
Fターム[5F031MA13]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 処理装置 (13,378) | 装置へのウエハ等のローディング部 (643) | ローディング部の搬送系 (401)
Fターム[5F031MA13]に分類される特許
121 - 140 / 401
基板処理装置
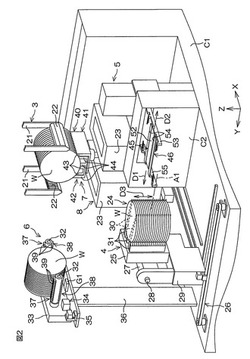
【課題】複数枚の基板の一括搬送および1枚の基板の枚葉搬送の切り換えに要する時間を短縮することができる基板処理装置を提供すること。
【解決手段】基板処理装置は、バッチハンド24によりフープ保持部に保持されたフープに対して複数枚の基板Wを一括して搬入および搬出するバッチ式の第1搬出入機構4と、第1および第2枚葉ハンド45,46によりそれぞれバッチハンド24およびフープに対して1枚の基板Wを搬入および搬出する枚葉式の第2搬出入機構5とを含む。
(もっと読む)
ウェーハの偏心補正方法及びウェーハ搬送装置

【課題】、簡易型アライメント装置の設置位置の自在化を高め、設置面積を縮小することができるウェーハの偏心補正方法及びウェーハ搬送装置を提供する。
【解決手段】ウェーハの移動機構として回転機構のみ有する簡易型アライメント装置でウェーハの偏心量を検出し、一方向に往復走行可能な基台と、その基台上で旋回自在に設けられる旋回軸と、その旋回軸に設けられ伸縮自在なアーム部と、そのアームの先端に設けられウェーハを把持するハンドとを有するウェーハ搬送ロボットを用いて、ウェーハの偏心を補正するウェーハの偏心補正方法において、ウェーハの偏心量を、基台の移動量、旋回軸の回転角及びアーム部の伸縮量のうち2つを用いた補正量に換算し、補正量に基づいて、基台の移動、旋回軸の回転及びアーム部の伸縮のうちいずれか2つを行うことによりウェーハの偏心を補正する。
(もっと読む)
プリアライナ装置を備えたウェハ搬送システム
【課題】組立調整に時間がかからない構成とし、ウェハ搬送装置とのウェハ受け渡し時間も大幅に短縮したプリアライナ装置によるウェハ搬送システムを提供すること。
【解決手段】ウェハを保持して回転させ、センサによって前記ウェハの外周を検出し、前記センサの検出情報を用いて少なくとも前記ウェハを所望の方向へと回転させるプリアライナ装置において、前記ウェハを保持する把持部材1に、前記ウェハの裏面と接触してこれを吸着保持する吸着面12が形成され、かつ前記ウェハを前記吸着面12へ搬送するウェハ搬送装置のエンドエフェクタ13が進入可能な凹部14が形成されたプリアライナ装置とした。
(もっと読む)
真空処理装置
【課題】入出力基板の構成や位置を変えずに制御機器の追加や変更に対応できるようにした真空処理装置を提供すること。
【解決手段】モジュールコントローラ113と入出力基板201の間で制御信号を送受信して真空処理装置の処理室に配置されたウエハを処理する際、モジュールコントローラ113の通信プログラム506と入出力基板201の通信プログラム601による第1のインターフェースと、モジュールコントローラ113の問の信号の送受信を専有する第1のインターフェースと、入出力基板201の通信プログラム601により、処理室にある制御対象の機器と接続された第2のインターフェースとを設け、入出力基板201は、制御対象の機器の動作指令信号の受信は第1のインターフェースにより行ない、制御対象の機器に対する受信した動作指令信号の送信は前記第2のインターフェースを介して行なうようにしたもの。
(もっと読む)
真空処理装置
【課題】本発明は、大気開放時に要する時間を抑制しつつ、圧力勾配の発生に基づくパーティクルの巻上げ防止を可能とする真空処理装置の提供を目的とする。
【解決手段】上記目的を達成するために、給気管からのガス導入によるロードロック室の大気開放のときに、ロードロック室内の圧力が所定の第1の圧力まで上昇したときに、排気管を用いたロードロック室内の排気を開始し、第1の圧力より高い第2の圧力まで、ロードロック室内の圧力が上昇したときに、排気管を用いた排気を停止する真空処理装置を提案する。
(もっと読む)
吸着搬送部材およびこれを用いた基板搬送装置
