
Fターム[5B057DC08]の内容
Fターム[5B057DC08]に分類される特許
21 - 40 / 2,433
画像処理装置および画像処理方法
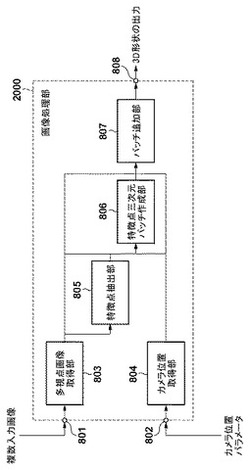
【課題】三次元空間にある被写体の表面形状を曲面パッチを用いて推定することで、特に曲面部分についての推定精度を向上させる。
【解決手段】被写体の多視点画像とそのカメラ位置情報を入力し、特徴点抽出部805で各画像における特徴点を抽出する。そして、特徴点三次元パッチ作成部806で、各画像の特徴点に対応する、曲面からなる特徴点三次元パッチを作成し、さらにパッチ追加部807で、特徴点三次元パッチ周辺に、曲面からなる追加三次元パッチを作成する。
(もっと読む)
棒状ワーク撮像装置および棒状ワークの先端同心判定装置

【課題】測定時間を短縮できると共に、高い精度で棒状ワークを管理できる棒状ワーク撮像装置および棒状ワークの先端同心判定装置を提供する。
【解決手段】鏡筒13にビームスプリッター42、43を設け、対物レンズ41からの像光を3つの光路P1〜P3に分光し、各光路P1〜P3の像光を拡大して、カメラ14、15、16で撮像する。ビームスプリッター42、43の光軸の中心位置をずらすことで、鏡筒13に連なるカメラ14で先端加工部21を撮像し、カメラ15で本体ストレート部23の一方の輪郭を撮像し、カメラ16で本体ストレート部23の他方の輪郭を撮像する。これらカメラ14、15、16の撮像信号を解析し、先端加工部21の軸心の位置と本体ストレート部23の軸心の位置とが合致するかどうかにより、棒状ワーク10の良否を判定する。
(もっと読む)
車両用周辺監視装置
【課題】運転者が車両後方を主体とした周辺の状況を直感的に把握できる自然な画像を出力することが可能な車両用周辺監視装置の提供。
【解決手段】車両用周辺監視装置は、処理装置を含み、処理装置は、現時点の自車位置より所定距離後方に位置するカメラにより撮像した画像に基づいて、自車の前進走行中に、自車に搭載される表示装置に、自車後方から前方に自車を視た画像又は映像(自車後方前向き画像)を出力することを特徴とする。
(もっと読む)
画像処理装置、画像処理方法及びコンピュータプログラム
【課題】複数の人物が動きのあるポーズをとる場合でも、撮影した画像にて人物の顔を小顔に見せる加工処理を有効に行なうことができる画像処理装置、画像処理方法及びコンピュータプログラムを提供する。
【解決手段】画像から検出される顔を加工するに際し、検出された各顔について、処理輪郭線が、他の処理輪郭線と交差するか否かを判断し(S73)、処理輪郭線が他の処理輪郭線と交差する場合は(S73:YES)、加工処理の対象から除外する(S75)。これにより、加工により輪郭付近に歪みを生じさせない。
(もっと読む)
車外環境認識装置および車外環境認識方法
【課題】人の下部領域(下半身)を通じて人を直接特定することで、人の特定効率および特定精度の向上を図る。
【解決手段】車外環境認識装置130は、検出領域内の画像を取得し、取得した画像において道路表面に相当する平面から予め定められた高さまでの領域にある複数のブロックを、ブロック同士の第1の相対関係に基づいてグループ化し、ブロック群を生成し、ブロック群を画像の水平方向に対して2分割し、2分割したブロック群同士の第2の相対関係に基づいて、ブロック群が人の候補である第1人候補であるか否か判定する。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム
【課題】様々な位置姿勢や形状のワークに対応可能で、かつ、迅速に最大内接円を抽出可能な画像処理装置、画像処理方法及び画像処理プログラムを提供すること。
