
Fターム[5C054CF06]の内容
閉回路テレビジョンシステム (47,623) | 撮像装置の支持、駆動機構 (923) | 駆動機構 (814) | 角度機構 (415)
Fターム[5C054CF06]に分類される特許
81 - 100 / 415
アムニディレクショナルと防犯・監視カメラ統合で死角無し
【課題】従来の監視カメラでレンズによる制約から起きる死角をなくし、かつ、歩行者側が死角にある対象から自分を守るツールを得る。
【解決手段】凸面鏡を天井に固定し、歩行者から見た死角をなくす。また、CCDカメラステーの下側に現在ある防犯・監視カメラやダミーカメラを必要な場所に複数配置することで、常に360度枠に特定の人物を追跡することができる。また、ドーム型監視カメラを水平・上下90度・ズーム機能付自動で動くものとした場合、特定人物を死角無しに追え、拡大しながら監視できる。
(もっと読む)
撮像システムおよび撮像装置

【課題】入力画像などから得られる各種情報を複数の撮像装置間で送受信することにより、多様な撮像制御を行うことができる撮像システムおよび撮像装置を提供する。
【解決手段】撮像システムは撮像装置Aと撮像装置Bとから構成される。撮像装置Aが追被写体Aを追尾し、撮像装置Bは被写体Bを追尾する。撮像装置A、Bは、画像解析部114、動作制御部115、メタデータ生成部116、接近判定部117、動き予測部118、構図決定部119、撮像トリガ生成部120を備える。被写体Aと被写体Bとが接近した場合に撮像装置Bからメタデータを撮像装置Aに送信し、メタデータに基づいて撮像装置Aは構図を決定する。そして、被写体Aと被写体Bが近づいて被写体Bが撮像装置Aの撮像範囲に入ったら決定した構図で撮像を行う。
(もっと読む)
監視カメラシステム
【課題】撮像範囲の照度の状況に応じて、監視カメラの撮像範囲の照度の均一化を図り、撮像映像の画質の向上を図ることが可能な監視カメラシステムを提供する。
【解決手段】監視カメラ2の撮像範囲を照明する1ないし複数の照明装置4の配光特性および光量を、監視装置3の照明制御部40により、監視カメラ2の向きを示す方向情報および撮像範囲における照度を判定するための照度判定用情報に基づき制御する。つまり、監視装置3は、撮像範囲計算部20により監視カメラ2の撮像部10が出力する方向情報に基づき監視カメラ2の撮像範囲の位置を計算し、照度計算部30により撮像部10が出力する照度判定用情報に基づき撮像範囲の照度を計算した結果を用いて、照明制御部40により、当該撮像範囲を照明する照明装置4の配光特性および光量を制御するための制御情報を生成し、生成した該制御情報を照明装置4に対して出力する。
(もっと読む)
制御装置、カメラシステム及びプログラム
【課題】表示されている画像に対応するカメラが制御可能であるかを確実に認識できるとともに、表示されている画像が全体画像のどの範囲に位置するかを確実に認識すること。
【解決手段】カメラ端末装置200で撮像されたパノラマ画像を表示するパノラマ画像表示領域と、パノラマ画像で指定された位置に対応する領域を拡大して拡大画像を表示する拡大画像表示領域と、を表示するように制御する表示処理部305と、パノラマ画像上で指定された位置に対応する領域をカメラ端末装置200で撮像するように制御する制御部310と、を有し、表示処理部305は、制御部310による制御が可能か否かに応じて前記全体画像の表示状態を変更する、センターサーバー300が提供される。
(もっと読む)
エレベータの防犯用追尾撮影システム
【課題】 乗りかご内の犯罪等の立証に利用できる顔アップ画像を確保することにある。
【解決手段】 エレベータドアのドア開状態を検出し出力するドア開検出センサ14と、乗りかご2内に入って来た被写体を撮影するパン・チルト機構部22を備えた監視カメラ21と、この監視カメラ21で撮影された画像の中の被写体が人間か否かを認識し、人間であると認識したときに当該人間の顔位置を認証する顔認証処理部31及び認証された顔位置に従ってパン・チルト機構部を介して監視カメラが前記顔位置に向くように追尾し、かつ所定の大きさの顔アップ画像となるようにズームアップした後に焦点調整を行い、該当人間の顔アップ画像を撮影して記録する追尾撮影処理部32を有する顔認証追尾処理装置5とを備えたエレベータの防犯用追尾撮影システである。