【課題】 基板を吸着して搬送する際に基板にパーティクルが付着しにくい吸着搬送部材およびこれを用いた基板搬送装置ならびにこの基板搬送装置を用いた基板処理装置および基板検査装置を提供する。
【解決手段】 先端側が二股に分岐した、支持部側から先端側に向けて長い板状体7に、板状体7の先端部の各表面の少なくとも2カ所に設けられた、気体を吸引して基板を吸着するための吸着部3と、分岐部を通って先端部の吸着部3同士をつなぐ先端側吸引路4aと、支持部に設けられた、分岐部における先端側吸引路4aに支持部側吸引路4bを介してつながって気体を吸引するための吸引部5とを備え、先端側吸引路4aが、先端部側で直線状であり、分岐部側で湾曲している吸着搬送部材1において、先端側吸引路4aの板状体7の長手方向における長さは、湾曲している部分の方が直線状の部分よりも長い吸着搬送部材1である。
(もっと読む)
基板搬送処理装置及び方法
【課題】少ない設置面積で、ウェーハを含む基板の搬送及び処理を行う装置及び方法を提供する。
【解決手段】線形搬送チャンバ1232は、線形トラックと、線形トラックに乗っているロボットアーム1243等を含み、基板を線形的に、処理チャンバ1201等の側部に沿って搬送する。又ロードロック1235を介し、処理チャンバ1201等に到達させ、搬送チャンバ1232に沿って基板を制御された雰囲気の中に供給する。よって相応な経費で、且つ改良されたスループットで効率的に製造を行うことができる。
(もっと読む)
基板処理システム、基板処理方法、プログラム及びコンピュータ記憶媒体
【課題】基板の搬送を効率よく行い、基板処理のスループットを向上させる。
【解決手段】塗布現像処理ユニット1は、平面視において環状に形成された軌道42と、基板Wを保持し、軌道42上を移動する複数の基板保持部41と、軌道42に沿って配置され、基板Wに所定の処理を行う複数の処理装置と、基板保持部41と処理装置との間の基板Wの搬送を制御する制御装置14と、基板保持部41と処理装置との間で基板の受け渡しを行う基板搬送機構と、を有している。複数の基板保持部41は、複数の処理装置の数よりも多く配置されている。制御装置14は、基板Wの処理レシピを格納するレシピ格納部170と、処理レシピに基づき基板保持部41を所定の処理装置へ移動させる基板保持部制御部171と、基板保持部41と所定の処理装置との間で基板の搬送を行うように基板搬送機構を制御する基板搬送機構制御部172と、を有している。
(もっと読む)
基板搬送用ロボット及びそれを備えた基板搬送装置、半導体製造装置
【課題】基板搬送用ロボットにおいて、基板を目的位置へ搬送する場合の搬送経路の選択肢を増やし、これにより搬送時間の最短経路を選択することを可能にさせる。
【解決手段】基板搬送用ロボットのコントローラが、複数の教示位置が教示された際、教示位置の各々に対するアクセス待機位置11を生成し、アクセス待機位置11から基板搬送用ロボットの最小旋回姿勢12までの複数の経路を生成して記憶する。
(もっと読む)
位置合わせ機構、加工装置および位置合わせ方法
【課題】反りを含む半導体ウェーハを破損させることなく、チャックテーブルに精度よく位置合わせすることができる位置合わせ機構、加工装置および位置合わせ方法を提供すること。
【解決手段】半導体ウェーハの外径よりも大径に形成され、半導体ウェーハの少なくとも外周縁部を吸着する吸着面25を有する仮置きテーブル23と、吸着面25に吸着された半導体ウェーハの外周縁部を撮像する撮像機構24と、半導体ウェーハの外周縁部の画像データに基づいて、半導体ウェーハの中心の位置データを算出する制御部と、半導体ウェーハの中心の位置データに基づいて、半導体ウェーハが保持されるチャックテーブル52の保持面56の中心に対し半導体ウェーハの中心を位置合わせした状態で、半導体ウェーハを保持面56に載置するウェーハ供給部17とを備えた。
(もっと読む)
基板処理システム
【課題】基板の搬送を効率よく行い、基板処理のスループットを向上させる。