【解決手段】撮像部2によりワークWが撮像された元画像を取得する元画像抽出部31と、元画像抽出部31により取得された元画像を2値化して、元画像からワークWの概略領域を特定する領域特定部32と、領域特定部32手段により特定された概略領域を所定回数収縮処理する収縮処理部34と、元画像抽出部31により取得された元画像からワークWの輪郭線を抽出する輪郭線抽出部35と、輪郭線抽出部35により抽出されたワークWの輪郭線と収縮処理部34により収縮処理された収縮領域とを合成し、収縮領域の領域内で輪郭線に内接する最大内接円の中心点を探索して、中心点を中心としたワークWの内接円を抽出する最大内接円選定部36と、を備えた。
(もっと読む)
電子情報提供システム及び電子情報提供方法
【課題】人物を撮像した画像から該人物の属性を判定して情報を選択し、選択した情報を該人物によって閲覧されるように表示する。
【解決手段】人物を含む画像を撮像するカメラと、このカメラによって撮像された人物が移動する方向かつカメラから離れた位置に設置された情報表示装置と、カメラで撮像された画像を用いて人物の属性を判定して該属性に基づいて情報を選択すると共に、この人物が情報表示装置に到達する前に、選択した情報を情報表示装置に表示するよう制御する制御装置とによって電子情報提供システムを構成する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】運動の有効性に関するフィードバックを目に見える形でユーザに呈示することのできる仕組みを提供すること。
【解決手段】入力画像に映る人物の運動を認識する認識部と、前記認識部により認識される前記運動の有効性に応じて異なる仮想オブジェクトを前記入力画像に重畳する表示制御部と、を備える画像処理装置を提供する。前記画像処理装置は、前記認識部により認識される前記運動の有効性を示すスコアを算出するスコア算出部、をさらに備えてもよく、前記表示制御部は、前記スコア算出部により算出される前記スコアの大きさを表現する前記仮想オブジェクトを前記入力画像に重畳してもよい。
(もっと読む)
情報処理装置、及び、情報処理方法
【課題】効率的に動領域抽出処理を行う動領域抽出プロセッサを提供する。
【解決手段】 動領域抽出プロセッサ5は、領域毎のアフィン動きモデルを推定する動きモデル推定処理と、領域を表すラベルを画素に割り当てる領域ラベリング処理との間の連携を強化し、境界更新処理と新領域検出処理の択一化により画素単位のパイプライン処理を実現し、要素処理(輝度勾配の算出など)の共通化と簡単化を行うことによって、比較例と比較して、アーキテクチャの50%削減、及び、4.2倍のスループットを実現している。
(もっと読む)
物品の3次元位置姿勢の認識装置及び認識方法
【課題】製造現場で使われる汎用的な組み込み装置でも実施できるような、少ない計算コストで物品の3次元位置姿勢を認識できる認識装置及び認識方法の提供。
【解決手段】カメラ20で複数の物品22がバラ積みされた領域全体の2次元画像を取得し、レンジセンサ18でカメラ20と略同じ領域の3次元情報を取得する。取得した3次元情報から、取り出すべき物品が存在するであろう空間を対象空間として大まかに限定し、該対象空間に基づいて2次元画像処理で物品を探索するための探索条件を設定し、該探索条件に基づいて物品の画像上での2次元位置情報を取得する。次に該2次元位置情報を用いて、物品の3次元位置姿勢の認識に使用する3次元点データを選定し、カメラ20の焦点から該物品に向かう3次元空間上の視線を計算し、該3次元点データと視線とに基づいて物品の3次元の位置姿勢を計算する。
(もっと読む)
注視位置推定システム、注視位置推定システムの制御方法、注視位置推定装置、注視位置推定装置の制御方法、プログラム、及び情報記憶媒体
【課題】虹彩中心位置を検出したり、眼球中心の投影位置を推定したりすることなく、ユーザの注視位置を推定することが可能な注視位置推定システムを提供すること。
