
Fターム[5C122FH06]の内容
Fターム[5C122FH06]に分類される特許
21 - 40 / 698
画像処理方法、画像処理装置、撮像装置、および、画像処理プログラム
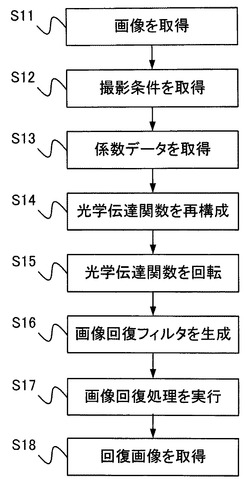
【課題】画像回復処理に必要な情報量を低減しつつ、高精度な画像回復処理を実行可能な画像処理方法を提供する。
【解決手段】撮影画像の画像回復処理を行う画像処理方法であって、撮影画像の撮影条件に応じた係数データを用いて、撮影画像の位置に応じた複数の撮像光学系の第1の光学伝達関数を生成する工程と、第1の光学伝達関数を撮影画像の中心または撮像光学系の光軸の周りに回転させて複数の第2の光学伝達関数を生成する工程と、第1の光学伝達関数および前記第2の光学伝達関数に基づいて画像回復フィルタを生成する工程と、画像回復フィルタを用いて撮影画像の画像回復処理を行う工程とを有する。
(もっと読む)
動画提示装置

【課題】歪曲広角画像上で任意の追跡対象物を自動追跡する。
【解決手段】魚眼撮影した歪曲広角画像Sを、メモリ130内にフレーム単位で入力する。変換部150は、格納部170内の切出条件に基づき、歪曲画像Sの点Pの位置から、φで示される向きに、サイズmの画像を切り出し、正則画像Tに変換してメモリ140に格納する。追跡開始点Qを含む追跡開始指示が与えられると、フラグ設定部220はフラグをONにし、点Qが新たな点Pになるよう更新する。基準色抽出部200は、新たな点Pの近傍色を基準色αとして抽出し、基準色格納部190に格納する。近隣ブロック抽出部160は、点Pの近傍ブロックを抽出し、ブロック選択部180は、基準色αに近似する画素数が最大となるブロックを選択する。自動変更部210は、選択ブロック内の基準色αに最も適合する色をもつ候補領域の中心点を新たな点Pとする更新を行う。
(もっと読む)
撮像装置
【課題】保護部材の厚さにばらつきが存在する場合であっても、保護部材に起因する光学的な収差が適切に補正された高品質な画像を高速に取得することが可能な技術を提供する。
【解決手段】撮像装置が、結像光学系および撮像部を有する撮像ユニットと、前記撮像ユニットで試料を撮像する前に、光学的な収差又は該収差の要因となる物理量を前記試料上の複数の領域ごとに計測する計測部と、前記収差を補正するために前記結像光学系の光路中に挿入される光学素子であって、補正量の異なる複数の光学素子と、前記計測部の計測結果に基づいて前記複数の光学素子の中から光学素子を選択し、前記撮像部で前記試料を撮像する際に前記結像光学系の光路中に前記選択された光学素子を挿入する制御部と、を備える。前記結像光学系は、前記複数の領域の像を前記撮像部に同時に形成できるように構成されている。
(もっと読む)
画像処理装置及び画像処理方法
【課題】レンズ特性により画像劣化が画面内位置で異なる場合にも、各位置の劣化状態に応じて最適に復元処理を行うとともに、演算量を大幅に低減すること。
【解決手段】分散値テーブルは、画面内の各格子点でのPSF係数の分散値を格納し、PSF係数テーブルは、分散値とPSF係数の対応関係を格納する。これらの値は、画面水平方向と画面垂直方向の成分に分けて格納する。分散値算出部は、分散値テーブルを参照して処理対象画素での分散値を求め、PSF係数算出部は、PSF係数テーブルを参照して処理対象画素のPSF係数を出力する。水平及び垂直コンボリューション処理部は、水平及び垂直方向のPSF係数を用いて水平及び垂直方向の畳み込み演算を行い、劣化画像を復元する。
(もっと読む)
全方位撮像装置及び全方位撮像方法
【課題】全方位画像に対してパノラマ展開画像や平面透視投影画像へ変換する際に、変換画像と同時に表示をしている方角の方位情報の表示をリアルタイムに行なうことができるようにする。
