを形成する傾向を有する。装置は好ましくは三角形分割領域の高速マーチング法を使用して測地線距離を得る。  (もっと読む)
(もっと読む)
ステレオ写真解析機
【課題】 ステレオ写真解析機における測量図作成を容易にして測量精度を高める。
【解決手段】 視差を有するステレオカメラで指標を撮影する。解析機は撮影された複数のペア写真を読込む。2組のペア写真をモニタの接続写真表示領域CPD1、CPD2に表示する。自動ボタンATBを押すと指標の画像座標とマークを検出する。対応付けボタンを押すと、同一のマークに基づいて2つの画像における同一の指標の座標を対応付ける。算出開始ボタンPSBを押すと、2つの画像における指標の座標に基づいて、変換パラメータを算出する。変換パラメータを算出した2組のペア写真の測量点の座標を変換パラメータにより変換する。
(もっと読む)
単眼視3次元位置計測装置および方法
【課題】 1台の撮影手段で撮影した一枚の画像情報のみに基づき、高速、かつ、少ない目印点数で3次元位置を計測する装置および方法を実現すること。
【解決手段】 対象物に4つの目印を付し、全ての目印の対について相互間距離を計測し、撮影手段で4つの目印の2次元画像を取得し、その2次元画像内での目印の座標を求め、その座標値に基づき撮影手段が各2つの目印をはさむ見込み角を計算し、3つの目印を選択して形成した3角形について、上記相互間距離と上記見込み角に依存する4次方程式を解いて撮影手段と各目印の間の距離の候補値の組を求め、他の三角形より得られる候補値と整合性がある値を選択して上記距離を定め、3次元位置を決める、単眼視3次元位置計測装置および方法とした。
(もっと読む)
画像処理装置および画像処理方法
【課題】画像中から、ユーザの要求に応じて抽出すべき領域を適応的に変更することができ、ユーザの要求に合った注目領域を抽出することができる画像処理装置を提供する。
【解決手段】画像を取得する画像入力部11と、ユーザから、どのような領域を抽出したいかについて画像の属性に関する指示を、注目領域の抽出の条件として取得する指示入力部12と、指示入力部12が取得した指示に基づいて、画像中から抽出すべき領域を特定する領域特定部13とを備えることを特徴とする。
(もっと読む)
教師データの登録支援装置
【課題】この種のニューラルネットワークを有する欠陥種別判別システムにおいて、誤った教師データを登録することに基づく学習処理時間のロスを回避すること。
【解決手段】入力手段により入力された欠陥種別名の特徴量列とデータベースに登録された複数の欠陥種別名のそれぞれに対応する特徴量列とを、予め各画像的特徴毎に定義された量子化単位にて照合する照合手段と、照合手段による照合の結果、入力された欠陥種別名の特徴量列と一致する登録済特徴量列が存在しないときには、入力された欠陥種別名の特徴量列とその欠陥種別名の特徴量列として既に登録されている特徴量列の平均値との量子化単位における一致度を算出する演算手段と、演算手段により算出された一致度を操作者に提示する提示手段と、を具備する。
(もっと読む)
顔画像の補正
【課題】移動体ハンドヘルド端末を使用する写真及びビデオ会議システムのための改良された手段を提供する。
【解決手段】ハンドヘルド無線通信端末(10)のカメラ(17)により撮像された被写体(A)の画像のオフセット補正の方法であって、第1角度でカメラを被写体に向けるステップと、被写体の前面画像を撮像するステップと、前面画像を基準画像として蓄積するステップと、第1角度よりオフセットした第2角度でカメラを被写体に向けるステップと、被写体のオフセット画像を撮像するステップと、基準画像を使用して、オフセット画像から、第1角度から撮像されたとされる調整された前面画像を生成するステップと、を備える方法。この方法は、典型的にビデオ会議通信に使用され、調整された前面画像を生成する画像処理システムを利用する。
(もっと読む)
端成分データベース構築方法、端成分データベース構築装置及び端成分データベース構築プログラム
【課題】 複数の物質より成る物体の端成分を格納する端成分データベースを構築する。
