
Fターム[5C122DA11]の内容
スタジオ装置 (397,422) | スタジオ装置の用途/種類 (48,563) | カメラ (47,519) | 監視カメラ/防犯カメラ/防災カメラ (2,706)
Fターム[5C122DA11]に分類される特許
21 - 40 / 2,706
画像処理装置および方法、並びにプログラム
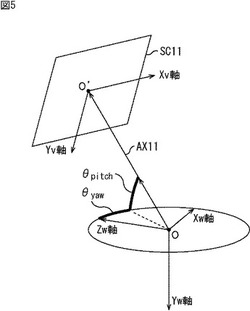
【課題】より簡単かつ迅速にパノラマ画像の所望の方向の領域を切り出すことができるようにする。
【解決手段】画像処理装置は、球面に投影されたパノラマ画像の所定の視線方向の領域を切り出して表示させる場合、指定された視線方向により定まる仮想的なスクリーンに投影されるパノラマ画像の領域を出力画像として表示させる。すなわち、画像処理装置は、スクリーン上の位置に投影されるパノラマ画像の画素位置を近似関数により算出し、出力画像を生成する。このとき、画像処理装置は、近似関数による近似誤差の評価を行なう。具体的には画像処理装置は、スクリーン上の書き込み領域内の各位置に対応するパノラマ画像の画素位置を1つの近似関数を用いて求めるときに、近似誤差が許容量以下となるように書き込み領域の範囲を定める。本技術は、画像処理装置に適用することができる。
(もっと読む)
画像処理方法、画像処理装置及び画像処理プログラム

【課題】時間的、空間的な連続性を保ちつつ、誤検出を低減しながらも個人が特定できないようにして人物領域を検出する。
【解決手段】処理対象画像と、直前の処理により生成された背景画像と、分散値画像に基づき、背景画像と処理対象画像の各画素値を分散値画像に応じた重み付け和により背景画像を更新するステップと、処理対象画像に対して荷重平均フィルタを使用し低周波数成分画像を生成するステップと、処理対象画像と低周波数成分画像の差分から高周波数成分画像を生成するステップと、背景画像と処理対象画像との差異から人物領域候補を算出するステップと、高周波数成分画像の各画素の値を算出された人物領域候補の各画素の値を用いて抑制するステップと、抑制後の高周波数成分画像と低周波数成分画像を合成し結果画像を生成するステップと、結果画像を処理結果として出力するステップとを有する。
(もっと読む)
撮像装置
【課題】 長期間の連続使用環境下で、精度の高いパンニング機構を実現する。
【解決手段】 カメラユニット4の両側に設けたチルト軸9、10のそれぞれを、パンニング基台2上に立設された第1、第2支柱部5、6の軸受部に組込む。一方の第1支柱部5内にチルト駆動機構を組込み、他方の第2支柱部6内にエンコーダ機構による光学センサを構成することで、駆動機構と隔離された空間内に、大直径のパターン板を用いたエンコーダ機構を実現する。
(もっと読む)
情報出力装置、検知装置、プログラム及び情報出力方法
【課題】種々の誤検知発生要因に対応することが可能な情報出力装置、検知装置、プログラム及び情報出力方法を提供する。
【解決手段】被写体を撮影した画像に関する情報を出力する情報出力装置であって、前記画像を1又は複数の画像エリアに分割する分割手段と、撮影時間の異なる複数の前記画像から当該画像間の差分となる特徴量を前記画像エリア毎に算出する特徴量算出手段と、前記特徴量算出手段で算出された各画像エリアの特徴量に基づいて、前記特徴量に変化のある画像エリアを検知する画像エリア検知手段と、前記画像を構成する各画像エリアから、前記被写体のおかれる環境に応じて定まる条件に該当する画像エリアを特定する特定手段と、前記検知手段が検知した画像エリアから前記特定手段にて特定された画像エリアを除いた画像エリアに関する情報を出力する出力手段と、を備える。
(もっと読む)
機械式駐車場の車両はみ出し検出装置および方法
【課題】機械式駐車場の乗降室内で撮像された画像から車両の輪郭を正確に抽出することで、パレットに対する高精度のはみ出し検出を可能にする。
