
Fターム[5C122FH06]の内容
Fターム[5C122FH06]に分類される特許
161 - 180 / 698
情報処理装置、情報処理方法、プログラム、及び光学顕微鏡を搭載した撮像装置
【課題】光学顕微鏡により得られる画像に発生する複雑なディストーションを、高精度に補正することができる情報処理装置、情報処理方法、プログラム、及び光学顕微鏡を搭載した撮像装置を提供すること。
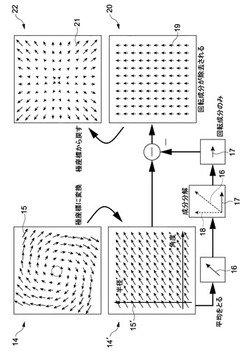
【解決手段】情報処理装置により、チェッカーパターンが撮影された校正用画像の輝度分布に関する標準パターン情報として、正弦波状の曲面を表す関数が生成される。校正用画像の各画素の輝度値と関数の値とのマッチング処理により、校正用画像上の交点が高い精度で判定される。これにより上記交点と理論的なチェッカーパターンの交点との差分に基づいて算出される補正用ベクトル場22の精度も高いものとなる。また補正用ベクトル場22は、平行移動成分と回転成分とをのぞく成分として算出されるので試料画像の補正量を少なくすることができる。以上により光学顕微鏡により得られた試料画像に発生する複雑なディストーションを高精度に補正することができる。
(もっと読む)
撮像装置及び撮像システム

【課題】撮影した映像の無駄な部分を除外し、移動体前方と移動体内の被写体の解像度を高くすることが可能な撮像装置を提供する。
【解決手段】この撮像装置100は、車両(移動体)1の進行方向(矢印)にある車外景色(第1の被写体)と車両1に搭載したドライバー(第2の被写体)5とを同時に撮像する撮像装置20であって、車外景色像を投影するミラー(第1の投影部材)3及びドライバー5を投影するミラー(第2の投影部材)4により構成した組ミラー(投影手段)21と、この組ミラー3により投影した車外景色像及びドライバー像5を撮像するカメラ(撮像手段)6と、を備え、組ミラー3は、ミラー3及びミラー4の配置角度αを任意に設定可能な構成を有し、同時に投影した車外景色及びドライバー5をカメラ6に集光する位置に配設される。
(もっと読む)
画像処理装置
【課題】
画像信号処理によって精度良く歪みを補正するために3次以上の多項式近似を用いることが多いため、演算コスト、回路規模の点で不利である。
【解決手段】
画像内の位置に応じた補正を行うことで、多項式近似よりも演算コストの低い線形補間を利用して補間を行い、基準点に対する歪みの対称性を利用することで画像補正用メモリや設定用レジスタを削減可能となる。
(もっと読む)
追跡監視用カメラ装置及びこれを採用する遠隔監視システム
【課題】広域監視カメラと集中監視カメラを一体として備え、広範囲の領域に亘って全体的な状況の監視と共に、特定領域や対象物の集中監視と追跡をいずれも円滑に行うことができ、直下領域に陰影領域が生じないカメラ装置。
【解決手段】本発明のカメラ装置は、メインフレームと、第1カメラユニットと、第2カメラユニットとを備える。メインフレームは、法線が外側の下方に向かうレンズの設置面を備える。第1カメラユニットは、メインフレームに設置され、光軸が外側の下方に向かうように上記レンズの設置面に配置する広角レンズと、上記広角レンズを介して入射する光を電気的信号に変換する第1イメージセンサーとを備え、監視用カメラ装置の直下地点を含む周辺映像を撮影する。第2カメラユニットは、第2イメージセンサーを備え、上記メインフレームに対して水平回転及び垂直回転できるように設置される。好ましくは、上記メインフレームは、外周面から外部へ突出しており、その前面が外側の下方に向かう支持突出部を備え、上記広角レンズは、支持突出部の前面に取り付けられることができる。 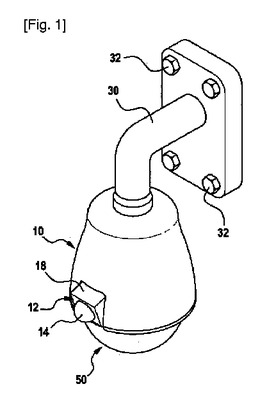 (もっと読む)
(もっと読む)
情報処理装置、情報処理プログラム、情報処理システムおよび情報処理方法
【課題】適切な書類の撮影データを取得する。