【解決手段】 端成分抽出部101は、ハイパースペクトル画像151から入力端成分群153を生成する。照合部103は、入力端成分群153のうちスペクトルライブラリ105にも端成分データベース107にも登録されていない端成分群を新規端成分群155として出力する。入力端成分分布画像生成部111は、入力端成分毎に入力端成分分布画像を生成する。新規端成分分布画像選択部113は、入力端成分分布画像のうちの新規端成分に対応するものを新規端成分分布画像として選択する。ユーザは、新規端成分分布画像、ハイパースペクトル画像及び高分解能画像を基に、各新規端成分がどのような物体に対応するかを認識し、各新規端成分毎に、それを端成分データベース107に登録することについての可否を判断し、それを指示する。
(もっと読む)
画像処理装置及びロボット装置ならびに車両誘導装置
【課題】
画像処理装置において、広い範囲にある対象物に対して、屋外や強い照明下においても安定して形状復元する。
【解決手段】
画像処理装置において、画像入力手段1aが時系列的に入力した画像上の特徴的な点の位置関係の変化を第1の計算手段1bが抽出する。位置関係の変化から特徴的な点の三次元位置と画像を捉えた際の視点の位置と方向を第2の計算手段1cが計算する。入力した画像と特徴的な点の三次元位置とから画像に捉えられている物体の三次元形状データを第3の計算手段が計算する。
(もっと読む)
カメラ・ポーズを決定する方法および装置
(例えばコンピュータ・ビジョン・システムで使用される)6つの自由度で特徴付けられるカメラ・ポーズを決定する方法および装置が開示される。一実施形態では、カメラでキャプチャされたイメージが受領され、潜在的ポーズに関する少なくとも2つの制約が、カメラに対するイメージの既知の関係に従って実施され、それによって潜在的ポーズが、残りの2つの自由度に制限される。次いで、少なくとも1つの潜在的ポーズが、その残りの2つの自由度に従って決定される。 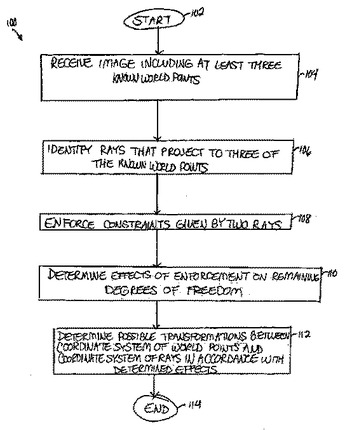 (もっと読む)
(もっと読む)
先行車両水しぶき認識装置
【課題】 前方の車両が水しぶき等を巻き上げて走行していることを確実に認識できる先行車両水しぶき認識装置を提供すること。
【解決手段】 自車の前方の画像を取り込むカメラ4及び画像メモリ2、画像取り込み部31と、画像の輝度分布から減色閾値を設定し、取り込んだ画像を4色の画像に減色する変換処理を行い、減色させた画像の段階的変化から自車前方の車両が水しぶきや、雪煙を巻き上げて走行していることを判断するプロセッサ3を備えた。
(もっと読む)
ビジュアル・オドメトリのための方法および装置
(例えば周囲の環境の中をナビゲートする)ビジュアル・オドメトリのための方法および装置が開示される。一実施形態では、周囲の環境の少なくとも一部を表すシーン・イメージのシーケンスが(例えばビデオ・カメラまたはステレオ・ヘッドから)受領される。シーン・イメージのシーケンスが(例えばビデオ処理技法に従って)処理され、周囲の環境に対するポーズの推定が導出される。この推定は、グローバル・ポジショニング・システム、あるいは慣性センサまたは機械センサなどの他のセンサからのデータでさらに補足することができる。 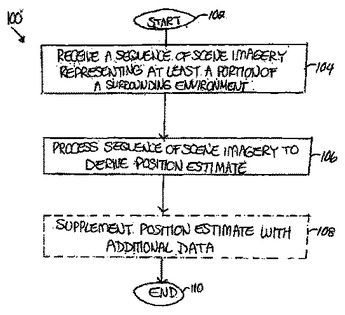 (もっと読む)
(もっと読む)
車両周辺監視装置
【課題】 本発明は、物標以外の物体の影響やノイズの影響を受け難く、良好な物標の認識精度を実現する車両周辺監視装置の提供を目的とする。
【解決手段】 本発明は、車両の所定位置に搭載された撮像手段の撮影画像に対して画像処理を行い、認識対象の静止物体を認識する車両周辺監視装置であって、車両の移動に伴って変化する認識物体の画素位置の移動方向を算出し、該移動方向の算出結果に基づいて、該認識物体が前記認識対象の静止物体であるか否かを判断することを特徴とする。
(もっと読む)
画像処理装置および方法、記録媒体、並びにプログラム
【課題】 位置のずれや変形に関わらず、人の顔を判定できるようにする。