(もっと読む)
監視カメラ装置
【課題】カメラ本体の向きを水平または水平に近い位置まで調整することができる監視カメラ装置を提供する。
【解決手段】外側を球体型ケースで覆い、内部に撮像光学部を配設してなるカメラ本体を備える監視カメラ装置であって、一端開口側よりカメラ本体11が収容され、かつ、収容されたカメラ本体11のレンズ面側の一部を露出させて回動可能に位置決めする複数個の爪部46を他端側に有するカメラホルダ13と、カメラホルダ13内で回動されたカメラ本体11のレンズ面がカメラホルダ13と重ならないようにカメラホルダ13の爪部46と爪部46の間の一部を一端開口側に向かって切り欠いて形成された切欠部46と、を備えた監視カメラ装置。
(もっと読む)
複数の特徴検出器の適用に基づいた画像特徴検出
撮像装置及び撮像方法
【課題】プリセット再現時にプリセット位置が大きくずれた際に、パンチルト位置をリセットしている間の撮影動作の中断による監視不能状態を最小限に抑えることができるようにする。
【解決手段】登録画像と取得画像とのズレ量が検出できない場合は、他のプリセット位置を巡回し、それぞれのプリセット位置で撮影した画像とプリセット位置登録時の登録画像とを比較したときに、両画像のズレ量を検出可能であった場合は、最初のプリセット位置の撮像画像を取得して登録画像を再登録する。そして、全てのプリセット位置にて両画像のズレ量を検出できなかった場合は、初期化を行った後で再度最初のプリセット位置に撮影方向を移動するようにすることにより、プリセット再現時にプリセット位置が大きくずれた際に、撮影方向をリセットするのに必要な時間を短縮できるようにする。
(もっと読む)
映像監視システム及び監視映像表示装置
【課題】所望の監視地点を撮影範囲内に含んでいる監視カメラの監視映像を速やかに表示することができるようにする。
【解決手段】地図表示部13が、地図情報記憶部11により記憶されている地図情報にしたがって監視対象エリアの地図を操作モニタ19に表示する一方、カメラ情報記憶部12により記憶されているカメラ情報を参照して、監視カメラが配置されている監視対象エリア内の位置(X,Y)を確認し、その位置(X,Y)に対応する地図上のポイントに監視カメラのカメラアイコンを表示するとともに、監視カメラの撮影範囲を地図上に表示する。
(もっと読む)
移動体画像追尾装置
【課題】 2軸ジンバル構造であっても追尾性能を改善可能な移動体画像追尾装置の提供
【解決手段】
2軸ジンバル構造であって、移動体を撮影して画像データを取得する取得部と、追尾誤差を検出する第1検出部と、回転部ごとの姿勢を示す角度を検出する第2検出部と、前記角度と、前記追尾誤差とに基づいて、前記移動体の軌道を推定する推定部と、推定された前記移動体の軌跡と、前記天頂との位置関係を求める第1の算出部と、前記追尾誤差と、前記角度とに基づいて、前記移動体を追尾するよう前記駆動機構を制御する第1の指令を生成する第1の生成部と、前記位置関係と、前記追尾誤差と、前記角度とに基づいて、天頂付近において前記移動体の軌跡が前記天頂から離れるようにシフトさせた補正軌道を求め、前記補正軌道を追尾するよう制御する第2の指令を生成する第2の生成部と、前記第1の指令または前記第2の指令のいずれかを選択する選択部とを備える。
(もっと読む)
カメラ状態監視装置、カメラ状態監視プログラム及びカメラ状態監視方法
【課題】高精度にカメラの異常を判定する。