【解決手段】全方位の画像を撮像する手段を持つ全方位撮像手段と、方位情報を取得する方位取得手段と、装置全体の動作を制御する制御手段とを備え、前記制御手段は全方位撮像手段によって撮影された全方位画像の画面のある基準となる方向についての方位情報を、方位取得手段によって取得してメタデータとして全方位画像情報に付属することにより、撮影された全方位画像からパノラマ展開や平面透視投影変換された画像に対して、方位情報を容易に得られるようにする。
(もっと読む)
カメラシステム及び交換レンズユニット
【課題】湾曲した撮像素子を備える交換レンズユニットによって取得した画像を簡易かつ適正に補正することができるカメラシステムを提供すること。
【解決手段】交換レンズユニット100が、個別に湾曲情報記憶部161を有し、湾曲情報記憶部161に記憶された湾曲情報を送信部であるレンズ側通信部170を介してカメラ本体200に送信する。カメラ本体200では、画像処理部210がレンズ側撮像素子120によって得た画像データに対して補正を含む画像処理を行うので、交換レンズユニット100に設けた湾曲した検出面121で検出した画像が湾曲に起因する特殊な歪等を有するものであっても、このような画像を簡易かつ適正に補正した画像を得ることができる。これにより、湾曲型のレンズ側撮像素子120を有する交換レンズユニット100の特性を生かした画像の取得が可能になる。
(もっと読む)
撮像装置
【課題】コストをかけず簡単に非等方性の収差が補正された画像を得る。
【解決手段】撮像装置は、被写体の光を集光する撮像光学系(10a)と、前記撮像光学系を通過した光を受光して、被写体像に関連する複数の画像を生成可能にする撮像素子(10b)と、前記複数の画像の前記撮像光学系に対する像面位置を設定する像面位置設定部(10f、204a)と、収差の補正された補正画像を前記複数の画像の画素値に基づいて生成する収差補正部(24)と、を備える。前記複数の画像は、少なくとも一部で一方向の収差が他方向の収差より小さい第一画像と、少なくとも一部で前記他方向の収差が前記一方向の収差より小さい第二画像を含む。
(もっと読む)
画像処理システム
【課題】球面収差復元用の復元フィルタを補正した補正フィルタでボケを復元する。
【解決手段】撮像装置100は撮影光学系110により結像された結像画像を用いて再生画像を作成する。撮像装置100は再生画像のボケを復元する。再生画像のボケの度合いは方向に応じて異なる。撮像装置100はEEPROM107とDSP103とを有する。EEPROM107は復元フィルタを補正した補正フィルタを格納する。DSP103は補正フィルタにより再生画像のボケを復元する。
(もっと読む)
端末装置、撮像方法およびプログラム
【課題】撮像した画像に対し、状況に応じた適切な補正を行って出力することのできる端末装置、撮像方法およびプログラムを提供する。
【解決手段】カメラで撮像した画像を取得し(S10)、顔、ホワイトボード、特定対象物の検出を行う(S12)。また、顔、ホワイトボード、特定対象物の順に高い優先順位を設定する。ホワイトボードの状態に変化があれば(S26:YES)、ホワイトボードの優先順位を高順位に設定する(S28)。特定対象物がズームされたら(S30:YES)、特定対象物の優先順位を高順位に設定する(S32)。優先順位が最上位の対象物に応じた補正方法を決定し、その補正方法で画像の補正を行い(S34)、他の拠点に送信する(S36)。
(もっと読む)
画像入力装置、会議装置、画像処理制御プログラム、記録媒体
【課題】カメラの高さの変化を含んだ任意の位置での画像処理が可能な画像入力装置を提供すること。
【解決手段】被写体を撮影するカメラ本体77と、被設置面に設置される筐体2と、カメラ本体77をチルト可能に支持させると共に、筐体2に上下方向へ揺動可能に支持されたアーム部71と、第1及び第2の加速度センサS1、S2を備えアーム部71とカメラ本体77の傾きを検出させる傾き検出部Sと、傾き検出部Sが検出した傾きと当該装置の寸法情報とに基づいて、被設置面からカメラ本体77までの高さ高さ距離情報Lを算出し、その算出した高さ距離と傾き検出部Sが検出したカメラ本体77の傾きとからカメラ本体77が撮影する被写体の種類を特定し、その特定した種類の被写体に適した画像処理を実行する制御部を備えて画像入力装置を構成する。
