
Fターム[5B057DC08]の内容
Fターム[5B057DC08]に分類される特許
101 - 120 / 2,433
被写体追跡装置及びその制御方法
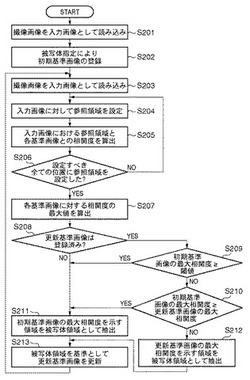
【課題】 基準画像と入力画像との相関度に基づく被写体追跡を行う被写体追跡装置において、被写体の見えが変化する状況における被写体追跡の精度を向上させる。
【解決手段】 入力画像中の領域のうち、登録された第1および第2の基準画像の各々と最大相関度を有する領域を求める。そして第1の基準画像についての最大相関度と第2の基準画像についての最大相関度とを比較して、特定の被写体の領域を最大相関度を有する領域の中から判定する。そして、特定の被写体の領域を判定すると、判定した特定の被写体の領域に基づいて第2の基準画像を更新する一方、第1の基準画像は、更新しない。
(もっと読む)
超音波診断装置

【課題】ユーザ操作の負担を軽減しつつ胎児に対して適切な視線方向を設定する。
【解決手段】羊水領域抽出部30は、受信信号に基づいて形成される三次元空間のボリュームデータ内において、羊水に対応した複数の羊水領域を抽出する。基準羊水特定部40は、各羊水領域の大きさに基づいて複数の羊水領域の中から視線の基準となる基準羊水領域を特定する。視線方向設定部50は、特定された基準羊水領域を通り胎児に向かうように視線方向を設定する。表示画像形成部60は、設定された視線方向に沿って胎児を映し出した三次元表示画像の画像データを形成する。これにより、視線方向を設定するためのユーザ操作の負担を格段に軽減しつつ、胎盤などにより隠されること無く胎児の顔などを極めて明瞭に映し出すことが可能になる。
(もっと読む)
プレゼンテーションシステム、プレゼンテーション装置およびプログラム
【課題】プレゼンテーションの開始前におけるジェスチャーの誤検出を回避することが可能なプレゼンテーションシステムおよびそれに関連する技術を提供する。
【解決手段】プレゼンテーションシステム100は、操作入力受付部とジェスチャー検出部と配信動作制御部とを備える。操作入力受付部は、プレゼンテーションの開始指示を受け付ける。ジェスチャー検出部は、当該開始指示に応答して、プレゼンテーションの発表者PTのジェスチャーの検出を開始する。配信動作制御部は、ジェスチャーの検出内容に基づいて、プレゼンテーションの発表資料の配信動作を制御する。
(もっと読む)
位置検出装置、位置検出方法及びコンピュータプログラム
【課題】検出対象の位置を精度良く検出する位置検出装置を提供する。
【解決手段】所定の位置で所定の向きに設置された撮像装置によって撮像された第一の画像から、検出対象に含まれる第一特徴点eye_2l及び第二特徴点eye_2rの平面座標の位置を検出し、第一特徴点及び第二特徴点の空間座標の位置を取得し、第一特徴点と第二特徴点との間の平面座標における距離と空間座標における距離との比を算出し、撮像装置によって撮像された第二の画像から、検出対象に含まれる第一特徴点及び第二特徴点の平面座標の位置を検出し、距離比と、第二の画像における第一特徴点及び第二特徴点の平面座標と、に基づいて第一特徴点及び第二特徴点の空間座標の位置を検出する。
(もっと読む)
人体動作周期の特定と人体動作の認識の方法、装置、及びプログラム
【課題】
ビデオにおける人体動作周期を特定し、人体動作を特定すること。
【解決手段】
本発明は、人体動作周期を特定し、及び人体動作を認識する方法及び装置を提供する。前記ビデオにおける人体動作周期を特定する方法は、探索範囲内の各フレームの人体領域を複数の人体部分に区分する処理と、現在のフレームにおける各人体部分の局所動作周期を特定する処理と、前記局所動作周期に基づいて現在のフレームにおける人体動作周期を特定する処理とを含む。異なる動作や異なる個体に対して適応して人体動作周期を特定することによって、時間的・空間的特徴をより正確に抽出することができ、より正確な人体動作認識を実現することができる。
(もっと読む)
三次元形状計測装置及び三次元形状計測方法