【解決手段】差分画像取得部62は、所定の間隔で撮像された二枚のフレームからフレーム間差分画像を計算する。初期輪郭設定部68は、車両の入庫開始からパレット上での停止までの間に差分画像取得部62によって計算されたフレーム間差分画像の論理和を計算し、論理和の画像の外周形状を初期輪郭とする。輪郭抽出部72は、初期輪郭をエネルギー最小化原理にしたがって内側に収束させていくことで初期輪郭に内包される物体の輪郭を抽出する動的輪郭モデルを実行して、フレーム内の車両の輪郭を抽出する。比較判定部74は、抽出された車両の輪郭と、パレット上の車両停止範囲を表すものとして予め設定されている基準枠とを比較し、車両の輪郭が基準枠内にあるか否かによって車両のはみ出しの有無を判定する。
(もっと読む)
撮像装置
【課題】 コストダウンと小型化とを図る上で有利であるとともに、撮像部の撮影方向を変更する速度に依存することなく且つ様々なタイミングで、本体内を冷却することができる撮像装置を提供することができる。
【解決手段】 レンズユニット104および撮像素子105により被写体を撮像する撮像装置であって、レンズユニット104の撮影方向を変更するチルト軸120と、チルト軸120を駆動させるための動力源と同一の動力源であるチルトモータ125により駆動され、カメラ本体101内の気体を循環させるチルトファン124と、チルトモータ125により、チルト軸120およびチルトファン124を選択的に駆動させるためのチルトソレノイドアクチュエータ201と、を有することを特徴とする。
(もっと読む)
カメラシステム
【課題】複数のカメラが配列されたカメラシステムにて移動物体の位置を検出する場合に、カメラの外部パラメータの校正を一群のカメラごとに行うと、カメラ群間で校正誤差が累積して精度が低下する。
【解決手段】クラスタごとに、共通視野を利用して設定したクラスタ座標系における各カメラの位置・姿勢を求める。クラスタ処理部2はクラスタごとに複数のカメラの画像からローカル座標系での物体位置を算出する。統合処理部3は、各共通カメラの位置・姿勢について隣接クラスタ間にて所定の誤差を持たせることによりクラスタ座標系の相互の配置関係を調整した統合座標系を設定し、クラスタ座標系での物体位置を統合座標系に変換する。
(もっと読む)
カメラ姿勢算出装置
【課題】複数台の監視カメラの監視空間が什器等が設置された建物内、或いは建物内の廊下などの場合、各カメラの姿勢を校正する基準物体を設置するスペースを確保できない。
【解決手段】自己及び相互の鉛直下を撮像可能に設置された2台のカメラ2a,2bのそれぞれの鉛直下にマーカー7a,7bを配置する。視線方向算出部30は、例えば、カメラ2aについて当該カメラで撮像した画像における自己マーカー7a及び他方カメラ鉛直下の相手マーカー7bの位置座標を用いて当該カメラから各マーカーへの視線方向を算出する。姿勢算出部31は、自己マーカーへの視線方向から得られる鉛直方向と、相手マーカーへの視線方向から得られるカメラ2a,2b間の方位とを用いて世界座標系における各カメラの姿勢を算出する。
(もっと読む)
ズームレンズ及びそれを有する撮像装置
【課題】 広画角、高ズーム比でしかも全ズーム範囲にわたり高い光学性能を有するズームレンズを得ること。
【解決手段】 ズームレンズは、物体側から像側へ順に、ズーミングのためには不動の正の第1レンズ群、ズーミングに際して移動する負の第2レンズ群、ズーミングに際して移動する正の第3レンズ群、ズーミングに際して移動する第4レンズ群、ズーミングのためには不動の正の第5レンズ群から構成され、前記第2レンズ群は広角端から望遠端へのズーミングに際して結像倍率が−1倍となる点を通過し、前記第2レンズ群の結像倍率が−1倍となるズーム位置fzにおける第3レンズ群と第4レンズ群からなる合成レンズ群の結像倍率をβ34、広角端を基準としたときの前記ズーム位置fzにおける前記第2レンズ群と前記第3レンズ群の光軸上の変位量を各々m2、m3としたとき、
−1<β34<−0.3
4.0<|m2/m3|<15
を満足する。
(もっと読む)
カメラ装置
【課題】曇りを効率良く、低減させるカメラ装置を提供する。