【解決手段】第1の撮影部121によって書類3を撮影して生成された第1の画像データ11aを、取得する第1の取得手段21と、第2の撮影部122によって書類3を撮影して生成され、第1の画像データ11aで撮影された書類3の少なくとも一部が重複する第2の画像データ12aを、取得する第2の取得手段22と、第1の画像データ11aと第2の画像データ12aの重複部分のうち、背景色の多い背景エリアを特定し、特定されたエリアにおいて第1の画像データ11aと第2の画像データ12aとを結合して新たな画像データを生成する接合手段24と、を備える。
(もっと読む)
画像処理方法及び装置、並びに画像撮像装置
【課題】出力画像を複数のブロックに区切り、各ブロックの頂点に対応する入力画像上の座標値を記憶したルックアップテーブルを利用して、入力画像に対して画像変形された出力画像を取得する画像処理方法において、出力画像に不連続点が存在する場合にも、容易に所望の出力画像を取得できるようにする。
【解決手段】ルックアップテーブルに、少なくとも一部のブロックの少なくとも一部の頂点については、入力画像上の複数の座標値を記憶しておき、それから所望の座標値を選択して補間演算に利用するようにする。具体的には、ルックアップテーブルの各アドレスは、入力画像上の座標値、別途座標値への参照アドレス、該参照アドレスへの有効・無効を示すフラグを含み、該フラグが無効を示す場合には、当該アドレスの座標値を選択し、有効を示す場合には、参照アドレスで示されるアドレスの座標値を選択するようにする。
(もっと読む)
画像処理装置および画像処理方法
【課題】被写体を分割撮影した複数の撮影画像を結合する際に、撮影時のカメラ位置を適切に推定できないと、適切な結合結果が得られない。
【解決手段】各撮影画像に対し、撮像装置の撮影時の位置情報に応じたレンズ収差補正およびパース補正を施して結合用画像を生成する(S704,S707)。さらに、該結合用画像と、隣接する既生成の結合用画像との重複領域における画素値の差分を示す情報を評価値として算出する(S705,S708)。そして、該評価値が最小となるようなカメラ位置を推定し(S710)、該推定されたカメラ位置に応じたレンズ収差補正およびパース補正を施すことによって、当該撮影画像の結合用画像を、隣接する既生成の結合用画像と結合する(S712)。
(もっと読む)
カメラモジュール及び画像処理装置
【課題】カメラモジュールの薄型化及び小型化と、十分な被写界深度での高感度な撮影とを可能とするカメラモジュール及び画像処理装置を提供すること。
【解決手段】被写体像を撮像する撮像素子13と、被写体から取り込まれた光を撮像素子13へ入射させる撮像レンズ14と、を備える複数のサブカメラモジュールを有し、複数のサブカメラモジュールのうちの少なくとも二つは、ベストフォーカスとなるときの、サブカメラモジュール及び被写体の間の被写体距離を互いに異ならせた撮像レンズ14を備える。
(もっと読む)
光学部材に起因する画質の低下を補正可能な撮像装置、撮像装置の制御方法および不揮発性記憶媒体
【課題】撮影レンズの状態の変化に対して、ユーザに違和感を与えない補正画像を得ることができる撮像装置を提供する。
【解決手段】撮像装置は、撮影レンズを通過した被写体の光学像を光電変換して画像データとして出力する撮像手段と、撮影時に撮影レンズの状態を取得する取得手段(S402)と、撮影レンズの特性情報と取得手段により取得した撮影レンズの状態に基づいて、撮影レンズの特性に起因する画像劣化を補正するための補正値を算出する算出手段(S403)と、算出手段により算出された第1の補正値βと前フレームで算出手段により算出された第2の補正値αとに基づいて、補正値の適用率を設定する設定手段(S404)と、第1の補正値β、第2の補正値α及び適用率を用いて第3の補正値γを再算出する再算出手段(S408)と、第3の補正値に基づいて、画像データを補正する補正手段(S409)と、を備える。
(もっと読む)
撮像装置及びその制御方法
【課題】 離散的なデータから光学的な要因による画質劣化を補正するための補正量を算出する際、動画撮像時と静止画撮像時のそれぞれに適した補正量の算出を可能とする。
