
Fターム[5F031GA47]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 移送装置、手段 (13,292) | アーム部 (5,670) | 動作 (3,504) | アームが回転 (1,258)
Fターム[5F031GA47]に分類される特許
1,241 - 1,258 / 1,258
基板搬送装置および露光装置
【課題】 本発明は、露光装置においてレチクル,ウエハ,マスク等の基板を搬送する基板搬送装置に関し、基板をステージ装置に吊り下げて保持する場合において、基板をチャックに確実にロードまたはアンロードすることを目的とする。
【解決手段】 ステージに配置され基板を吸着する吸着面を下向きに有するチャックと、前記チャックの下側から前記基板の搬入または搬出を行う搬送アームと、前記搬送アーム側に配置され前記基板の前記チャックへの吸着または離脱時に前記基板を前記吸着面に弾性的に押圧する付勢手段とを有することを特徴とする。また、前記チャックに配置され前記基板の前記チャックからの離脱時に前記基板を前記搬送アーム側に押し出す押出機構を有することを特徴とする。
(もっと読む)
基板搬送装置、基板搬送方法および露光装置

【課題】基板をステージ装置に吊り下げ保持する場合において、静電チャックから確実に基板を搬出できる基板搬送装置を提供する。
【解決手段】基板搬送装置は、ステージ12に配置され基板5を保持する吸着面を下向きに有するチャック2と、前記チャック2の下側で前記基板5の搬入または搬出を行う搬送アーム1と、前記基板5を支持する支持片14Cを前記吸着面の下側に備える基板支持部3と、前記基板支持部3を昇降させる駆動機構4と、を有し、前記基板支持部3は、前記搬入時において前記搬送アーム1から前記基板5を前記支持片14Cですくい上げて前記吸着面に当接させ、前記搬出時において前記チャック2から離脱した前記基板5を前記支持片14Cで支持して前記搬送アーム1に受け渡す。
(もっと読む)
基板搬送装置
【課題】 本発明は搬送構造を改善した基板搬送装置を提供する。
【解決手段】 本発明による基板搬送装置は、ベース部20と;ベース部20上に直線運動ができるように設置されて、回転体32が備わっている運動部30と;運動部30の両側に並立設置されて、高さ調節が可能な一対のフレーム部40a、40bと;一対のフレーム部40a、40bの間に連結されて、フレーム部40の高さ調節動作に連動して、上下直線運動する搬送部50と;を含んで構成される。これにより、構造的な安全性を確保した状態で、簡便で精密に基板、特に大型基板を搬送させることが可能になる。
(もっと読む)
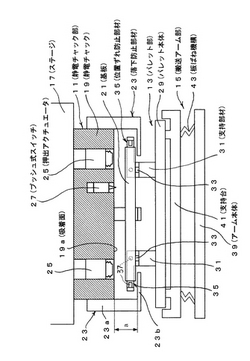
基板搬送装置および露光装置
【課題】基板をステージ装置に吊り下げ保持する場合において、静電チャックから確実に基板を搬出できる基板搬送装置を提供する。
【解決手段】基板搬送装置は、ステージ11に配置され基板5を保持する吸着面を下向きに有するチャック4と、前記基板5を上側に載置する基板載置部2を備え、前記チャック4の下側で前記基板5の搬入または搬出を行う搬送アーム1と、前記基板載置部2を隔てて配置された複数の引掛爪3と、を有し、前記引掛爪3は、前記基板載置部2に形成され前記基板5よりも上側に突出する基部3aと前記基部3aから前記基板載置部2に向けて張り出した爪部3bとを備え、前記基板載置部2と前記チャック4とは前記搬出時において上下方向に離間して、前記吸着面に吸着された前記基板5を前記爪部3bに押圧させることを特徴とする。
(もっと読む)
二重スカラアーム