(もっと読む)
画像変形方法及び画像変形装置
【課題】画像の変形処理において、入力画像バッファのサイズを小さくする。
【解決手段】画像変形方法は、変形前画像の走査線方向に第1ピッチで、且つ垂直走査方向に第2ピッチで配置された領域隅点によって囲まれた複数の領域を設定する工程と、複数の領域の各々に対して0個以上のサンプリングポイントを設定する工程と、サンプリングポイントの個数と、各サンプリングポイントを特定する識別子と、変形後画像において各サンプリングポイントに対応する画素とを対応づける変形データを生成する工程と、変形前画像の画像データを読み込んで入力バッファに格納する工程と、変形データに基づいて画像データを変更することにより変形後画像を生成する工程とを備える。
(もっと読む)
広角歪補正処理を有する画像処理方法、画像処理装置及び撮像装置
【課題】比較的小規模な回路で、歪み補正処理に関して被写体の正確な認識を図る。
【解決手段】歪み補正係数には、少なくとも、光学系110のレンズの物理的特性及び前記光学系への設定された仮想投影面VPからの入射光の入射角に基づいて算出された第1歪み補正係数と、前記光学系への入射角の正接関数を変数として算出される撮像素子と前記光学系の光軸とが交わる光学中心からの像高である第2歪み補正係数が含まれており、歪み補正係数の値が所定の上限値を超えることで飽和する入射角の領域で算出される画像データを予め定められた所定の値に変換する。
(もっと読む)
カメラキャリブレーション装置
【課題】車両の停車誤差の影響を排除できるキャリブレーションを簡易な設備で実施する。
【解決手段】自車12の形状に対応した2点と交わる線を含み、カメラ10の撮像範囲内に少なくとも2本配置される参照線RLと、この参照線RLの間に予め定められたパターン形状を有する校正用パターンPPとを有する測定領域MAと、画像処理部14とを備えている。そして、画像処理部14が、カメラ10で校正用パターンPP及び参照線RLが配置される測定領域MAを撮影することで前記測定用画像IMを生成する撮像処理18と、前記2本の前記参照線RLに基づいて前記自車12の停車位置と前記パターン形状との座標関係を停車誤差として算出する停車誤差算出処理20と、当該停車誤差をキャンセルした状態で前記パターン形状に基づいて前記カメラ10の取付姿勢に対応する外部パラメータを算出する外部パラメータ算出処理22とを備えた。
(もっと読む)
撮像装置及びその制御方法
【課題】 光学補正の精度の低下させることなく光学補正に係る演算量及びオーバーヘッドを低減すること。
【解決手段】 撮像素子の電荷蓄積期間において光学系が駆動されたことによる光学系の光学パラメータの変動量を算出し(S503)、その変動量に応じて、電荷蓄積期間における光学パラメータの算出する個数を決定する(S504)。その後、決定された個数だけ、電荷蓄積期間における異なる時刻での光学パラメータを算出し(S507)、算出された各光学パラメータに対応する光学特性を光学データベースから取得し(S508)、取得された各光学特性に基づき補正値を生成して(S510)、その補正値を用いて画像信号を補正する(S511)。
(もっと読む)
画像生成装置、画像生成方法、及びコンピュータプログラム
【課題】 全周囲画像における任意の範囲を切出し範囲として平面画像を生成するための演算処理の負荷を軽減して演算速度を向上させることができる画像生成装置を提供する。
【解決手段】 歪みを有する全周囲画像から切出した切出し範囲を仮想カメラ平面に射影した平面画像を生成する画像生成装置10は、全周囲画像を取得する全周囲画像取得部11と、全周囲画像を複数の分割範囲ごとにそれぞれ対応する中間平面に射影するための変換テーブルを記憶した変換テーブル記憶部13と、変換テーブルを用いて、全周囲画像を分割範囲ごとに中間平面に射影することで、分割範囲ごとの中間平面画像を生成する中間平面画像生成部12と、切出し範囲を指定する切出し範囲指定部15と、切出し範囲の中間平面画像を仮想カメラ平面に射影することで、平面画像を生成する平面画像生成部14とを備えている。
