
Fターム[5C054CF06]の内容
閉回路テレビジョンシステム (47,623) | 撮像装置の支持、駆動機構 (923) | 駆動機構 (814) | 角度機構 (415)
Fターム[5C054CF06]に分類される特許
141 - 160 / 415
船舶監視システム
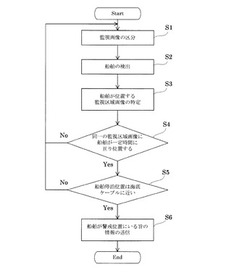
【課題】海底ケーブルに影響を及ぼしうる停泊中の船舶を監視することができる船舶監視システムを提供する。
【解決手段】ケーブルが敷設された海域を撮像したものである監視画像から海面部分を検出し、海面部分を複数の監視区域画像に区分し(ステップS1)、監視画像から船舶を検出し(ステップS2)、船舶が位置する監視区域画像を特定し(ステップS3)、同一の監視区域画像に船舶が一定時間に亘り位置するときに当該船舶は停泊していると判定し(ステップS4)、ケーブルの敷設位置に対応する監視区域画像から所定の距離内に停泊していると判定された船舶があるときに当該船舶は警戒位置にあると判定し(ステップS5)、船舶が警戒位置にあることを出力する。
(もっと読む)
リモートワイヤレスモニタリングシステム

【課題】モニタされる対象物を制御できるモニタリングシステムを提供する。
【解決手段】リモートワイヤレスモニタリングシステムは、移動ターミナル20及びモニタリング装置40を備える。移動ターミナルは、コマンドを受け取る入力ユニット22、コマンドに応答してコントロール信号を発生するコントロールユニット24、コントロール信号を送出する第1ワイヤレス通信ユニット26を含む。モニタリング装置は、移動ターミナルとモニタリング装置の間でワイヤレス信号を送信する第2ワイヤレス通信ユニット46、映像捕捉ユニット48、リモートコントロールユニット42、映像捕捉及びリモートコントロールユニットの方向を変える駆動ユニット50、映像捕捉及びリモートコントロールユニットを対象物に向けるように駆動ユニットを制御するスレーブコントロールユニット44を含む。
(もっと読む)
映像信号処理装置及び映像信号処理方法
【課題】マルチビュア表示された画面上で、制御対象カメラの撮影映像表示領域を分かりやすく区別して表示する。
【解決手段】動作を制御可能な撮像装置から出力される映像信号又は、動作を制御できない装置から出力される映像信号が入力される複数の入力部10を備える。また、複数の映像信号の中から、主出力又は準備出力する映像信号や、制御可能な撮像装置から入力される映像信号を選択する入力選択部20を備えた。そして、入力選択部20で選択された各映像信号を、複数の領域のうちの対象領域に割り振る。このとき、主出力映像を表示する領域用の枠を第1の色で生成し、準備出力映像を表示する領域用の枠を第2の色で生成する。制御可能な撮像装置からの入力映像を示す識別子は、第3の色で生成する。そして、処理が施された各映像信号及び枠又は識別子を、画面上の各領域に出力するようにした。
(もっと読む)
監視カメラシステム
【課題】複数の事象が重なって生じても重要な映像の表示や書き込み記録を自動的に行う。
【解決手段】複数の監視カメラ1−1〜1−nと、映像情報を書き込み記憶する映像記録装置3と、映像を表示する映像表示装置6と、複数の事象に対して、事象情報と当該事象の発生程度に応じたレベル情報と前記複数の監視カメラに対する重み情報とが対応付けられて記憶されたメモリテーブルと、報知される事象情報とそのレベルと前記メモリテーブルの情報とを用いて前記複数の監視カメラの優先度情報を算出する算出手段と、算出された各監視カメラの優先度情報に基づき、映像情報を前記映像記録装置3に書き込み記録する制御と共に、映像を前記映像表示装置6に表示する制御を行う制御手段とを具備する。
(もっと読む)
特徴判定機能を備えたビデオカメラシステム