【解決手段】撮影部17は、表示手段に表示される画面を見るユーザの顔を撮影する。領域検出部32は、ユーザの顔領域と、ユーザの目以外の所定部位領域と、の少なくとも一方と、ユーザの目領域と、を撮影部17の撮影画像から検出する。面積/位置情報取得部60は、目領域の面積情報及び位置情報と、顔領域と所定部位領域との少なくとも一方の面積情報及び位置情報と、を取得する。注視位置推定部62は、面積/位置情報取得部60によって取得された面積情報及び位置情報に基づいて、ユーザが注視している画面内の位置を推定する。
(もっと読む)
不動産物件情報提供支援装置
【課題】ゲスト及びホストの音声に基づき、ゲストに提供しようとする不動産物件情報をより正確に検索できるようにする。
【解決手段】H/G判別部41は、異なる位置に着座するホストとゲストの音声を、集音方向を調整自在な指向性マイク22〜25による検出音の強度に基づき識別する。キーワードテーブル45には、質問キーワードと1つ以上の質問キーワードで分類される質問の種類毎の回答キーワードとが登録されている。キーワード判別部44は、識別されたホストの音声に、登録された質問キーワードのどれが含まれているか及び該質問キーワードに基づく質問の種類を判別し、識別されたゲストの音声に、直近の質問の種類に対応した、登録された回答キーワードのどれが含まれているかを判別し、判別した回答キーワードを該質問の種類と対応させて検索用キーワード記憶部46に記憶させる。
(もっと読む)
エッジの検出と強調を行うイメージ処理の方法および装置
【課題】イメージ内のピクセルがスムージング・アルゴリズムを適用するべき均質な組織を表しているか否かを決定するための技術を提供する。
【解決手段】超音波イメージの複数のピクセルのうちの少なくとも1つに対してエッジ検出フィルタを適用し、大きさを含むエッジ検出値を算出し、エッジ検出値の大きさがスレッショルド値よりも大きい場合に、複数のピクセルの少なくとも1つに対して、方向性エッジ強調フィルタを適用し、エッジ検出値の大きさがスレッショルド値よりも小さい場合に、当該大きさに基づいて、複数の非方向性スムージング・フィルタの中から1つの非方向性スムージング・フィルタを選択し、前記複数のピクセルの少なくとも1つに対して、選択された非方向性スムージング・フィルタを適用する。
(もっと読む)
メイクアップシミュレーションシステム
【課題】動画像に含まれるユーザの顔を少ない処理負担で正確にメイクアップできるメイクアップシミュレーションシステムを提供することを目的とする。
【解決手段】メイクアップシミュレーションシステムであって、撮影した動画像を出力する撮影手段2と、出力された動画像を画像処理して出力する制御手段8と、制御手段8から出力された動画像を表示する表示手段7とを備え、制御手段8は動画像からユーザの顔を所定のトラッキングポイントに基づいて認識する顔認識処理手段と、トラッキングポイントに基づいて動画像に含まれるユーザの顔に所定のメイクアップを施して表示手段に出力するメイクアップ処理手段とを備えることにより上記課題を解決する。
(もっと読む)
画像処理装置および画像処理方法
【課題】光沢が含まれる画像部分が形状生成に用いられず有効利用されない。
【解決手段】多視点で撮影した画像データから多視点画像間での対応領域を検出して被写体の三次元形状データを生成する。そして、対応領域のうち光沢のある光沢画像領域を示す光沢領域データを生成して、多視点画像データの光源の特性データを生成する。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】計測精度を向上させることができる画像処理装置、画像処理方法、およびプログラムを提供する。