(もっと読む)
車両視覚システムの較正方法および車両視覚システム
【課題】車両視覚システムを提供すること。
【解決手段】車両視覚システムは、非線形ひずみのある画像をその各々が取得する複数の画像センサ(11〜14)を備えている。車両視覚システムを較正するために、画像センサ(11)を用いて複数の物体の画像(22)を取得し、さらに、追加の画像センサ(13)を用いても複数の物体の画像(22)を取得する。画像センサ(11)と追加の画像センサ(13)は、重複する視野(15,17)を有する。複数の物体(20)に対する、画像センサ(11)の位置および配向は、取得された画像に基づいて判定される。複数の物体(22)に対する追加の画像センサ(13)の位置および配向は、追加の取得された画像に基づいて判定される。追加の画像センサ(13)と画像センサ(11)との相対位置および配向は、これらの判定結果に基づいて確立される。
(もっと読む)
撮像装置
【課題】撮像用画素の間に焦点検出用画素が配置された撮像素子を用いて位相差方式の焦点検出を行う場合の、検出精度を向上させる。
【解決手段】撮影光学系により結像された被写体像を撮像する撮像用画素群と、撮影光学系の射出瞳を分割し、該分割された領域からの光束を用いて位相差式の焦点検出を行なうための焦点検出用画素群とを備えた撮像素子と、焦点検出用画素群における隣接画素からのクロストーク成分を補正した所定の信号を算出するとともに、所定の信号により補正された焦点検出用の像信号を用いて焦点検出演算を行なう演算部とを備える。
(もっと読む)
撮像装置及びステレオ撮像装置
【課題】撮像素子の傾きによる画像歪を簡易な構成で、且つ、精度良く補正可能な撮像装置及び該撮像装置を複数用いたステレオ撮像装置を提供する。
【解決手段】本発明に係る撮像装置(1)は、撮像素子(3)が撮像光学系(2)の光軸の位置において焦点が合うように配置されており、画像処理手段(4)は撮像素子の傾きθによる撮像画像の歪を、撮像画像の光軸からの距離をA、歪補正後の撮像画像における光軸からの距離をB、及び、撮像光学系の焦点距離をfを用いた演算式による座標変換を用いて補正することを特徴とする。
(もっと読む)
撮像装置および電子機器
【課題】小型かつ低コストの高解像度で、高画素、広角に対応することが可能な撮像装置および電子機器を提供する。
【解決手段】一群のレンズと、レンズを通して結像される撮像素子と、を有し、レンズは、物体側から像面側に向かって、空気を挟まず順番に配置された、物体側面が物体側に凸形状をした第1レンズと、透明体と、第2レンズと、を含み、撮像素子は、物体側に凹を向けて湾曲している。
(もっと読む)
撮像装置及びその制御方法、並びにプログラム
【課題】不正なデータを含まずに撮像して得られた画像データの手ぶれ及びローリング歪みを低減することが可能な撮像装置及びその制御方法、並びにプログラムを提供する。
【解決部】撮像装置100は、手ぶれによる動き量に応じて、記憶領域に記憶された第1画像データから第2画像データを切り出すことが可能な範囲で、手ぶれを補正可能な切り出し位置を算出し、ローリング歪みを補正するために用いられる記憶領域における範囲を示す範囲情報、及び移動量を算出し、切り出し位置から範囲情報が示す範囲のデータを第1画像データから切り出すことが可能な場合は、切り出し位置をそのまま出力し、不可能な場合は、第1画像データから範囲を切り出すことが可能なように補正した切り出し位置を出力し、出力された切り出し位置から範囲のデータを第2画像データとして取得し、算出された移動量から、取得した第2画像データのローリング歪みを補正する。
(もっと読む)
21 - 40 / 698
[ Back to top ]