【課題】所定の特徴を有する被写体画像あるいは所定の特徴を有さない被写体画像のみを簡単なシステム構成で撮影及び記録する。
【解決手段】光学系により結像された被写体像を撮像する撮像手段と、撮影対象者の顔画像データが予め登録された記憶手段と、前記撮像手段によって撮像された被写体の顔画像と前記記憶手段に予め登録された顔画像とを顔認証することにより前記被写体の特徴判定を行う特徴判定手段と、前記撮像された被写体像を録画する録画手段とを備え、前記撮像手段による被写体像の撮像中に、前記顔認証により、前記撮像された被写体の顔画像と前記予め登録された顔画像とが一致した場合に、前記録画手段が前記被写体像の録画を開始することを特徴とする特徴判定機能を備えたビデオカメラシステムを提供する。
(もっと読む)
遠隔監視システム及びそのサーバ
【課題】遠隔地に設置されたカメラの制御、及びそのカメラにより撮影された画像の取得と表示が、通信ネットワークを介して携帯端末により可能な遠隔監視システムにおいて、携帯端末の使い勝手を向上させる。
【解決手段】サーバ2は、カメラ4の制御及びカメラ4により撮影された画像を通信ネットワーク1経由で携帯端末へ送信することが可能であり、かつ携帯端末のキー操作に応じてカメラ4を制御する機能を有する。携帯端末の右カーソルキーの操作に応じて、携帯端末で表示中の画像の中心から右方向に位置する移動体を移動体検出部25で検出し、その移動体が携帯端末の画面の中央に表示されるように、その移動体を含む箇所を画像調整部28で切り出し、通信インタフェース部22から通信ネットワーク1を介して携帯端末へ送信する。
(もっと読む)
プレゼンテーション画像配信システム
【課題】プレゼンテーションを行っている発表者を撮影し、画像を配信するプレゼンテーション画像配信システムにおいて、発表者が配信先のモニタなどに映らなくなる事態の発生を低減する。
【解決手段】PTZカメラ1で撮影した画像は、PC2の入力部15からCPU11に入力される。CPU11は、入力された画像から発表者の顔が検出されていない場合に、顔が検出されるように、制御部14に対し、PTZカメラ1のパン、チルト、又はズーム制御を行わせる。PTZカメラ1からPC2へ入力された画像は、出力部16からネットワーク4を介して、遠隔地のPC5に配信され、スクリーン6に表示される。
(もっと読む)
監視システム
【課題】監視場所において異常音が発生した場合に、複雑な設備や配線なしで監視カメラの向きを変え、効率的に監視を行う。
【解決手段】
撮影方向変更可能なカメラ101とマイク102と制御装置103と外部PC104からなり、マイク102から供給される音をPC104に送信し、その音データがPC104に予め登録された音データと一致した場合、指定したカメラ方向のデータをカメラ101に送信し、カメラ101がそのデータに基づき監視方向を変えるようにする。
(もっと読む)
監視カメラシステム及びカメラ式監視方法
【課題】監視カメラの撮影画像で不正行為を監視するときの監視精度を高いものとすることができ、しかもこの監視に誤動作を生じ難くすることもできる監視カメラシステム及びカメラ式監視方法を提供する。
【解決手段】車両1は、電子キー2のパニックボタン16が操作されて電子キー2からパニック電波Spnが発信された際に車両1で警報を鳴らすパニックシステム17を備える。また、車両1は、このパニック電波Spnを受信した際、これをカメラ装置21に中継すべく、トリガ電波Strを発信する。カメラ装置21は、このトリガ電波Strを自身のアダプティブアレイアンテナ25で受信すると、この受信電波を基に電波到来方向を算出する。カメラ装置21は、この電波到来方向に監視カメラ23の撮影方向を合わせ、カメラレンズを車両1に向かせる。
(もっと読む)
カメラ情報表示装置及びカメラ情報表示方法
【課題】ズーム倍率に応じたカメラの視野範囲を直観的に且つ具体的に把握させる。