【解決手段】複数のカメラC1〜Cnのうちの一のカメラにより撮影された映像データを圧縮したときのデータ量を算出し、一のカメラによりそれ以前に撮影された映像データを圧縮したときのデータ量からの変化率を算出する第1変化率算出部22と、一のカメラから所定距離内に存在し、かつ一のカメラの撮影する方角を基準とする所定角度範囲を撮影するカメラを抽出するカメラ抽出部24と、抽出されたカメラにより撮影された映像データを圧縮したときのデータ量を算出し、抽出されたカメラによりそれ以前に撮影された映像データを圧縮したときのデータ量からの変化率を算出する第2変化率算出部26と、第1変化率算出部により算出された変化率と、第2変化率算出部により算出された変化率とを比較して、一のカメラの異常を判定する異常判定部28と、を備える。
(もっと読む)
映像送信装置及びその制御方法
【課題】 カメラが外部からの衝撃を受けた場合において、衝撃によって撮影アングルが変化してしまった場合は可視制限が無効となり、見せたくない映像をクライアントに配信してしまう。
【解決手段】 撮像部102に対する衝撃のレベルを衝撃レベル検出部108で検出し、検出した衝撃のレベルに応じて、クライアント110、111、112への映像データの送信を制限する。
(もっと読む)
監視システム
【課題】監視エリア内に侵入した障害物(侵入者や不審侵入車両など)を検知して警報信号を出力するとともに、障害物の位置情報によって監視カメラを制御し、鮮明な映像によって障害物を識別可能な監視システムを提供する。
【解決手段】第1のマイクロ波センサ2と第2のマイクロ波センサ12により障害物の検知を行う。第1のマイクロ波センサ2は反射板16と所定間隔(100m)をおいて対向は位置し、その距離(100m)を記憶し、正常時の第1のマイクロ波センサ2のレベルデータと、検知時のレベルデータとを比較照合し、障害物の位置を特定する。その位置情報に従って監視カメラ20のアングル制御、フォーカス制御、ズーミング制御し、障害物の検知時に鮮明な監視カメラ20の映像・音声を基地局用受信機30で記憶するとともに、警報ブザー33を作動し、監視エリアでの異常を基地局に報知する。
(もっと読む)
音源位置特定方法
【課題】 ネットワーク配線に加えて、マイクロホン接続のための追加配線を不要する、音源位置特定方法を提供する。また複数個あるマイクロホンで2種類以上のクロックを用いても音源位置特定を可能にした、音源位置特定方法を提供する。
【解決手段】 監視カメラ1、11は、マイクロホン2、3、12、13を有し、マイクロホン2、3、12、13により受音したオーディオ信号を元に音源方向情報を求め、サーバー20は、監視カメラ1、11で求められた音源方向情報に基づき、音源位置情報を特定する。
(もっと読む)
旋回カメラ制御システム及び旋回カメラ制御方法
【課題】旋回カメラ装置を利用する場合に、その旋回カメラ装置を制御するシステムを容易に構築できる旋回カメラ制御システムを提供する。
【解決手段】制御装置90の表示手段91は、旋回カメラ装置80が撮影した映像を表示する画面を有する。移動位置検知手段92は、画面の中心に移動させる映像上の位置として指定された画面上の絶対位置を検知する。絶対位置送信手段93は、絶対位置を旋回カメラ装置80に送信する。旋回カメラ装置80の撮影方向検出手段81は、撮影している撮影方向を検出する。移動量算出手段92は、制御装置90から受信した絶対位置及び撮影方向に基づいて、画面上で指定された位置の映像を表示手段91の画面の中心にまで移動させるための撮影方向の変化量を算出する。駆動手段83は、算出した変化量に基づいて撮影方向を旋回させる。
(もっと読む)
カメラ制御システムおよびその方法およびその動作処理プログラムを記憶した記憶媒体
【課題】 カメラの所望の動作状態に迅速に制御できることを目的とする。
【解決手段】 カメラの撮像方向およびズーム倍率を制御可能とするカメラ制御システムにおいて、前記カメラの撮像方向を制御することによって前記カメラの撮像可能な領域を表示するための撮像可能領域表示手段と、前記撮像可能領域表示手段によって表示される撮像可能領域上の2点を指定し、その指定された2点の位置および距離に基いて前記カメラの撮像方向およびズーム倍率の制御を指示する指示手段とを有し、前記指示手段は、該指定された2点間の距離が所定値未満の場合、該指定された2点の位置に基いて前記カメラの撮像方向のみ制御を指示することを特徴とする。