【課題】カメラ、レーザの相対位置を高精度で設置する必要がなく、また、測定レンジを複数種類を単一の測定プログラムにより変更する。
【解決手段】レーザ線条光照射部12と、既知形状の基準模様群を表示面に表示した座標変換テーブル作成用印刷表示板16と、照射部位の光切断面及びレーザ照射平面上に設置される表示板16を撮影するカメラ11と、表示板16の基準模様群を撮影したカメラ上の座標データを抽出する基準座標抽出手段131とから基準模様群の座標データと基準座標抽出手段131で抽出されたカメラ上の座標データとの対応関係を示す座標変換テーブル133を作成する。形状測定時には、表示板16を外して同じ位置に被測定物を配置させ、レーザ線条光を照射して照射部位の光切断面を撮影した画像から、点群抽出手段134により光切断面の点群を抽出する。抽出した点群座標を近似処理手段135により座標変換テーブル上の値に近似する。
(もっと読む)
人体動作の認識の方法、装置、及びプログラム
【課題】
異なる動作や異なる個体に対応する人体動作周期及び人体動作を特定すること。
【解決手段】
本発明は人体動作周期を特定し、及び人体動作を認識する方法並びに装置を開示する。ビデオにおける人体動作周期を特定する方法は、所定の探索範囲内において人体姿勢が現在のフレームと類似するフレームを探索し、探索範囲内において人体姿勢が現在のフレームと類似するフレームを探索できた場合に、現在のフレームと前記人体姿勢が現在のフレームと類似するフレームとの間の時間長さをビデオにおける人体動作周期とすることを含む。異なる動作や異なる個体に対して、相応する人体動作周期を特定することによって、時間的・空間的特徴をより正確に抽出し、より正確な人体動作の認識を実現することができる。
(もっと読む)
画像処理装置、撮像装置、画像処理方法、画像処理プログラム
【課題】人物のオリジナルの表情を生かしながら、その人物の感情を豊かに反映した画像を生成すること。
【解決手段】本発明の画像処理方法は、画像上で人物以外の領域の中から加工対象領域を選定する選定手順(S184)と、前記人物の表情を表す表情データと、前記加工対象領域の種別とに基づき、前記加工対象領域に適した加工処理の内容を判定する判定手順(S185〜S187)と、前記判定手順で判定した内容の加工処理を前記加工対象領域に対して施す処理手順(S188)とを含む。
(もっと読む)
ロボット制御システム、ロボットシステム及びマーカー処理方法
【課題】 ロボットの操作対象物に設定された第1のマーカーに基づいて、操作対象物の位置情報を特定できるロボット制御システム等の提供。
【解決手段】 ロボット制御システム10は、撮像部20から得られる画像情報に基づいて画像処理を行う処理部110と、処理部110の処理結果に基づいてロボット30の制御を行う制御部120と、を含む。処理部110は、ロボット30の操作対象物に設定された第1のマーカーに設定された画像構成要素が、N回対称性を有する場合に、画像情報に基づいて、第1のマーカーの認識処理を行い、操作対象物のN個の候補位置情報を求め、操作対象物の認識処理の結果に基づいて、N個の候補位置情報の中から操作対象物の位置情報を特定する。制御部120は、操作対象物の位置情報に応じてロボット30を制御する。
(もっと読む)
対象物把持装置、対象物把持装置の制御方法、およびプログラム
【課題】対象物の姿勢を推定して把持を行う処理を高速化すると共に、把持動作の失敗確率を低減する。
【解決手段】対象物の姿勢を姿勢推定パラメータに基づいて推定する推定部と、推定部により推定された対象物の姿勢に基づいて対象物を把持する把持部と、把持部による把持の失敗を検知する検知部と、検知部により把持の失敗が検知された際の対象物の姿勢に基づいて姿勢推定パラメータを修正する修正部と、を備える。
(もっと読む)
画像処理装置、画像処理システム、画像処理方法、及び記憶媒体
【課題】階調変換等の画像処理に用いる特徴量を抽出する領域(注目領域)を安定して適切に抽出する構成とすることで、良好な処理後画像を提供できる画像読取装置を提供する。
