
Fターム[5C122HA90]の内容
Fターム[5C122HA90]に分類される特許
221 - 240 / 886
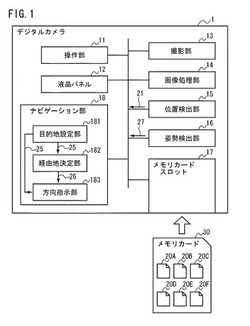
デジタルカメラ
【課題】位置検出機能を備えるデジタルカメラにおいて、位置情報を有効に利用することができる技術を提供することを課題とする。
【解決手段】デジタルカメラ1は、ナビゲーション機能を有する。デジタルカメラ1において、撮影地点を示す位置情報が付加された撮影画像データ20A〜20Fが、メモリカード30に記憶される。目的地設定部181は、操作部11に入力された操作情報に基づいて、撮影画像データ20A〜20Fの中から目的地が撮影された撮影画像データ22Bを選択する。撮影画像データ20Bに付加された位置情報21Bに基づいて、撮影画像データ20Bの撮影地点22Bを目的地として設定する。位置検出部15は、現在地を示す現在地情報21を出力する。方向指示部183は、現在地情報21と、位置情報21B(目的地情報25)とに基づいて、現在地から撮影地点22Bを見た方向を算出し、算出された方向をユーザに指示する。
(もっと読む)
撮像装置

【課題】GPSユニットの位置検出精度が高い撮像装置。
【解決手段】撮像装置であって、被写体像を光電変換する撮像素子と、撮像素子を支持する本体部と、本体部に収納される収納状態と、外部へ展開する展開状態の間で変位する表示ユニットと、表示ユニットに設けられた、位置情報を取得するGPSユニットとを備える。上記撮像装置において、GPSユニットは、表示ユニットが展開状態において、表示ユニットの重心に対して本体部とは反対側に配置されてもよい。
(もっと読む)
画像処理装置、画像処理プログラム及び画像処理方法、並びに移動体
【課題】撮影した画像の閲覧制限を高精度に行う。
【解決手段】判定値算出部28が、パーティクルフィルタの各サンプルの位置姿勢において、地図情報に基づいて閲覧禁止多面体を画像に投影するとともに、閲覧禁止多面体が投影された画素における奥行き値を地図情報に基づいて算出し、各サンプルの位置姿勢において算出された各画素における奥行き値の最小値を、各画素の閲覧禁止奥行き判定値とする。また、判定値算出部28が、各サンプルの位置姿勢において、閲覧禁止多面体を画像に投影したときのサンプルの尤度に基づく値を、閲覧禁止多面体が投影された画素に対して累積して、その累積値を各画素のマスク判定値とする。そして、閲覧画像生成部30が、画像のうち閲覧禁止奥行き判定値が奥行き情報よりも小さい画素で、かつマスク判定値が所定の閾値よりも大きい画素の閲覧を禁止した閲覧画像を生成する。
(もっと読む)
観測装置、観測方法およびプログラム
【課題】全地球測位システムにおける衛星からの電波を受信して位置を特定する際の電力消費を抑制する技術を提供する。
【解決手段】GPS衛星からの送信信号を復調する復調部19に、レプリカ信号生成回路192、相関処理部193、レシーバプロセッサ194、および、ナビゲーションプロセッサ195を設ける。レシーバプロセッサ194による衛星の追尾が行われているときの制御パラメータを制御データ122として退避した後、復調部19に対する電力の供給を停止させて、復調部19における電力消費を抑制する。復調部19に対する電力の供給を再開させるときには、衛星の追尾に成功していたときの制御パラメータ(制御データ122)を読み出して、当該読み出した制御パラメータによって衛星の再捕捉を再開する。
(もっと読む)
画像処理装置
【課題】多くの付帯情報を映像データと多重化すると、映像データのビットレートを落とさなければ、動画処理システム全体のビットレートを維持できなくなるという課題がある。
【解決手段】画像処理装置は、入力された映像データの複数の付帯情報を、それぞれの更新周期に従って複数のオブジェクトに分類し、該分類された各オブジェクトに対応する付帯情報のデータを対応する更新周期に従って生成し出力するよう制御することで、それぞれの更新周期に従って生成、出力される各オブジェクトに対応する付帯情報のデータを入力された映像データと多重化するよう構成される。また、画像処理装置は上記多重化されたデータを映像データと付帯情報とに分離し、分離された付帯情報から更新されるオブジェクトの更新画像データを生成して映像データに対応する画像データと合成する。