【解決手段】 光学補正データベースに、撮像光学系の複数の光学パラメータの値の複数の組み合わせについて、像高に対する撮像光学系に起因する画質劣化を補正するための補正量を離散的に保持しておく。そして、撮像装置の撮像モードが動画モードであれば、静止画モードの場合よりも、像高の数より光学パラメータの組み合わせの数を優先して複数の補正量を選択する。
(もっと読む)
画像処理装置及び画像処理方法
【課題】広角歪を低減することが可能な画像処理装置を提供する。
【解決手段】画像処理装置は、画像処理によって撮影された被写体の画像の歪曲収差を補正する歪曲補正部3aと、軸外の位置に前記被写体Vの顔がある場合に前記軸外の位置に対して歪曲補正部が与える歪曲収差の補正量を前記軸外の位置に被写体の顔がない場合の歪曲補正部による歪曲収差の補正量よりも小さくする補正量低減部6aと、を有する。
(もっと読む)
傾斜又は遠近修正能力を有する画像捕獲装置
画像捕獲装置において傾斜及び/又は遠近歪を修正するための方法及び装置が開示される。ある実施形態では、この方法は、物体に対する画像捕獲装置の相対的な位置に関連した方向測定値を読み取り、その方向測定値がスレッシュホールド未満であるかどうか決定し、そして方向測定値がスレッシュホールド未満である場合に、画像捕獲装置により得られた画像を修正することを含む。ある実施形態では、装置は、画像センサと、画像センサに結合されたメモリと、画像センサに結合された方向測定装置と、画像センサに結合された距離測定装置と、を備え、加速度計からの測定値及び距離測定装置からの測定値と共に画像データがメモリに記憶される。 (もっと読む)
撮像装置及びその制御方法
【課題】歪曲補正と回転ブレの補正を行う際に、撮像された画角の情報を有効に利用する。
【解決手段】回転を補正する際に、歪曲補正時に参照する領域が、撮像された撮像画像の領域内に収まるように、回転を補正する方向に検出された回転量分、回転させる。そして、参照する領域内に含まれる撮像画像に対して歪曲補正を適用することにより、撮像画像と同じ大きさの矩形画像を得る。また、検出された回転量分の回転を行うと、参照する領域が撮像画像の領域に収まらない場合は、撮像画像の領域内に収まる最大の角度の分だけ参照する領域を回転させ、参照する領域内に含まれる撮像画像に対して歪曲補正を適用する。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】高品質のパノラマ画像を容易に生成できるようにする。
【解決手段】動き補償パラメータ算出部303は、撮像方向を順次変化させて撮像を行った撮像装置の相対的な動きを補償するパラメータを算出する。第1接続ライン設定部305は隣接する撮像画像の重複領域における撮像方向の変化方向に対する中央位置を第1接続ラインとする。動被写体検出部306は重複領域における動被写体を検出して被写体情報を生成する。被写体情報射影部307は、被写体情報をスイープ軸に射影する。第2接続ライン設定部308は、射影された被写体情報に基づいて第2接続ラインを設定する。
撮像条件検出部304は、撮像画像間の2次元の回転を生じる撮像条件を検出する。接続ライン選択部309は、検出された撮像条件に応じて、第1接続ラインまたは第2接続ラインを隣接する撮像画像の接続ラインとする。
(もっと読む)
撮像装置および画像処理プログラム
【課題】画像から適切な特徴量を抽出して、画像の正確な検索や編集を行う。
【解決手段】レンズを介して被写体を撮像して画像を生成する撮像部を備え、被写体毎の形状情報を予め記憶する形状記憶部と、撮像部により生成した画像の幾何学的な歪みを、レンズ情報に基づいて補正する画像補正部と、画像補正部による補正後の画像から、画像に含まれる被写体の形状情報を抽出する形状抽出部と、形状抽出部により抽出した形状情報と形状記憶部に記憶された形状情報とに基づいて、画像に含まれる被写体の種類を特定する特定部と、撮像部により生成した画像と、特定部により特定した被写体の種類とを関連付けて記録する記録部と、被写体の種類に基づいて、記録部に記録された画像から所定の特徴を有する画像を抽出する画像抽出部とを備え、画像補正部は、静止画撮影により得られる画像よりも低画素数の画像に対して収差補正を行うことにより、幾何学的な歪みを補正する。