【解決手段】 類似度ベクトル演算部104は、入力された画像から特徴点検出部101と特徴量演算部102により演算された特徴点の特徴量と、読み出し部103により登録部111から読み出された登録画像の特徴量に基づいて類似度を演算する。クラス判定部105は、類似度ベクトル演算部104により演算された類似度ベクトルを、内蔵するサポートベクタマシンに代入し、入力された画像が、人の顔の画像であるのか否か(intra-personal classまたはextra-personal classのいずれのクラスの画像であるのか)を判定する。出力部108は、入力された画像が、人の顔の画像であるのか否かの判定結果を出力する。本発明は、人の顔を識別するロボットに適用することが可能である。
(もっと読む)
画像処理方法および装置並びにプログラム
【課題】MIP処理等の3次元医用画像から投影画像を生成する画像処理において、特定のハードウェアを必要とせず、また、投影画像の画質を実用に耐えうるレベルで維持しつつ、処理の高速化を可能にする。
【解決手段】MIP処理の場合、投影画像を構成する投影画素と視点と3次元医用画像とを通る視線上に複数の探索点を設定する際に、処理対象の探索点において、その視線で処理済の探索点中での最大画素値が更新されたかどうかを評価し、更新された場合には、その探索点とその次の探索点との間のステップ幅を、更新されなかった場合のステップ幅よりも小さくする。これにより、視線に沿った画素値変化の一例を表す図では、最大画素値が更新される可能性が高い実線部分では詳細な探索が行われ(画質レベルの維持)、更新される可能性が低い一点鎖線部分では粗い探索が行われる(処理の高速化)。
(もっと読む)
気管気管支樹を表示する方法及び装置
本発明は、気管気管支樹(400)の自動的セグメント化及び表示、並びにセグメント化された気管気管支樹(400)に関連した医療値の表示に関する。  (もっと読む)
(もっと読む)
画像からの対象物検出方法及び対象物検出装置
画像の質や種類等に影響を受け難いロバストな画像処理方法によって、画像から良好に対象物(好適な例では、細胞)の位置あるいは/および個数を求める。画像から対象物を検出する方法は、着目画素を含む所定領域内の複数の画素の画素値に基づいて算出した該所定領域の特徴値を該着目画素のスコアとし、該画像における各画素についてスコアを算出するステップと、算出されたスコアの大きさ順に画素を選択し、選択された画素1から順に該所定領域と同一あるいは近似の領域を排他的領域2として該画像中に配置するステップと、該配置された一つあるいは複数の排他的領域の少なくとも一部を該対象物として検出するステップとを有する。好ましい態様では、当該画素のスコアが極大である場合に、当該画素を選択して、排他的領域を配置する。好ましい態様では、該特徴値は、該領域内の複数の画素の画素値の平均値である。 (もっと読む)
小型システム用のパノラマメーカーエンジン
パノラマ画像を生成するための方法は、第1画像を受け取る段階と、第1画像を第1部分と第2部分に分割する段階と、第1画像の第1部分を回転させる段階と、第1画像の回転した第1部分を不揮発性メモリに保存する段階と、第2画像を受け取る段階と、第2画像を第3部分と第4部分に分割する段階と、第1画像の第2部分と第2画像の第3部分との間の重複領域を突き合わせる段階と、第1画像の第2部分と第2画像の第3部分を縫合して、第1縫合画像を形成する段階と、第1縫合画像を回転させる段階と、第1縫合画像を不揮発性メモリに保存する段階と、を含んでいる。 (もっと読む)
画像照合システム及び画像照合方法
物体の3次元データを入力する3次元データ入力手段(10)と、少なくとも1つの物体の参照画像を記憶する参照画像記憶部(30)と、物体の姿勢の候補である姿勢候補を生成する姿勢候補決定手段(20)と、姿勢候補に応じて3次元データを2次元の画像に射影しつつ参照画像に近い比較画像を生成する比較画像生成手段(40)と、参照画像と比較画像との距離値及び類似度のいずれか一方に基づいて照合を行う画像照合手段(55)とを備える。これにより、物体の参照画像が姿勢や照明等異なる条件で撮影されている場合にも、高精度に照合や検索ができる。また、物体の3次元物体モデルが予め得られなかったり、参照画像が1枚乃至少数しか存在しない場合にも、高精度に照合や検索ができる。  (もっと読む)
(もっと読む)
1,481 - 1,500 / 1,510
[ Back to top ]