(もっと読む)
撮像装置
【課題】例えば電車等の乗物内での盗撮を精度よく抑制することが可能な撮像装置を提供する。
【解決手段】カメラは、撮像レンズを介して受光した被写体の像を撮像する撮像素子と、撮像場所が電車内であるか否かを判定する第1判定手段と、撮像される被写体の位置の明るさと撮像レンズの位置の明るさとの差が予め設定された閾値よりも大きいという条件、被写体を撮像する場合の照明状況が電車内の蛍光灯下の照明状況でないという条件、及び撮像される画像の四隅の明度が予め設定された設定明度よりも低くなっているという条件のうち少なくとも1つの条件が満たされたか否かを判定する第2判定手段と、第1判定手段及び第2判定手段の判定結果が共に肯定判定である場合に、盗撮が行なわれるとみなして、予め設定した盗撮対策を実行する盗撮対策実行手段とを備える。
(もっと読む)
撮像装置
【課題】撮影した画像データに方位情報を対応付けて管理することを可能にする撮像装置を提供すること。
【解決手段】表示部13の表示画面上に設けられ、外部からの物体の接触位置に応じた信号の入力を受け付けるタッチパネル14と、表示部13が表示している画像に対し、タッチパネル14における外部からの物体が接触した軌跡に応じて画像内で基準となる基準方位を設定する方位設定部19hと、方位設定部19hが設定した基準方位を画像データのヘッダ情報に方位情報としてメモリカード15aに記憶させる制御を行うシステムコントローラ19と、を備える。
(もっと読む)
天体自動追尾撮影方法及び天体自動追尾撮影装置
【課題】赤道儀を使用せずに、既知の星図データを用いることで、カメラ(撮影装置)を任意の天体に向けて地上に対して固定状態で撮影するだけで各天体を見かけ上静止した状態で撮影できる天体自動追尾撮影方法及び天体自動追尾撮影装置を得る。
【解決手段】撮影装置を所定の天体に向けて予備撮影する段階と、予備撮影時の撮影装置の緯度情報、撮影方位角情報及び撮影仰角情報を入力する段階と、入力した緯度情報、撮影方位角情報及び撮影仰角情報に対応する範囲の星図データを入力する段階と、予備撮影によって得られた画像中の天体の位置に対する、入力した星図データによる天体の位置のずれ量を算出する段階と、算出したずれ量によって、入力される撮影方位角情報及び撮影仰角情報の少なくとも一方を補正する段階と、補正した前記撮影方位角情報及び撮影仰角情報の少なくとも一方に基づいて、天体自動追尾撮影を実行する段階と、を有する天体自動追尾撮影方法。
(もっと読む)
天体自動追尾撮影方法及び天体自動追尾撮影装置
【課題】赤道儀を使用せずに、カメラ(撮影装置)を任意の天体に向けて固定状態で撮影するだけで各天体を静止状態で撮影する。
【解決手段】本発明の天体自動追尾撮影方法は、所定の天体に向けた撮影装置の撮影方位角情報及び撮影仰角情報を入力する段階と、入力した前記撮影方位角情報及び撮影仰角情報に基づき、予備追尾を実行するための予備追尾用駆動制御データを算出する段階と、算出した前記予備追尾用駆動制御データによる予備追尾の始点位置に対応する第1の予備撮影画像と終点位置に対応する第2の予備撮影画像を取得する段階と、前記第1、第2の予備撮影画像中において対応する天体像のずれ量を算出する段階と、算出した前記ずれ量から、前記ずれ量を打ち消して本追尾を実行するための本追尾用駆動制御データを算出する段階と、算出した前記本追尾用駆動制御データにより前記天体自動追尾撮影を実行する段階とを有する。
(もっと読む)
風景画像合成装置、風景画像合成方法及び風景画像合成プログラム
【課題】走行途上の視覚的な有益情報を運転手に提供すること。
【解決手段】第1の車10の車載カメラ11aで撮影された第1の風景画像を入力し、第2の車20の車載カメラ21aで撮影された第2の風景画像を無線通信ネットワーク700を介して受信して、第1の風景画像の一領域と第2の風景画像の一領域とを比較して類似度が最も高い領域を特定し、その特定領域でそれら2枚の風景画像を重ね合わせて、重ね合わされた合成風景画像を表示する。