【解決手段】領域抽出手段112において、輪郭取得手段113は、第2の領域(す抜け領域)を抽出し、その第2の領域(す抜け領域)から当該第2の領域(す抜け領域)でない領域との境界を被写体の輪郭線として抽出する。解析手段114は、輪郭取得手段113により抽出された輪郭線の曲率等を解析する。この解析結果に基づいて、第1の領域(注目領域)を抽出する。
(もっと読む)
撮像システムおよびその制御方法
【課題】別々に撮像された複数の部分画像を合成することにより広画角な全体画像を取得する撮像システムにおいて、つなぎ目部分が不自然でない高品質な全体画像を簡易な処理で生成可能とする。
【解決手段】撮像システムが、被写体の撮像範囲を複数の小区画に分割して撮像する撮像手段と、前記撮像手段で撮像された各小区画の部分画像を合成して全体画像を生成する画像処理手段と、前記撮像手段で被写体を撮像する前に、その被写体上の複数の点を計測し計測データを取得する計測手段と、前記計測手段で取得された各計測点の計測データに基づいて、計測データの値の空間的な変化がより小さい位置に小区画の境界が配置されるように、当該被写体の分割位置を調整する分割位置調整手段と、を備える。前記撮像手段は、前記分割位置調整手段により調整された分割位置に従って各小区画の撮像を行う。
(もっと読む)
ロボット制御システム、ロボットシステム及びマーカー処理方法
【課題】 操作対象物に設定された第1のマーカーの面積重心に基づき、マーカー向き情報を特定できるロボット制御システム等の提供。
【解決手段】 ロボット制御システム10は、撮像部20から得られる画像情報に基づいて画像処理を行う処理部110と、処理部110の処理結果に基づいてロボット30の制御を行う制御部120と、を含む。そして、処理部110は、画像情報に基づいて、ロボット30の操作対象物に設定された第1のマーカーの認識処理を行い、第1のマーカーの認識処理の結果に基づいて、第1のマーカーに設定された第1の画像構成要素の面積重心を求め、面積重心に基づいて、第1のマーカーが示す向きを表すマーカー向き情報を求める。さらに、制御部120は、マーカー向き情報に応じてロボット30を制御する。
(もっと読む)
追尾装置及び追尾方法
【課題】顔部が非検出となったり、顔部の検出の精度が低下したりした場合であっても、以後のフレームにおける追尾精度を落とすことの無い追尾装置及び追尾方法を提供すること。
【解決手段】追尾対象の顔部を、顔検出回路1307を用いた追尾処理と、追尾処理回路1305による輝度情報を用いた追尾処理と、追尾処理回路1306による色情報を用いた追尾処理とによって追尾する。また、追尾対象の顔周辺部を、顔検出回路1307を用いた追尾処理によって検出された顔部の位置から推定して追尾するとともに、追尾処理回路1305による輝度情報を用いた追尾処理と、追尾処理回路1306による色情報を用いた追尾処理とによって追尾する。次フレームの追尾処理の開始の位置を顔検出回路1307における顔検出の結果と顔部信頼性向き判定回路1308における顔部の向きの判定結果に応じて変更する。
(もっと読む)
歩行者認識装置
【課題】認識条件の決定精度の向上と共に、計算時間の短縮を実現することができる歩行者認識装置を提供することを課題とする。
【解決手段】本実施形態によれば、時系列の環境データに基づいて、自車両周辺の交通環境を認識し、当該認識した当該交通環境に関するデータに基づいて、歩行者認識で用いる学習済み識別器または歩行者認識用テンプレートを選択し、時系列の環境データおよび選択された学習済み識別器または歩行者認識用テンプレートに基づいて、歩行者の認識を行う。
(もっと読む)
情報処理装置
【課題】人体の動きに応じて情報処理装置を操作するときの操作性を改善する。
【解決手段】カメラ18は、操作者の人体の少なくとも一部の画像を取得し、取得した画像の画像データを生成する。第1特徴領域情報生成部122Aは、画像データから、人体の特徴部位を含む第1特徴領域を検出し、第1特徴領域を定義する第1特徴領域情報を生成する。第2特徴領域検出部122Bは、第1特徴領域情報に基づいて、仮想空間において、第1特徴領域に対応する第2特徴領域を定義する第2特徴領域情報を生成する。複数の操作コマンド生成部124Bは、仮想空間内の複数の部分空間に対応した操作コマンドを生成する。選択部124Aは、第2特徴領域情報に基づき、複数の操作コマンド生成部124Bの中から1つを選択する。