(もっと読む)
撮像装置及びその制御方法、レンズ装置及びその制御方法、並びにプログラム
【課題】レンズ装置と撮像装置本体間の光学補正データの転送を効率良く行い、且つ精度良く光学補正を行う。
【解決手段】ある一つの光学条件に対応した光学補正データを複数回に分けて交換レンズ100からカメラ本体200に転送し、前記光学補正データの中でカメラ本体に転送されていないものがある場合に、カメラ本体に転送済みの光学補正データを補間して、光学補正処理に用いる光学補正データを生成する。
(もっと読む)
画像処理方法、画像処理装置、撮像装置および画像処理プログラム
【課題】画像回復処理によるノイズの増幅等を抑制して、高画質の回復画像を得る。
【解決手段】画像処理方法は、撮像系により生成された入力画像gmを取得するステップと、入力画像の振幅成分および位相成分を回復処理することで第1の画像fd1mを生成するステップと、入力画像の振幅成分を回復処理せずに位相成分を回復処理することで、第1の画像と位相成分の状態が等しく、かつ振幅成分の状態が異なる第2の画像fd2mを生成するステップと、第1および第2の画像の差分情報Smを取得するステップと、回復処理における回復度合を調整するための回復強度調整係数μを設定するステップと、第2の画像に対して、差分情報を、回復強度調整係数に応じて合成することで回復調整画像fmを生成するステップとを有する。
(もっと読む)
画像処理装置、画像処理方法及びコンピュータプログラム
【課題】キャリブレーションパターン画像の撮像の手間を簡略化することができるとともに、より広い領域にて高い精度でディストーション補正をすることができる画像処理装置、画像処理方法、及びコンピュータプログラムを提供する。
【解決手段】撮像手段でキャリブレーションパターン画像を取得し、取得したキャリブレーションパターン画像に基づいてキャリブレーションを実行してディストーション補正する。撮像手段で撮像することが可能な撮像範囲に配置した特徴点が一定の間隔を有する複数のキャリブレーションパターン画像を取得し、それぞれ特徴点群を抽出する。撮像範囲の互いに異なる領域にてそれぞれ抽出した特徴点群に基づいて、キャリブレーションを実行する。
(もっと読む)
画像処理装置、画像処理方法及びコンピュータプログラム
【課題】本発明は、画像処理装置、該画像処理装置で用いる画像処理方法、及び該画像処理方法における処理をコンピュータに実行させるコンピュータプログラムを提供する。
【解決手段】本発明は、撮像対象物をカメラ1で撮像した多値画像に対する画像処理を実行する場合に、画像処理前の多値画像を射影変換するための所定の射影変換パラメータを算出する。算出した射影変換パラメータに基づいて、画像処理前の多値画像の画素が存在する領域を画像処理後の多値画像の画素が存在する出力領域へ射影変換して得られる射影領域を算出し、算出した射影領域と画像処理後の多値画像の画素が存在する出力領域とが重なる領域を有効領域として特定する。特定した有効領域と、算出した射影変換パラメータとに基づいて座標変換を行い、画像処理前の多値画像から画像処理後の多値画像を生成する。
(もっと読む)
撮像装置
【課題】フォーカルプレーン歪み(FP歪み)を安定的に補正する。
【解決手段】撮像装置は、CMOSイメージセンサを用いて得られた入力画像のFP歪み及び手ぶれを補正して出力画像を生成する。前回の入力画像及び今回の入力画像350間のオプティカルフローに基づき、手ぶれによる画像ぶれが打ち消されるように入力画像350上の基準枠351の位置を調整する。入力画像350のFP歪みを除去するための歪み補正ベクトルを上記オプティカルフローから導出し、歪み補正ベクトルに基づいて基準枠351を変形することで抽出枠352aを設定する。抽出枠352aが入力画像350内に収まらない場合、抽出枠352aが入力画像350内に収まるように歪み補正ベクトル及び抽出枠を修正し、修正後の抽出枠352b内の画像から出力画像を生成する。
(もっと読む)
161 - 180 / 698
[ Back to top ]