(もっと読む)
画像処理装置
【課題】位置情報を示す画像とユーザの撮影画像を1つの動画像として記録・再生する撮影システムを提供する。
【解決手段】ビデオカメラに、通常の撮影画像を入力する手段のほかに、別の映像入力源から画像を入力する手段を設け、これら2つの入力手段からの映像データを取り込み、メモリに格納する画像入力調停部を設ける。これにより、上記別の映像入力源を、カーナビゲーションの映像出力端子とすることで、カーナビゲーションの画面と、ユーザが撮影した画像を合わせてメモリ内に取り込める。また、監視用途ビデオカメラなどにおいては、地図画像データをあらかじめ保存している媒体から地図画像データを読み出す読み出し手段を別の映像入力源とすることで、同様にメモリ内に取り込める。このメモリ内のデータを動画像として圧縮・符号化処理することで、地図情報とユーザの撮影画像を1つの動画像として処理できる。
(もっと読む)
撮像装置、情報配信装置、送信方法、及び情報配信方法、並びにプログラム
【課題】画像ファイルを他の機器に配信する際、他のユーザが画像ファイルの撮影情報によって撮影者の現在位置を知るのを防ぐことを目的とする。
【解決手段】デジタルカメラ100は撮影した画像を処理して画像ファイルを生成して、この画像ファイルをWEBサーバ装置200に送信する。デジタルカメラは画像の撮影場所からデジタルカメラの現在位置までの移動距離を算出し、移動距離と所定の下限値とを比較する。デジタルカメラは、比較結果に応じて、画像ファイルをWEBサーバ装置に送信するか否かを制御する。
(もっと読む)
カメラ
【課題】 自然状況を含む画像の所望の構図での撮影の失敗を防ぐための事前の準備を行うことができるカメラを提供する。
【解決手段】 被写体を撮影する撮影部32と、前記撮影部からの撮影信号に基づいてスルー画を表示する表示部22と、自己位置を測定する自己位置測定部12と、前記撮影部による撮影方位を測定する方位測定部14と、天体の位置及び軌跡を算出するための情報を格納する記憶部46と、前記自己位置、前記撮影方位及び前記情報を用いて前記天体の位置及び軌跡の演算を行う天体位置演算部8と、前記天体位置演算部により算出された前記天体の位置及び軌跡を前記スルー画に重畳表示する表示制御部24と、前記表示部における所定の場所を指定する操作部26と、前記操作部により指定された前記天体の位置に基づいて撮影定数を設定する設定部8とを備える。
(もっと読む)
撮影装置、撮影方法およびプログラム
【課題】必要なハードウェア/ソフトウェアリソースを増大させることなく、撮影画像に付加される測位計算のためのデータ量を低減させることができる撮影装置を提供する。
【解決手段】撮影装置20は、被写体を撮像する撮像部23と、ユーザによる撮影操作を受け付ける操作部24と、操作部24が受け付けた撮影操作に応じて、撮像部23による撮像を制御するCPU27と、複数のGPS衛星から発信される信号を受信するGPSアンテナ部1と、撮像部23による撮像タイミングと同時のタイミングで、GPSアンテナ部1で受信した信号からレンジデータを取得する復調部3と、撮像部23により撮像された画像のデータに、復調部3により取得されたレンジデータを付加してRAM29に記憶させるCPU12,27とを備える。
(もっと読む)
動画再生装置、動画記録再生システム、動画制御方法、及びプログラム
【課題】フレームデータが連続して配置されたファイル形式において、センサ情報を動画に合わせて再生する。
【解決手段】動画ファイルは、フレームデータの系列上のキーフレームデータの前にセンサ情報が挿入されたデータ系列と、当該データ系列におけるキーフレームデータの位置、及びキーフレームデータと当該キーフレームデータに続くフレームデータとのデータ長を示すフレーム情報とを含む。フレームデータ抽出部145は、動画ファイルのフレーム情報をもとに、動画ファイルのデータ系列に含まれるフレームデータを順番に抽出する。センサ情報抽出部146は、フレーム情報をもとに、キーフレームデータの始点の位置と当該キーフレームデータの前のフレームデータの終点の位置との差分を算出し、差分がある場合、キーフレームデータの前に挿入されたセンサ情報を抽出する。