【解決手段】塗布現像処理システム1には、ウェハ搬送装置40の周囲に、第1〜第4のバッファ装置41〜44と第1〜第4の処理装置群G1〜G4が配置されている。第1〜第4のバッファ装置41〜44は、複数のウェハを鉛直方向に多段に保管するバッファ部を有している。第1〜第4のバッファ装置41〜44は、バッファ部搬送機構によってレール45上を第1〜第4の処理装置群G1〜G4に対向する位置に移動可能になっている。第1〜第4の処理装置群G1〜G4の各処理装置には、当該処理装置と第1〜第4のバッファ装置41〜44との間でウェハを搬送するウェハ搬送機構が設けられている。
(もっと読む)
基板処理システム
【課題】基板の搬送を効率よく行い、基板処理のスループットを向上させる。
【解決手段】塗布現像処理システム1には、第1のバッファ装置40と第2のバッファ装置41が設けられている。第1のバッファ装置40と第2のバッファ装置41は、複数のウェハを鉛直方向に多段に保持して一時的に保管するバッファ部と、バッファ部を鉛直方向に移動させ、かつ回転させるバッファ部移動機構とを有している。第1のバッファ装置40の周囲には、第1の処理装置群G1及び第3の処理装置群G3が配置され、第2のバッファ装置41の周囲には、第2の処理装置群G2、第4の処理装置群G4及び第5の処理装置群G5が配置されている。第1〜第5処理装置群G1〜G5の各処理装置には、当該処理装置と第1のバッファ装置40又は第2のバッファ装置41との間でウェハを搬送するウェハ搬送機構が設けられている。
(もっと読む)
研削装置
【課題】研削加工後の被加工物を吸引保持して洗浄手段に搬送した後に、被加工物を吸引保持パッドから剥離する際に吸引保持パッドに吸引されている研削水が周囲に飛散しないようにした搬出手段を備えた研削装置研削装置を提供する。
【解決手段】被加工物を吸引保持するチャックテーブルと、該チャックテーブル上に吸引保持された被加工物を研削する研削手段と、チャックテーブル上で研削された加工後の被加工物を洗浄する洗浄手段と、チャックテーブル上で研削された被加工物を洗浄手段に搬出する被加工物搬出手段とを具備する研削装置であって、被加工物搬出手段は下面に被加工物を吸引保持する吸着面を有する吸引保持パッドと、吸引保持パッドを一端部に支持する搬送アームと、搬送アームの一端部に吸引保持パッドを懸垂状態で弾性支持する支持手段と、搬送アームの一端部に装着され吸引保持パッドの外周を覆う遮蔽部材とを具備している。
(もっと読む)
基板の受け渡し装置
【課題】この発明は処理部で処理される基板の受け渡しに要するタクトタイムを短縮できるようにした受け渡し装置を提供することにある。
【解決手段】第1の可動体14に設けられ第1の高さ位置と第2の高さ位置との間で上下方向及び水平状態と倒伏状態との間で回動方向に駆動される第1のアーム体22と、第2の可動体15に第1の高さ位置と第2の高さ位置との間で第1のアーム体と干渉することなく上下方向及び水平状態と倒伏状態との間で回動方向に駆動される第2のアーム体23と、一方のアーム体が第1の高さ位置にあって、他方が第2の高さ位置にあるとき、第1の高さ位置で水平状態にある一方のアーム体に基板を供給する搬送ロボット3と、一方のアーム体に基板を供給している間に他方のアーム体を第1の高さ位置から第2の高さ位置に下降させ、このアーム体に保持された基板を受ける搬送装置35と、第1、第2の可動体の上下駆動及び第1、第2のアーム体の回動駆動を制御する制御装置20を具備する。
(もっと読む)
基板取出装置及び基板取出システム
【課題】箱から基板を取り出して他の箱や搬送装置に渡すのに、多機能、コンパクトで簡易な構造であって、高スループットの基板取出装置を提供する。
【解決手段】蓋付きの箱3内に垂直方向に立てて並べて収納される複数枚の基板5を1枚ずつ取り出して、他の装置に移載する基板取出装置1が、箱3を左右に挟んで設けられる平行な一対の走行レール2と、一対の走行レール2上をそれぞれ走行自在に設けられる走行体11と、両方の走行体に連結され、走行体の高さ方向に沿って昇降自在に設けられる昇降体20と、走行体の高さ方向に沿って昇降体を昇降駆動する昇降機構23と、昇降体に、箱の蓋4と対面して設けられる蓋把持手段40と、昇降体に設けられ、基板を垂直状態及び水平状態に回転自在に保持する基板把持手段60と、基板把持手段を回転駆動する回転機構63とを有している。