【解決手段】モニタ22は、計測対象物の画像と、計測対象物に対応する物体であって予め算出された3次元形状を有する物体の画像とを表示する。CPU34cは、計測対象物を撮像したカメラの姿勢と、物体を撮像した仮想的なカメラの姿勢とが近づくように、計測対象物の画像と物体の画像との少なくとも一方の姿勢を調整する。また、CPU34cは、これら2種類のカメラの光学系または撮像素子の特性が互いに近づくように、計測対象物の画像と物体の画像との少なくとも一方の姿勢を調整する。CPU34cは、これらの調整を行った後、リモコン23を介して入力される指示に基づいて指定された計測位置に対応する物体上の空間座標を算出し、算出した空間座標に基づいて、物体のサイズを算出する。
(もっと読む)
カメラ姿勢算出装置
【課題】複数台の監視カメラの監視空間が什器等が設置された建物内、或いは建物内の廊下などの場合、各カメラの姿勢を校正する基準物体を設置するスペースを確保できない。
【解決手段】自己及び相互の鉛直下を撮像可能に設置された2台のカメラ2a,2bのそれぞれの鉛直下にマーカー7a,7bを配置する。視線方向算出部30は、例えば、カメラ2aについて当該カメラで撮像した画像における自己マーカー7a及び他方カメラ鉛直下の相手マーカー7bの位置座標を用いて当該カメラから各マーカーへの視線方向を算出する。姿勢算出部31は、自己マーカーへの視線方向から得られる鉛直方向と、相手マーカーへの視線方向から得られるカメラ2a,2b間の方位とを用いて世界座標系における各カメラの姿勢を算出する。
(もっと読む)
距離推定装置
【課題】自車から障害物までの距離推定の精度向上を図る。
【解決手段】ビデオカメラ11で捕えた画像より建物等の障害物の法線ベクトルを垂直成分抽出部13で抽出し、抽出された法線ベクトルに基づき、傾斜路判定部15で傾斜路かの判定と傾斜路の場合の傾斜角を算出する。予めカメラ11で捕えた画像から基準法線ベクトルを抽出するとともに、画像の画素毎と自車との距離データをメモリ10に保存しておく。自車と障害物まで平坦路と傾斜路があった場合に、平坦路と傾斜路の境界と障害物までの距離を傾斜角に基づき補正するようにして自車から障害物までの距離推定の精度を向上した。
(もっと読む)
車両周辺監視装置
【課題】歩行者と動物に対する接触可能性の注意レベルが同等である場合に、デフォルトでは歩行者を優先して警報対象にするが、状況に応じて動物を警報対象にする車両周辺監視装置を提供する。
【解決手段】自車両の周辺環境状況として、赤外線カメラにより撮像されたグレースケール画像202Aを構成する画素値の分散値を算出する分散値算出部で算出された前記画像の分散値が閾値分散値以下である場合、自車両の走行中の道路Rdが、市街地の道路ではなく、田舎道、又は山道等であるとみなし、歩行者が飛び出してくる可能性より動物が飛び出してくる可能性が高いと推定して、同等の注意レベルを有する歩行者候補62と動物候補162に対する警報対象の設定を歩行者候補62から動物候補162に変更する。
(もっと読む)
車両周辺監視装置
【課題】単一の撮像装置で撮像した場合であっても、カーブミラーを歩行者と誤検知する可能性を軽減することができる車両周辺監視装置を提供する。
【解決手段】カーブミラー判定部104は、撮像画像から略円形の物体又は略四角形の物体をカーブミラー可能性物体、すなわち人体の頭部候補及びミラー本体候補として抽出するカーブミラー可能性物体抽出部104aと、抽出された前記カーブミラー可能性物体の近傍に支柱形状の物体の有無を検知する支柱形状物体検知部104bと、を有し、抽出された前記カーブミラー可能性物体の近傍に前記支柱形状の物体が検知された場合、前記カーブミラー可能性物体を前記カーブミラーであると決定する。
(もっと読む)
21 - 40 / 2,433
[ Back to top ]