【解決手段】ネットワークカメラの設置場所に相当する上の平面見取図上の位置に、当該カメラの撮像方向とカメラ本体図形が示す撮像方向とを略一致させてカメラアイコン410a−410dを配置したマップ表示部401を表示し、ネットワークカメラの最大撮影角度を中心角にし、一定の径長を半径にした扇形状の最大撮影角図形SCと、ネットワークカメラのズーム倍率に応じて決定される現在撮影視野角を中心角にし、ズーム倍率に応じて異なる径長を半径にした扇形状の現在視野角図形ZSとを、平面見取図を透視可能なようにして、カメラアイコンに組み合わせて表示するようにした。
(もっと読む)
インターホンシステム
【課題】 簡単な操作によって人感センサの感知方向(感知範囲)を最適に調整することができるインターホンシステムを提供する。
【解決手段】 人感センサ13の感知方向及びカメラ14の撮像方向をそれぞれ変更可能とし、センサカメラCPU12がそれぞれの方向を検出して人感センサ13の方向を変更制御し、人感センサ13の感知方向をカメラ14の撮像方向に向けさせる制御を実施する。居室親機3に設けた方向設定ボタン23bを操作することで、センサカメラCPU12はカメラ14の撮像方向に感知方向が向くよう制御し、カメラ14の撮像範囲を人感センサ13の感知範囲よりも広く設定して、モニタ24に感知範囲を表示させる。
(もっと読む)
監視方法
【課題】警戒監視によって識別した追尾対象を移動ロボットで継続して追尾することが可能な監視方法を提供する。
【解決手段】
移動ロボット10に搭載するカメラとして、光学的ズーム機能を有する監視用カメラ11と操縦用カメラ12を用い、監視用カメラ11を広範囲視野の警邏状態にしてラスタースキャンしながら、操縦用カメラ12からの映像に基づいて移動ロボット10を走行させる警邏行動と、警邏行動中において、監視用カメラ11からの広範囲視野映像内に識別対象物A,Bを発見した際に監視用カメラ11を狭範囲視野の監視状態にして識別対象物A,Bをクローズアップする識別行動と、識別行動において、識別対象物A,Bが追尾対象であると識別した際に監視用カメラ11を狭範囲視野の監視状態に保ちながら、操縦用カメラ12からの映像に基づいて移動ロボット10を走行させて追尾対象を追尾する追尾行動を行う監視方法。
(もっと読む)
監視カメラ装置
【課題】 監視カメラの雲台において、長期間の連続使用環境下で精度の高いパンニング機構を実現する。伝達機構バックラッシ及びヒステリシスの影響や、駆動機構からの油脂や摩耗分の飛散及び、組立時の油脂、異物付着の問題のない、検知分解能と検知エラー耐性の高いパンニング回転角検出機構を、簡易な構成で実現する。
【解決手段】 パンニング軸を、基底部に配置された電装部の電磁シールド空間内まで延長し、その端部付近にエンコーダー機構を構成することで、駆動機構と隔離された空間内に大直径のパターン板を用いたエンコーダー機構を構成する。
(もっと読む)
監視カメラ及び監視システム
【課題】事故や事件、災害などの所定のイベントが同時に複数発生した場合に、これらのイベントを、好適に監視することができる監視カメラ及び監視システムを提供する。
【解決手段】SIPサーバ200と複数の監視カメラ300…とを備える監視システム1000において、監視カメラ300は、1つないし複数のグループにグルーピングされており、一のグループに所属する監視カメラ300は、制御カメラと被制御カメラとを含み、SIPサーバ200は、一のグループに所属する監視カメラ300の中から制御カメラとなる監視カメラを選択し、監視カメラ300は、イベントの発生を検知して、検知されたイベントの相対優先度を算出し、制御カメラは、算出された相対優先度に基づいて一のグループ全体でのカメラワークに関するカメラワーク情報を生成し、各監視カメラ300は、生成されたカメラワーク情報に基づいてカメラ部320の撮像領域を調整する。
(もっと読む)
映像監視装置
