
Fターム[5C122FH06]の内容
Fターム[5C122FH06]に分類される特許
101 - 120 / 698
会議システム、監視システム、画像処理装置、画像処理方法及び画像処理プログラム等
【課題】広範囲な画角で撮像された魚眼歪画像等に基づいて正確かつ実効的な物体認識を行うことが可能な会議システム、監視システム、画像処理装置、画像処理方法及び画像処理プログラム等を提供する。
【解決手段】魚眼レンズによって撮像された魚眼歪画像Sに基づいて生成された二次元的に視認可能な平面正則画像等の任意の点任意の点Ci(ui、vi)の選択指示を受け付けると、Ci(ui、vi)の対応座標としての魚眼歪画像S上の点Si(xi、yi)を算出し、Ci(ui、vi)を中心として、当該魚眼歪画像Sを構成する画素情報群に基づいて、平面正則画像を構成する画素情報群を新たに生成する。
(もっと読む)
広角撮影画像へのスーパーインポーズ方法および装置

【課題】魚眼撮影で得られる全方位画像から、閲覧者の視線方向の一部分を表示する際に、単純かつ効率的にテロップなどの補助情報をスーパーインポーズする。
【解決手段】魚眼レンズで全方位外景を撮影し、歪曲円形画像Dを包含する矩形の撮影画像を得る。スーパーインポーズの対象となる補助画像Aを4分割して分割画像α,β,γ,δを作成し、撮影画像の4隅の余白領域に埋め込み、統合画像Cを作成する。再生時には、閲覧者が指定した視線方向に基づいて、歪曲円形画像Dから特定の表示対象部分画像Eを切り出し、これを正則矩形画像Tに変換する。一方、四隅の余白領域から4枚の分割画像α,β,γ,δを抽出して元の補助画像Aを復元し、正則矩形画像Tに重畳してスーパーインポーズし、表示用画像Sを作成する。動画コンテンツを作成する場合は、フレームごとに統合画像Cを作成し、フレーム単位で上記処理を実行する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】被写体領域を撮像画像から簡便に、且つ、適正に抽出する。
【解決手段】撮像装置100であって、撮像画像P1の非平坦度を演算する画像領域特定部8aと、演算された撮像画像P1の非平坦度が所定値以下である画像領域の範囲が所定の範囲以上か否かを判定する画像判定部8bと、その範囲が所定の範囲以上であると判定された場合に、この範囲の画像領域の情報に基づいて、撮像画像P1から被写体Sが含まれる被写体領域を抽出するための抽出用背景画像を生成する背景生成部8cと、抽出用背景画像と撮像画像P1との差分情報に基づいて、撮像画像P1から被写体領域を抽出する切抜画像生成部8eとを備えている。
(もっと読む)
撮像装置、撮像システム及び撮像方法
【課題】ユーザが特に注視したい局所的な箇所と、その箇所の周囲全体の画像を容易に確認できるようにする。
【解決手段】イメージセンサ11が画像信号を生成し、画像信号による画像を切り出す範囲を設定する設定値により特定される特定の領域に対応して第1の領域の内部に第2の領域を画像記憶部132に設定する。画像変換処理部131は、画像信号を書き込むフレームを1フレーム毎に異ならせて第1の領域に全体画像に対応する第1の画像信号、又は、全体画像の一部に相当する部分画像に対応する第2の画像信号を異なるフレーム期間で交互に書き込む。そして、第2の領域に第1の領域に書き込んだ画像信号とは異なる画像信号を、この画像信号のフレーム期間で書き込む。アナログエンコーダ18は、第1及び第2の領域から連続走査タイミングで読み出した第1及び第2の画像信号を所定の方式の画像信号に変換して出力する。
(もっと読む)
画像処理装置及び画像処理方法
【課題】必要な領域を高解像度で表示しかつ画像歪みを補正可能とする画像処理装置を提供する。