基板搬送装置は駆動セクションと該駆動セクションに作動自在に結合されたスカラアームとを有し、該駆動セクションは該スカラアームを作動する。該スカラアームは上方アームと少なくとも1つの前方アームとを有している。該前方アームは該上方アームに作動自在に搭載されてその上に基板を保持することが可能である。該上方アームは実質的に剛性であって該上方アームの所定の形態の変更を調整することが可能である。  (もっと読む)
(もっと読む)
重力補償装置
重力補償装置は、基本質量(10)によって回転軸線(13)から第1の距離を置いたところで平衡装置(12)に及ぼされた力を、回転軸線から第2の距離を置いたところで平衡装置に反力を及ぼす力発生装置、例えばばね(14)によって、部分的に又は全体的に補償する。第1の距離、第2の距離又はこれら両方は、所望の重力補償具合を提供するよう選択可能である。角度可変半径を有する1つ又は2つ以上の滑車を使用するのがよい。重力補償装置は、基本質量にそれほど質量を追加することはなく、設計が単純である。 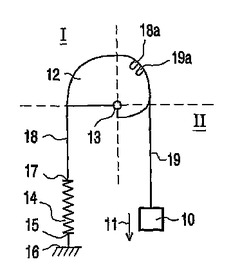 (もっと読む)
(もっと読む)
低圧環境で物品を処理するための装置及び方法
【解決手段】 物品を真空支援処理するための方法と装置が開示されており、ここでは、システムの効率と製品の品質を高めるために、段取り室(15)と処理室(11)を実質的に等しい低圧に維持しながら物品は両室間で移動させ、且つ、処理の前及び後に物品を移送するために磁気連結式駆動機構(43)が使用されている。 (もっと読む)
イオンビーム注入装置用のワークピース移送システム
【解決手段】ワークピース移送装置は、減圧状況下でワークピースを処理するためのイオン注入機に使用される。ワークピース移送装置は、注入チャンバの内部領域と流体連通する脱気可能なロードロック装置を含んでいる。ロードロック装置は、ワークピースと整合する開口を有するワークピースを支持するためのサポート表面を含んでいる。ワークピース移送装置はさらに、注入チャンバ内に、2つの自由度を有するリンケージによって支持された台を備えたワークピースサポートを含んでいる。リンケージは、処理に先だって、サポート表面の開口を横切って通過するよう台を移動させて、ワークピースをサポート表面から取り上げる。台は、ワークピースを注入チャンバ内で処理するための位置に保持する。その後、リンケージは、台をサポート表面の開口を横切るように通過させて、後の処理のためにワークピースをサポート表面上に配置する。 (もっと読む)
汚染物質削減基板移送およびサポートシステム
リフトアセンブリは基板を基板サポートから持ち上げ、かつ該基板を移送することができる。該リフトアセンブリは、該基板サポートの周辺に嵌合するようにサイズ設定されたフープと、該フープ上に搭載された1対のアーチ状フィンとを有しており、各アーチ状フィンは半径方向内側に延びる出っ張りを有する1対の対向端を備えており、各出っ張りは基板を持ち上げるための隆起した突起を有しており、該基板は実質的に該隆起した突起のみに接触して、該1対のフィンが該基板サポートから該基板を持ち上げるのに使用される場合に、該出っ張りとの接触を最小化することができる。該リフトアセンブリおよび他のプロセスチャンバコンポーネントは、(i)炭素および水素と(ii)シリコンおよび酸素の相互リンクネットワークを有するダイアモンド状コーティングを有することができる。該ダイアモンド状コーティングは、約0.3未満の摩擦係数と、少なくとも約8GPaの硬度と、約5×1012原子/cm2未満の金属の金属濃度レベルとを有する接触表面を有する。該接触表面は、直接的または間接的に基板に接触する場合に、基板の汚染を削減する。 (もっと読む)
薄膜形成装置