(もっと読む)
真空処理装置
【課題】真空搬送室内において基板搬送手段を冷却する冷却ブロックを設けることにより、基板搬送手段における蓄熱を防止することである。
【解決手段】予備真空室(ロードロック室22,23)と複数の真空処理室25A〜25Dとの間で基板を搬送するために真空搬送室(第2の搬送室24)に設けられた基板搬送手段(第2の搬送アーム3)を備え、前記第2の搬送室24内における加熱した状態で真空処理が行われる真空処理室25B,25Cの搬送口に臨む位置において、前記第2の搬送アーム3の保持アーム33が前記真空処理室25B,25Cに対して進退するときに、その表面が当該保持アーム33に接近して設けられると共に、その表面を冷却するための冷却手段を備えた冷却ブロック51を設けると共に、前記保持アーム33と前記冷却ブロック51の表面との間に熱伝導ガスを供給するための熱伝導ガス供給手段を設ける。
(もっと読む)
基板処理システム
【課題】1層に対する複数回パターニングを高効率で行うことが可能な基板処理システムを提供すること。
【解決手段】キャリアブロックS1と、そこから一枚ずつ搬入された基板に対し1回目の塗布処理を行う第1塗布処理部31、1回目の現像処理を行う第1現像処理部41、2回目の塗布処理を行う第2塗布処理部32、2回目の現像処理を行う第2現像処理部42を有する処理ブロックS2と、露光装置との間で基板を受け渡すインターフェイスブロックS3と、これらの間で基板を搬送する基板搬送機構とを具備し、一つの基板に対して少なくとも2回の露光を行う露光装置に対応可能であり、第2現像処理部42の上に第1塗布処理部31が積層されてなる第1積層体と、第1現像処理部41の上に第2塗布処理部32が積層されてなる第2積層体とが並置されている。
(もっと読む)
基板収納方法及び記憶媒体
【課題】既存の設備を利用してフープ内を清浄化し、ウエハの汚染を防止して歩留まり率を向上させることができる基板収納方法を提供する。
【解決手段】基板処理システム10は、ウエハWにRIE処理を施すプロセスシップ11と、ウエハWを収納するフープ14a〜14cと、プロセスシップ11とフープ14a〜14cとを連結するローダーモジュール13及びローダーモジュール13内に設けられた搬送アーム機構19と、ローダーモジュール13内にダウンフローを形成して異物を底部から排出するFFU34と、ローダーモジュール13とフープ14a〜14cとの連結部に設けられた開閉扉とを有する。基板処理システム10のフープ14bにウエハWを収納する際、搬送アーム機構19によってウエハWをフープ14b内に搬入し、その後、所定の遅延時間が経過するまで開閉扉を開放状態のまま保持する。
(もっと読む)
基板処理装置及び基板処理装置における表示方法
【課題】搬送中のキャリアやボートの位置、搬送元、搬送先の把握を容易とする。
【解決手段】基板を搬送する搬送系と、搬送系の動作状態を操作画面に表示する操作部と、搬送系の動作を制御する制御部と、を備え、操作部は、搬送系の搬送元に対応する操作画面内の所定位置に搬送対象である搬送系を示す搬送系アイコン及び搬出中アイコンを表示し、搬送系の搬送先に対応する操作画面内の所定位置に搬入中アイコンを表示する。
(もっと読む)
真空処理装置、真空処理システムおよび処理方法
【課題】 被処理体が大型化しても真空処理容器の大きさを極力抑制できる真空処理装置を提供すること、および大型の搬送アームを使用せずに真空処理装置への被処理体の搬送が可能な真空処理システムを提供すること。
【解決手段】 第1の真空搬送装置200a内からプラズマ処理装置100内へ向けて基板Sを浮上搬送するには、基板Sの裏面側に搬送ステージ203の浮上用ガス噴射孔207から浮上用ガスを噴射して浮上させた状態で基板Sを一対のガイド装置205の保持部材213によって保持し、可動支持体217をレール215上でプラズマ処理装置100へ向けて移動させる。次に、保持部材213による保持を解除し、載置台103のガス噴射孔103bからのガスにより基板Sを静止浮上させて、プラズマ処理装置100へ基板Sを受け渡す。
(もっと読む)
121 - 140 / 401
[ Back to top ]