【解決手段】レンズと撮像素子を含み、被写体を撮像する広角度のカメラと、カメラで撮像した画像をもとに特定の領域が広く見えるように歪ませた第1の画像を取得する画像処理部と、カメラによって複数の向きの方眼画像を取得する方眼画像取得手段と、方眼画像の格子点を取得し、取得した複数の格子点を用いて、画像処理部からの第1の画像をn次式で引き伸ばし補正する歪補正手段と、歪補正手段によって補正した画像を表示する表示部と、を具備する。
(もっと読む)
撮像装置および画像処理装置
【課題】複数のフレーム画像を用いずにローリングシャッタ歪みを補正する。
【解決手段】撮像装置は、複数の光電変換素子が第1方向と、第1方向と交差する第2方向とに配列され、ローリングシャッタ方式で電荷蓄積を行う撮像素子14と、第2方向の奇数番目に配列された素子列と、第2方向の偶数番目に配列された素子列との一方については撮像素子の撮像面の上方から、他方については撮像面の下方から、交互に画像信号を読み出す読出手段と、第2方向に隣接する2個の素子列から出力された画像信号をそれぞれ比較して、撮像面に対して相対移動を行う移動被写体像についてずれに関する量を算出する算出手段と、算出手段により算出されたずれに関する量に基づいて、移動被写体像に発生するローリングシャッタ歪みを補正する補正手段とを備える。
(もっと読む)
交換レンズ、カメラボディおよびカメラシステム
【課題】光学特性の情報を記憶する光学特性記憶手段で必要とする記憶容量を抑制しつつ、カメラボディにおける周辺減光の補正処理の精度確保に十分な情報を提供する。
【解決手段】カメラボディに着脱可能に取り付けられる交換レンズであって、少なくとも交換レンズの周辺減光についての情報を含む交換レンズの光学特性の情報を記憶する光学特性記憶手段と、光学特性記憶手段が記憶した光学特性の情報をカメラボディに送信する光学特性送信部とを備え、光学特性記憶手段は、交換レンズの周辺減光についての情報として、略矩形の撮像範囲の中心から撮像範囲の四隅までの像高の6分の1に相当する像高をy1としたときに、中心からの像高がy1の2以上6以下の整数倍となる位置における周辺減光の情報を記憶することを特徴とする交換レンズ。
(もっと読む)
撮像モジュール、撮像装置および製造方法
【課題】像面倒れによる結像特性への影響を低減すること。
【解決手段】撮像モジュールは、光軸位置が同一直線上にない3以上のレンズを少なくとも含む複数のレンズを有するレンズ部と、複数のレンズがそれぞれ被写体像を形成する同一の撮像平面上の受光領域に、それぞれ複数の受光素子が形成された受光部と、3以上のレンズの光軸に対する撮像平面の傾きに基づく画像処理パラメータを用いて、複数のレンズの少なくともいずれかを通じて撮像された撮像画像に、撮像平面の傾きに応じた画像処理を施す画像処理部とを備える。
(もっと読む)
電子カメラ
【課題】ucodeなどの符号を簡便に取得する。
【解決手段】撮影光学系を介して被写界を撮像する撮像部と、撮像部により撮像された被写界に符号51が含まれるか否かを判定するする符号判定部と、符号判定部により被写界に符号51が含まれると判定された場合に、撮像部により撮像された被写界と符号51を含む領域の画像とを記録媒体へ記録させる記録制御部とを備える。
(もっと読む)
画像処理装置及びそれを用いた撮像装置
【課題】特別な設備を必要とせず、簡易且つ精度良くキャリブレーションができる画像処理装置及びそれを用いた撮像装置を提供する。
【解決手段】少なくとも2台のカメラ4a,4bを具備し、各カメラから得られる画像の領域の対応関係を求める対応領域算出部23と、各カメラから得られる画像の対応領域から得られる情報の一致度を求める一致度算出部24と、一致度算出部が算出した一致度をもとにカメラパラメータを求めるカメラパメータ算出部25を具備する。
(もっと読む)
証明書類撮影用カメラ、融資審査装置及び融資審査方法