【課題】 ドラム型基板ホルダーの外周面に対して基板の取り付け、取り外しを、簡易な構成で容易に行うことができる薄膜形成装置を提供する。
【解決手段】 ドラム型基板ホルダー5を水平方向の回転軸を回転中心にして成膜室内に水平状態で回転自在に支持し、基板12を固定保持した基板固定治具13をアームでドラム型基板ホルダー5の外周面上に水平に搬送することで、ドラム型基板ホルダー5の外周面の角部5aに設けた固定装置14で基板固定治具13の端部13bを固定することができる。
(もっと読む)
基板処理装置及び基板の製造方法
本発明は、人の手を介することなく、自動的に正常状態にある基板を回収することができる基板処理装置を提供することを目的とする。基板12を多段に保持する基板保持具26と、この基板保持具26に基板12を移載する基板移載機34とからなり、基板保持具26の基板保持状態は検知部60により検知される。検知部60は、フォトセンサ64a,64bを有し、このフォトセンサ64a,64bから検知された検知波形が正常波形と比較され、少なくとも異常と判断された基板12以外の基板12を基板移載機34にて移載するよう制御する制御部66が設けられている。 (もっと読む)
半導体ウェーハを取り扱うエンドエフェクタ
半導体ウェーハを取り扱ういろいろなエンドエフェクタの設計が開示されている。例えば、比較的低温でウェーハを取り扱うエンドエフェクタが、比較的高温でウェーハを取り扱うエンドエフェクタとともに開示されている。いずれのエンドエフェクタも、ウェーハの縁部で該ウェーハに単に接触するように構成されている、独自に設計された支持部材を含んでいる。エンドエフェクタは、また、ウェーじゃ検出システムを含み得る。比較的低温でウェーハを取り扱うエンドエフェクタは、また、ウェーハを位置決めするばかりでなく、エンドエフェクタに取り付けられているロボット・アームにより引き起こされるエンドエフェクタの加速または減速中、エンドエフェクタ上のウェーハを保持するのに使用される押し装置を含み得る。設計されているように、エンドエフェクタは、非常に薄い外形を有し、簡単に操縦しやすいエンドエフェクタを作り得る。
 (もっと読む)
(もっと読む)
電子部品の製造におけるプレート形状のサブストレートを貯蔵し及び/又は輸送するための機器
本発明の目的は、いかなるウエハ(40)にもアクセスが簡単な状態で、実質的に水平な、密集したウエハ(40)の貯蔵を可能にすることである。この目的を達成するために、本発明では複数の積重ねた貯蔵要素(10)を備えてなる機器が設けられ、上記貯蔵要素(10)は、ウエハ(40)を置くことが可能である手段(16)を有する。貯蔵要素(10)は、特定の貯蔵要素(10a)と特定の貯蔵要素(10a)の上に配置された全ての貯蔵要素(10)を、所定の第一高さにだけ持ち上げることができる持上げ用突出部(14)を有し、その結果、接触間隔を作り出す。突出部(14)は、上記貯蔵要素(10a)の下に配置される貯蔵要素(10b)を、所定の第二高さにだけ持上げることに用いることもできる。 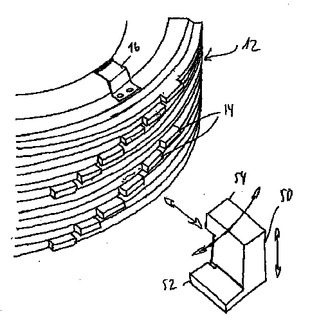 (もっと読む)
(もっと読む)
被処理体の処理システム及び処理方法
【課題】占有スペースやコストを大幅に削減することができ、しかもスループットを向上させることが可能な被処理体の処理システムを提供する。
【解決手段】第1の大気圧搬送室4と、第1の大気圧搬送室内に設けられた第1の搬送機構20と、第1の大気圧搬送室にロードロック室を介して直交するように設けた第1の真空搬送室6と、第1の真空搬送室内に設けた第2の搬送機構36と、第1の大気圧搬送室に接続した大気圧バッファ搬送室8と、大気圧バッファ搬送室内に設けたバッファ用搬送機構44と、大気圧バッファ搬室に直列に接続した第2の大気圧搬送室10と、第2の大気圧搬送室内に設けた第3の搬送機構54と、第1の真空搬送室に接続した真空処理室12A〜12Cと、第2の大気圧搬送室にロードロック室を介して接続した真空処理室12D、12Eとを備えて処理システムを形成する。