【課題】低コスト化、設置作業の簡便化が可能な映像監視装置を提供する。
【解決手段】監視対象領域を撮像する監視カメラ10と、監視カメラ10によって撮像される領域内の監視境界上にスポット光2a,2bを照射するスポット光照射装置20a,20bと、監視カメラ10によって撮像された映像中のスポット光2a,2bを検出し、検出されたスポット光2a,2bの位置に基づいて直線状の監視境界線を設定する監視境界線設定装置とから映像監視装置を構成した。
(もっと読む)
監視装置及び監視システム
【課題】センサの検知時に、侵入者等の侵入物体に対してカメラを旋回して被写体を捉えるシステムであるが、カメラの旋回やズームに一定の時間を要するため、即座に侵入者を捉えることが困難であった。
【解決手段】侵入した人物の位置を検知する複数のセンサと、該センサによって検知された侵入した人物の位置に対して、上記制御部の制御に基づいて視野角を変更するカメラと、複数のプリセット位置を予め登録し上記複数のセンサから出力された位置座標に基づいて上記侵入した人物の移動予測を行い、かつ侵入した人物の移動方向から侵入した人物の顔の向きを算出し、前もって上記カメラの視野角を変更して追尾する制御部とを備えた。
(もっと読む)
カメラの制御と構図のための方法及び装置
本発明は、制御手段によって制御される可動複数のカメラを含め、移動する物体のビデオ映像をキャプチャするための装置に関し、物体の動きに追従するように構成される少なくとも1つのカメラを含む、動く上記物体のビデオ映像を取り込む装置が提案される。そして、カメラの映像フレーム内部の上記物体の画像の位置が、少なくとも1つのバイアス手段により影響を及ぼされる、またはバイアスをかけられる。 (もっと読む)
情報処理装置及び情報処理方法並びにプログラム
【課題】 未知の撮像装置を容易に使用することができる情報処理装置及び情報処理方法並びにプログラムを提供する。
【解決手段】 ネットワークに接続された撮像装置から撮像機能の制限情報を取得し、この制限情報に基づいて一の撮像機能のパラメータの選択に応じて他の撮像機能の選択可能なパラメータを制限する設定画面を表示する。これにより、ユーザは使用したい機能を優先順に選択すれば、所望の機能を持つ撮像装置を使用することができる。
(もっと読む)
撮像装置、撮像信号の出力方法、および監視カメラシステム
【構成】基準画像BIMに基づいて被写体の動き検出を行い(S7)、基準画像BIMが20枚目であれば(S9:YES)基準画像BIMをネットワーク102に出力する(S19)。20枚目でない場合(S9:NO)で、被写体の動きが検出されなければ(S11:NO)基準画像BIMの部分である部分画像BIMをネットワーク102に出力する(S15)。また、20枚目でない場合(S9:NO)で、被写体の動きが検出されれば(S11:YES)基準画像BIMをネットワーク102に出力する(S17)。
【効果】ネットワーク102のトラフィックの増大を抑制し、データの記憶装置の記憶容量を小さくすることができる。
(もっと読む)
監視装置及び監視方法
【課題】不動体監視と追尾監視を同時に行った場合に、監視途中での中断を防ぐことが可能であり、不動体監視機能と追尾監視機能を同時に制御することができる監視装置を提供する。
【解決手段】撮像部201により撮影された静止物体を監視し、静止物体の動きを所定時間検知しなかった場合に不動体であると判定する第1の監視手段と、撮像部201により撮影された移動物体を、追尾監視する第2の監視手段とを備える。また、第1の監視手段による監視中に移動物体を検知した場合、または、第2の監視手段による監視中に静止物体を検知した場合、第1の監視手段と第2の監視手段を所定条件において両方動作させる第3の監視手段を備える。各手段は制御部205がその機能を有する。
(もっと読む)
141 - 160 / 415
[ Back to top ]