【課題】 証明書類を確実に撮影し、それを画像データとして貸金業者の融資審査装置に送信した場合に、必要な情報を確実に読み取ることができるようにする。
【解決手段】 証明書類撮影用カメラ10が、収入証明書類等の証明書類における各記載項目を区分するための枠線50のうち、少なくとも一部の枠線に合致する撮影フレーム110を、ファインダー10aに表示させる撮影フレーム表示手段100を有している。顧客は、ファインダー10aに表示される撮影フレーム110を、証明書類中の所定の枠線に合致させて撮影すれば、氏名や年収などの必要なデータが含まれた画像データが確実に撮影されることになる。この画像データを融資審査装置20に送信すれば、融資審査装置20において融資審査に必要なデータを確実に読み取ることができ、証明書類の撮影による顧客負担を大幅に増大させることなく必要な証明書類を容易に取得できる。
(もっと読む)
画像補正装置および画像補正方法ならびにそのプログラム
【課題】既に撮影されたフォーカルプレーン歪を有する撮影画像を再生する際に、そのフォーカルプレーン歪を補正することのできる画像補正装置を提供する。
【解決手段】動画ストリームデータに含まれる動きベクトルの始点に対応する走査線番号を検出し、動画ストリームデータにおいて撮影時刻の時間差STを有する連続する2つの画像のうちの前画像の前記走査線番号に対応する走査線nの露出時刻を2つの画像のうちの後画像の最上位の走査線の露出時刻に合わせる補正時間の、時間差STに対する割合を、動きベクトルに対して乗じることにより、動きベクトルを補正する。
(もっと読む)
画像処理装置
【課題】垂直化変換及び平行化変換の両変換を保つ画像を生成することができる画像処理装置を提供する。
【解決手段】実施形態の画像処理装置は、複数の撮像部と、校正部と、を備える。複数の撮像部は、それぞれの光学中心を結ぶベースラインベクトルと平面の法線ベクトルとが直交するように配され、重複する領域を撮像する。校正部は、撮像された複数の画像を校正して、前記複数の画像それぞれのレンズ歪みが補正され、前記複数の画像の間で、対応する画像内の位置が水平に一致され、かつ平面に垂直な面に合わせられた複数の校正画像を得る。
(もっと読む)
画像処理装置、画像表示システム及び画像表示方法
【課題】画角が狭い画像を取得するための専用のカメラがなくても、合成画像と画角が狭い画像とのいずれも生成する。
【解決手段】画像表示システムの画像処理回路3においては、画像合成部32が、複数の撮影画像P1〜P4に基づいて、仮想視点からみた車両9の周辺の領域を示す合成画像CPを生成する。一方で、歪補正部33が、複数の撮影画像P1〜P4のうちの一の撮影画像P4の一部の領域の歪みを補正して、一の撮影画像P4より画角が狭い歪補正画像RPを生成する。このため、画角が狭い画像を取得するための専用のカメラがなくても、合成画像と画角が狭い歪補正画像とのいずれも生成することができる。
(もっと読む)
撮影機器
【課題】被写体に関連する情報を的確に表示することができる撮影機器を提供する。
【解決手段】デジタルカメラ1は、被写体を撮影した撮影画像を表示する表示部18と、デジタルカメラ1の位置情報及び方位情報に基づき、データベース16aから被写体に関連した情報及び被写体周辺に関連した情報を読み出す信号処理及び制御部11と、レンズ条件に応じて、被写体に関連した情報を選択するともに、撮影画像に選択した情報を重畳して表示部18に表示するように制御する表示制御部11bとを有する。
(もっと読む)
撮像装置およびプログラム
【課題】歪み補正で生じた撮影画像中の変形箇所を自動的に確認できる撮像装置を実現する。