(もっと読む)
搬送システムと搬送方法
【課題】複数のクリーンルーム間で電子部品を遣り取りする場合の搬送効率アップによる生産性向上を図る。
【解決手段】 複数のクリーンルームの少なくとも1つに設けられるクレーン付のストッカー 21 と、該ストッカーの受渡領域に載置されるコンテナ 22 と、クリーンルーム内で移動する第一の搬送車 23 と、一般通路用のカバー付の第二の搬送車とを含んで構成し、ストッカー 21 と第一の搬送車 23 と第二の搬送車のそれぞれに、ストッカーと第一の搬送車間及び第一と第二の搬送車間で前記コンテナ 22 が自動的に受渡しできる移載手段 211,231 を設ける。
(もっと読む)
処理システム
【課題】 占有スペースをそれ程大きくすることなく、簡単なプロセスを含めた多種多様な処理を行う。
【解決手段】 被処理体Wに対して所定の処理を行う複数の処理装置32A〜32Fと、前記複数の処理装置に共通に接続された共通搬送室34と、前記共通搬送室内に設けられて前記処理装置との間で前記被処理体を搬送するための第1及び第2の2つの搬送手段40、42と、前記共通搬送室内であって前記2つの搬送手段のそれぞれの搬送範囲が重なる範囲内に設置されて、両側がゲートバルブ58A、58Bによって開閉されて密閉空間となるバッファ部50、52と、前記共通搬送室に接続されて真空引き可能になされたロードロック室36A、36Bと、前記ロードロック室に接続された導入側搬送室38と、前記導入側搬送室内に設けられて、前記被処理体を複数収容するカセットと前記ロードロック室との間で前記被処理体を搬送する導入側搬送手段124とを備えた。
(もっと読む)
ワーク搬送用ロボット
【課題】アームの熱膨脹収縮により生じるハンド部材の偏位量を許容範囲内に収めることができるアーム回動形のワーク搬送用ロボットを提供する。
【解決手段】固定プーリ8,27と、一端が固定プーリ8,27に対して回動自在に支持されたアーム13,26と、アーム13,26の他端に回転自在に支持された回転プーリ15,29と、固定プーリと回転プーリとの間に張設されたベルト17,30とを備えたアーム機構を多段に設けて、最終段のアーム機構の回転プーリ29にハンド部材40を取り付けたワーク搬送用ロボットにおいて、アーム13,26の熱膨脹収縮によりハンド部材40に生じる偏位を許容範囲に収めるように、テンションローラ22,35からベルト17,30に与える張力を調整するようにした。
(もっと読む)
搬送システムの搬送位置合わせ方法
【課題】 ティーチング基準位置における位置合わせを、精度良く且つ効率的に行なうことができる搬送システムの搬送位置合わせ方法を提供する。
【解決手段】 被搬送体Wを保持するフォーク48を有する搬送アーム部20と、この搬送アーム部を移動させる移動機構30と、搬送アーム部の移動エリア内に配置された少なくとも1つ以上の容器載置台24と、被搬送体の偏心量と偏心方向と切り欠き目印64の回転位置を光学的センサ62により検出する方向位置決め装置36と、全体の動作を制御する制御部72とを備えて位置合わせを行なう搬送システムの搬送位置合わせ方法において、マニュアルにより被搬送体を正確に位置合わせして載置したり、被搬送体を受け取りに行き、これを方向位置決め装置に搬送してその偏心量或いは切り欠き目印の回転誤差を求めることにより真に正しい適正位置座標を得ることができる。
(もっと読む)
1,241 - 1,258 / 1,258
[ Back to top ]