【解決手段】 レンズ22を有するカメラと、レンズ22の前に透光性のカバー12を有する第1の筐体と、第1の筐体内にカメラを支持し、透光性のカバー12側に間隙を有して包囲する第2の筐体と、間隙から透光性のカバー12に向けて第2の筐体内の空気を流出可能とする空気流路と、を備え、空気流路は第2の筐体とレンズ22の鏡筒との間に形成される。
(もっと読む)
監視カメラ装置及び監視カメラシステム
【課題】
監視カメラ装置で取得した映像を、通信負荷増大による通信異常により監視カメラ制御装置で記録できないことがあり、監視カメラシステムとして全ての映像を記録できない場合が発生する。
【解決手段】
監視カメラ装置に優先度を持たせ、通信負荷が増大し、通信異常となる前に優先度の低い監視カメラ装置からの映像送信を一時停止し、監視カメラ装置内部または監視カメラ装置に付属する外部媒体へ記録を行う。また、送信を一時停止する代わりに映像の解析精度を向上させることで異常を高精度で検知し、異常時には送信を再開する。
(もっと読む)
電子装置
【課題】簡単に外部カバーを天井に取り付けることができる電子装置を提供する。
【解決手段】外部カバー6の外部フランジ62には、カバー固定ネジ8のネジ頭を通す第1通し穴63と、第1通し穴63に連通し、当該第1通し穴63から弧状に延在する第1長穴64であって、カバー固定ネジ8のネジ頭を通さない第1長穴64と、第1長穴64の一端から他端までの間に形成され、カバー固定ネジ8のネジ頭が嵌め込まれる凹部65と、が設けられ、この凹部65を設けることにより第1通し穴63と第1長穴64との連結部の縁部に段差67が設けられている。
(もっと読む)
撮像装置、撮像装置の制御方法及びプログラム
【課題】撮影方向の設定を短時間に行うことができるようにする。
【解決手段】キャプチャされた画像データの輝度値を評価する処理を実行し、最も輝度値が高い画素位置、つまり画像中の最も明るい領域が画面の中央に位置するかどうかをチェックする。このチェックの結果、画面の中央ではない場合は、撮影された画像内で最も明るい領域(輝度値が高い画素位置)が画面の中央位置に来るようにカメラの撮影方向を変更する処理を実行し、画像中の最も明るい領域が画面の中央に位置するまで、撮像処理、輝度値の評価、及び撮影方向の変更を繰り返す。
(もっと読む)
不審者検知装置、不審者検知方法およびプログラム
【課題】カメラ画像から不審者を自動的に検知する。
【解決手段】不審者検知装置は、撮影手段と、撮影手段によって撮影された画像から人物を抽出する画像解析手段と、抽出された人物の行動特徴量を所定時間おきに算出し、行動特徴量の度数分布を求める度数分布解析手段と、前記度数分布解析手段によって求められた行動特徴量の度数分布に基づいて、抽出された人物が不審者であるか否かを判定する判定手段と、を備える。行動特徴量としては、移動速度、移動方向の変動量、所定の対象物との間の距離、頭の高さを例示できる。正常行動と不審行動についての行動特徴量度数分布をあらかじめ記憶しておき、これと画像から得られた行動特徴量度数分布を比較することで不審者を検知する。あるいは、画像から得られた行動特徴量度数分布のばらつきに基づいて不審者を検知することもできる。
(もっと読む)
拡大観察装置
【課題】撮像素子の位置ずれが生じた場合でも、画質の劣化を防止しつつ対象物の高解像度の画像を表示することが可能な拡大観察装置を提供する。
【解決手段】画素ずらし処理時に、単波長光が観察対象物に照射された状態で、アクチュエータによりカラーCCDが観察対象物と相対的に一画素分ずつ異なる複数の位置に移動される。このとき、複数の位置で観察対象物が撮像され、複数の位置の各々に対応する画像データが生成される(ステップS19)。生成された複数の画像データに基づいて各撮像時にカラーCCDの位置ずれが生じたか否かが判定される(ステップS20)。カラーCCDの位置ずれが生じた場合に、カラーCCDの位置ずれの量に基づいて画像データが補正される(ステップS21)。補正された画像データおよび他の位置に対応する画像データを合成することにより単波長領域画像データが生成される。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】試料の形態変化を定量的に観察できるようにする。