(もっと読む)
画像入力装置、会議装置、画像処理制御プログラム、記録媒体
【課題】カメラの高さの変化を含んだ任意の位置での画像処理が可能な画像入力装置を提供すること。
【解決手段】被写体を撮影するカメラ本体77と、被設置面に設置される筐体2と、カメラ本体77をチルト可能に支持させると共に、筐体2に上下方向へ揺動可能に支持されたアーム部71と、第1及び第2の加速度センサS1、S2を備えアーム部71とカメラ本体77の傾きを検出させる傾き検出部Sと、傾き検出部Sが検出した傾きと当該装置の寸法情報とに基づいて、被設置面からカメラ本体77までの高さ高さ距離情報Lを算出し、その算出した高さ距離と傾き検出部Sが検出したカメラ本体77の傾きとからカメラ本体77が撮影する被写体の種類を特定し、その特定した種類の被写体に適した画像処理を実行する制御部を備えて画像入力装置を構成する。
(もっと読む)
三次元地図作成装置およびその窓領域検出装置
【課題】高層ビルを含む全てのビルを映し出すことの可能な鳥瞰画像に基づいて、建物の窓領域を自動的に抽出する三次元地図作成装置およびその窓領域検出装置を提供する。
【解決手段】本発明の窓領域検出装置は、注目ビルの鳥瞰画像から、画像特徴量が類似して周期的に検出される複数の窓領域候補を検出する窓領域候補検出部104と、複数の窓領域候補を、その特徴量および位置情報に基づいて複数のクラスタに分類するクラスタリング部105と、クラスタリングの結果に基づいて、注目ビルの窓パターンを分類する窓パターン分類部107と、窓パターンに応じたエッジ情報に基づいて注目ビルの消失点を算出する消失点算出部107と、消失点の算出結果に基づいて注目ビルの鳥瞰画像を正面化する正面化部109と、正面化された注目ビルの鳥瞰画像に、窓パターンに応じて欠損窓を補完する欠損窓補完部110とを具備した。
(もっと読む)
3次元計測装置およびその方法
【課題】計測装置が揺動する状況下であっても、計測対象の3次元形状を好適に計測することができる3次元計測装置を提供する。
【解決手段】撮像装置12により撮像された画像データを含む撮像情報を取得する撮像部11と、撮像情報に基づいて計測対象の3次元座標を取得する3次元形状演算処理部23と、撮像装置12の加速度および姿勢角度を含む位置姿勢情報を撮像情報の取得と同期して取得する位置姿勢計測部14と、位置姿勢情報に基づいて計測原点に対する撮像装置12の移動量・方向と姿勢角度の変化量・方向とを演算する位置姿勢補正処理部17と、撮像情報と同期して取得された撮像装置12の移動量および方向と姿勢角度の変化量および方向とに基づいて3次元形状演算処理部23により得られる3次元座標を平行移動および回転して複数の3次元座標を統合し、計測対象の3次元形状を取得する統合演算処理部24とを備えた。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】処理時間を低減することができる画像処理装置、画像処理方法、およびプログラムを提供する。
【解決手段】モニタ22は、計測対象物の画像と、計測対象物に対応する物体であって予め算出された3次元形状を有する物体の画像とを表示する。CPU34cは、リモコン23を介して入力される指示に基づいて、計測対象物の画像上の第1の点と物体の画像上の第2の点とを指定する。CPU34cは、第1の点を基準とする第1の図形と、第2の点を基準とする第2の図形との幾何学計算を行い、幾何学計算の結果に基づいて、計測対象物の画像と物体の画像との少なくとも一方の姿勢または位置を調整する。CPU34cは、姿勢または位置が調整された後、リモコン23を介して入力される指示に基づいて指定された計測位置に対応する物体上の空間座標を算出し、算出した空間座標に基づいて、物体のサイズを算出する。
(もっと読む)
101 - 120 / 2,433
[ Back to top ]