【解決手段】画像処理部14は、制御部10の制御の下に、例えば名刺やホワイトボードなどの被写体を撮像した撮影画像に歪み補正(レンズ収差補正又は台形補正)を施して補正画像を生成する。制御部10は、生成された補正画像中から変形率が閾値より高い領域を検出し、該当する領域を順次拡大表示する。つまり、歪み補正により文字が変形したりボケてしまったりする可能性の高い箇所を順番に拡大表示する為、歪み補正で生じた撮影画像中の必要箇所だけを自動的に確認することが可能になる。
(もっと読む)
画像処理装置、撮像装置、及び画像処理方法
【課題】撮像画像データのディストーション補正の際のメモリからの画素データ読出しを高速化し、スループットを向上させる。
【解決手段】
撮像画像データにおける第1の座標位置の画素データをメモリの第1の行アドレスと第1の列アドレスとで指定される記憶領域に格納し、前記撮像画像データの中心で直交する水平軸、垂直軸について第1の座標位置と対称な第2の座標位置の画素データを前記メモリの前記第1の行アドレスと第2の列アドレスとで指定される記憶領域に格納する画素データ格納制御部を備えた画像処理装置は、理想座標位置に対応する第1の補正前座標位置を求め、当該第1の補正前座標位置に対応する行アドレスから、水平軸、垂直軸について対称な複数の画素データを読出して、水平軸、垂直軸について対称な複数の理想座標位置に配置することでディストーション補正を行うので、メモリから高速にデータを読み出して、スループットを向上させることができる。
(もっと読む)
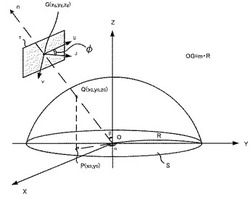
画像補正装置、補正画像生成方法、補正テーブル生成装置、補正テーブル生成方法、補正テーブル生成プログラムおよび補正画像生成プログラム
【課題】補正後の画像における違和感を低減ないし解消することを課題とする。
【解決手段】前記課題を解決するために、本発明の画像補正装置10は、画像入力部11と、画像記憶部12と、補正テーブル記憶部15と、画像記憶部に記憶された入力画像を補正テーブルに基づいて幾何補正する幾何補正部13と、幾何補正部により補正された入力画像を補正画像として出力する画像出力部14と、を備え、補正テーブル17は、補正画像となる出力画像上の各画素位置に対応する角度の組(θ、φ)を算出し、入力画像の投影中心を原点とする3次元直交座標系において、YZ平面をY軸の周りにθだけ回転させた平面と、XZ平面をX軸の周りにφだけ回転させた平面との交線に基づいて光線方向を算出し、光線方向に対応する入力画像上の位置を抽出位置として算出し、抽出位置を出力画像の画素位置に対応付けていることにより生成されたものであることを特徴とする。
(もっと読む)
画像処理装置、画像処理方法、プログラム、記録媒体
【課題】歪曲収差と遠近感のバランスがとれた画像を生成する。
【解決手段】画像を取得する画像取得部と、前記画像の内容について示す画像情報を取得する情報取得部と、前記画像情報に基づいて、前記画像の歪みの一部を残すように補正する補正部と、を有することを特徴とする画像処理装置を提供する。例えば、前記画像情報が、前記画像の内容は会議であることを示す場合には、前記補正部は、前記歪みの水平方向成分を全て解消し、前記歪みの垂直方向成分を所定量残すように補正する。
(もっと読む)
画像処理方法および画像処理装置
【課題】歪み補正後の絵柄の形状が折れ線状にならず、滑らかに変化する形状に補正可能な画像処理方法および画像処理装置を提供する。
【解決手段】歪み補正後画像の着目画素を表す極座標の角度OTより、着目画像を間に挟む2軸に設定された歪み量テーブルA,Bを選択し、距離ORに応じた歪み量A,Bを算出する。角度OTの三角関数から補間係数を求めて歪み量A,Bを補間し、補間歪み量Cを用いて距離ORを補正する。角度OTと補正した距離IRとで表される極座標を直交座標に変換して、歪み補正前画像の着目画素を表す参照座標を得る。
(もっと読む)
101 - 120 / 698
[ Back to top ]