(もっと読む)
撮像装置、イベント推測方法及びプログラム
【課題】ユーザを煩わせることなく、撮影に関するイベントをより正確に推測することが可能な撮像装置、イベント推測方法及びプログラムを提供する。
【解決手段】ユーザに関するイベント情報が登録された標準イベントデータと、所定の場所に関するイベント情報が登録されたマップイベントデータと、所定の言語に関するカレンダーイベント情報が登録された言語カレンダーイベントデータを記憶する記憶部130と、画像データの撮影日付情報と、画像データの撮影位置情報と、画像データ撮影時に設定されている設定言語情報の少なくともいずれかに基づいて、標準イベントデータと、マップイベントデータと、言語カレンダーイベントデータのうちいずれか一つを使用して、画像データに関する撮影時イベントを推測するイベント情報処理部124とを備える。
(もっと読む)
通信端末
【課題】 特定のサービスを受けるための情報をスルー画上に重畳表示することができる通信端末を提供する。
【解決手段】 被写体を撮影する撮影部23と、前記撮影部からの撮影信号に基づいてスルー画を表示する表示部24と、自己位置を測定する自己位置測定部10と、サービスの提供を受けるための検索条件を設定する検索条件設定部と、前記自己位置に基づいて検索範囲を定める検索範囲設定部と、前記検索条件及び前記検索範囲を外部装置に対して送信する送信部48と、前記検索条件及び前記検索範囲に基づく検索結果を受信する受信部48と、前記検索結果に基づいて前記スルー画上の前記サービスの提供場所に対して前記サービスを示す画像を重畳表示する表示制御部22とを備える。
(もっと読む)
映像記録再生装置
【課題】被写体の位置情報と撮影日時に基づいて、指定した地図上の領域の映像シーンを抽出して、再生・編集を行うことのできる映像記録再生装置を提供することを目的とする。
【解決手段】範囲指定部8で表示装置10上の地図から地点A(Xa、Ya)、地点B(Xb、Yb)の2点を指定して、2点を対角線とする矩形領域Cを指定する。この矩形領域Cは、シーン抽出部9に送られ、シーン抽出部9は、位置データベース7から、矩形領域C内のシーンを、矩形領域Cに入ってから出るまでを1シーンとして時系列で並べ、表示装置10の地図情報の下に各シーンの先頭をサムネイル101で表示する。
(もっと読む)
物体認識方法および関連する認識装置
【課題】認識装置によって使用するための物体認識方法を提供する。
【解決手段】複数の物体の各物体は、対応する物体を特徴付けるメタ情報を供給するように構成される。認識装置は、物体認識装置のパースペクティブを変えることによって、選択に複数の物体の少なくとも1つの物体を含める。認識装置は、選択に含まれた複数の物体のこの少なくとも1つの物体を認識し、スナップショット内に選択に含まれる少なくとも1つの物体の表示を取り込む。認識装置は、選択内の少なくとも1つの物体に対応するメタ情報、および追加的に、選択に含まれていない複数の物体のうちのいくつかの物体に対応するメタ情報をさらに認識する。次いで、認識装置は、スナップショットに、選択に含まれている少なくとも1つの物体の表示に追加して、選択内の少なくとも1つの物体に対応するメタ情報、および選択に含まれていない物体に対応するメタ情報を取り込む。
(もっと読む)
撮像装置、撮影方法、及びプログラム
【課題】位置測位を行う撮像装置での消費電力をより抑えることを目的とする。
【解決手段】初期化情報を利用して位置測位を行う位置測位センサを有し、待機状態と撮影状態とをとり得る撮像装置が、前記待機状態において継続的に初期化情報を得て記録する初期化情報手段と、前記撮影状態において継続的に前記位置測位の結果の位置情報を得て記録する位置情報手段と、を有することによって課題を解決する。
(もっと読む)
221 - 240 / 886
[ Back to top ]