(もっと読む)
撮像装置、ならびに、その制御方法および制御プログラム
【課題】旋回型の撮像装置において、不正な撮像範囲の変更があった場合、その旨を報知できるようにする。
【解決手段】監視カメラユニットでは、オートパン動作中であれば、等速制御中に検出される角速度の値が、オートパン動作で予想される角速度の値に対して閾値以上大きくなった場合または閾値以上小さくなった場合には、異常報知がなされる。つまり、等速制御中に、鏡筒に対して外部から力が加えられたり、鏡筒を移動させる機構の不具合により円滑な移動が阻害されることによって、当該鏡筒の正常な等速移動が妨害された場合、ステップS60で角速度についての差が大きくなったとして、ステップS120で異常報知がなされる。
(もっと読む)
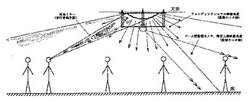
追跡監視用カメラ装置及びこれを採用する遠隔監視システム
【課題】広域監視カメラと集中監視カメラを一体として備え、広範囲の領域に亘って全体的な状況の監視と共に、特定領域や対象物の集中監視と追跡をいずれも円滑に行うことができ、直下領域に陰影領域が生じないカメラ装置。
【解決手段】本発明のカメラ装置は、メインフレームと、第1カメラユニットと、第2カメラユニットとを備える。メインフレームは、法線が外側の下方に向かうレンズの設置面を備える。第1カメラユニットは、メインフレームに設置され、光軸が外側の下方に向かうように上記レンズの設置面に配置する広角レンズと、上記広角レンズを介して入射する光を電気的信号に変換する第1イメージセンサーとを備え、監視用カメラ装置の直下地点を含む周辺映像を撮影する。第2カメラユニットは、第2イメージセンサーを備え、上記メインフレームに対して水平回転及び垂直回転できるように設置される。好ましくは、上記メインフレームは、外周面から外部へ突出しており、その前面が外側の下方に向かう支持突出部を備え、上記広角レンズは、支持突出部の前面に取り付けられることができる。 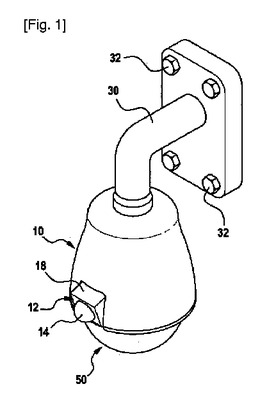 (もっと読む)
(もっと読む)
合成表示装置
【課題】監視対象領域内の動体の模様・形状の複雑さや、監視対象領域内の遮蔽物の有無に関わらず、複数のカメラにより撮影された画像を合成することができるようにする。
【解決手段】床領域の画像を監視対象領域の直交座標系における平面位置に射影して、平面射影画像を生成する平面射影部9と、監視対象領域の直交座標系上で動体が存在している領域に板モデルを設置し、その板モデルの表面に動体領域画像抽出部4により抽出された動体領域画像を貼り付ける動体画像貼付部11とを設け、画像合成部13が、その平面射影画像及び動体領域画像が貼り付けられた板モデルの画像を合成する。
(もっと読む)
監視画面表示制御装置
【課題】不審者を検出し移動方向を計算し、移動方向にあって監視カメラ視野内に入ると推測されるカメラを特定、特定されたカメラの画像を表示装置に通過すると推測される順に表示画面を並べ替え表示させる。
【解決手段】複数のカメラ画像を監視する場合に不審者を検知し移動方向を求めることで、不審者の移動先にあるカメラ画像をあらかじめ表示装置に表示させる。監視カメラと画像比較部と移動方向検出部と移動方向カメラ検出部と表示制御部と表示装置から構成される。不審者は正常時との差分画像として抽出され、t時間前との差分画像との位置関係のずれから不審者の移動方向(移動直線)を求める。各監視カメラの撮影方向に対し仮想的な直線を持たせこの直線と不審者の移動方向(移動直線)との交点が求まる場合を移動方向監視カメラ候補とし、現在監視中のカメラ位置との交点の距離が短い順に並び替えて不審者の移動方向にあるカメラの順位付けを行う。
(もっと読む)
81 - 100 / 415
[ Back to top ]