【解決手段】検出部52は、時間の経過とともに形態が変化する試料18の観察画像から、試料18としての破骨前駆細胞の領域を検出する。重畳部53は、時刻の異なる観察画像上の破骨前駆細胞の領域を重ね合わせ、演算部54は、重ね合わされた破骨前駆細胞の領域の面積に基づいて破骨前駆細胞の形態変化の度合いを算出し、形態変化の度合いに基づいて破骨前駆細胞が分化したかを判定する。加工部55は、分化したかの判定結果に基づいて、観察画像上の分化した破骨前駆細胞(成熟破骨細胞)と、分化していない破骨前駆細胞とを異なる表示形式で表示させる。本発明は、共焦点顕微鏡を用いた観察システムに適用することができる。
(もっと読む)
画像表示装置及び画像表示装置におけるマイクロフォンの調整方法
【課題】異なる複数の周波数の音波の信号の位相を一致させる各周波数毎の調整値を、効率的に算出する画像表示装置、マイクロフォンの調整方法を提供する。
【解決手段】音源が発する音波を検出するマイクロフォンM1等を有するマイクロフォン群と、音波がマイクロフォン群に到達する時間差に基づき、音源位置を算出する音源位置算出手段とを備えた画像表示装置1で、各マイクロフォンから等距離だけ離れた位置に配置して、音波として、異なる複数の周波数の音波を含むホワイトノイズを発する試験音波発生手段80、85と、音源位置算出手段によって算出した試験音波発生手段の位置に基づき、異なる複数の周波数の音波がマイクロフォン群に到達する時間差を、各周波数毎に算出し、時間差を零にするようにマイクロフォン群によって検出した音波の信号の位相を一致させる各周波数毎の調整値を、一括して算出する調整値算出手段と、を有する。
(もっと読む)
撮像装置、撮像装置の制御方法
【課題】 ネットワークを介して撮像画像を配信する撮像装置における動作パラメータの設定を該ネットワークを介して行う場合に、より確実に動作パラメータの設定を行うための技術を提供すること。
【解決手段】 第1の外部装置から問い合わせコマンドを受信すると、該第1の外部装置に対してパラメータを送信すると共に、タイマにカウントを開始させる。カウント開始からカウント値が規定値に達するまでの期間内で変更コマンドを受信すると、該変更コマンドの送信元が第1の外部装置である場合、撮像装置に設定されているパラメータを変更コマンドに従って変更する。第2の外部装置である場合、撮像装置に設定されているパラメータを変更することなく、撮像装置に設定されているパラメータを変更することができない旨を示すエラー通知を、第2の外部装置に対して送信する。
(もっと読む)
顕微鏡システム
【課題】検鏡法に応じた画像の方向性をより一層活かした画像を生成することができる顕微鏡システムを提供する。
【解決手段】試料からの光を集光して該試料の観察像を生成する顕微鏡と、観察像を電子的に撮像して画像信号を出力する撮像素子42と、画像信号に対応する画像の方向性に関する方向性情報を含む設定情報を顕微鏡から取得する顕微鏡コントロール部と、上記画像に対し、方向性情報に応じて画像のコントラストを強調する処理を実行する信号処理部201とを備える。
(もっと読む)
顕微鏡装置
【課題】より迅速に、よりサンプルにピントが合った画像を取得することができる。
【解決手段】撮像素子110は第1の面に結像された像に基づいて画像信号を出力する。AF素子111は第2の面に入射された光に基づいてコントラスト信号を出力する。光学系109は、第1の領域の一部である第2の領域の像を第1の面に結像させ、第2の領域の中にあり第2の領域の中心から少なくとも第1の方向にずれた位置に設定された第3の領域からの光を第2の面に入射する。合焦点検出部112は第2の領域の合焦点を算出する。制御部114は、合焦点に基づいて第2の領域を合焦位置に合わせ、第2の領域が第1の領域上を第1の方向に走査するように光学系109とステージ102との相対位置を変化させながら、撮像素子110が複数の画像信号を出力するよう制御する。画像信号生成部115は、複数の画像信号に基づいて画像を作成する。
(もっと読む)
21 - 40 / 2,706
[ Back to top ]