
Fターム[5F031MA13]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 処理装置 (13,378) | 装置へのウエハ等のローディング部 (643) | ローディング部の搬送系 (401)
Fターム[5F031MA13]に分類される特許
141 - 160 / 401
気相成長装置

【課題】半導体ウェーハの金属汚染を防止し、かつ半導体ウェーハの内外において損傷を防止する。
【解決手段】気相成長装置100は、加熱した半導体ウェーハ1を金属製の円板状の冷却プレート11に近接して、半導体ウェーハ1を冷却する冷却チャンバ10を備える。冷却チャンバ10は、冷却プレート11に取り付けて、半導体ウェーハ1の周縁を周方向に間隔をあけて支持する複数の支持部材13を備える。支持部材13は、半導体ウェーハ1が載置される円弧状の頂部が冷却プレート11の中心に向かう支持面131と、支持面131から突出して半導体ウェーハ1の外周を部分的に囲う段差132を有する。円弧状の頂部は、半導体ウェーハ1が冷却プレート11に接触しない所定の高さを設けると共に、冷却プレート11の中心に向かって下り傾斜している。
(もっと読む)
荷電粒子ビーム描画装置

【課題】試料を載置するステージを内蔵する描画室と、ステージに載置した試料に荷電粒子ビームを照射するビーム照射手段と、描画室に隣接する位置に配置されたロボット室と、ロボット室に収納された搬送ロボットと、ロボット室の温度を所定温度に維持する恒温手段とを備える荷電粒子ビーム照射装置において、搬送ロボットのエンドエフェクタ44の温度を所定温度に維持し、エンドエフェクタ44からの伝熱による試料の温度上昇を防止できるようにする。
【解決手段】ロボット室3の室壁31に、搬送ロボットの駆動源からロボットアームを介してエンドエフェクタ44に伝わる熱を奪って、エンドエフェクタ44の温度を所定温度に維持するエンドエフェクタ専用の温度調節手段たる扁平のポケット部33を設け、このポケット部33にエンドエフェクタ44を挿入自在とする。
(もっと読む)
成膜システムおよび真空ポンプの制御システム
【課題】装置の製造コストの増大を抑制でき、真空ポンプを有効に活用することが可能な成膜システムおよび真空ポンプの制御システムを提供する。
【解決手段】一定の時間間隔で連続的に基板Wが投入されるローディング室11と、基板が取り出されるアンローディング室15と、を備えた成膜装置10A,10Bが並行して二組配置され、一方の成膜装置10Aのローディング室と他方の成膜装置10Bのローディング室とが対向配置されるとともに、一方の成膜装置のアンローディング室と他方の成膜装置のアンローディング室とが対向配置され、一方の成膜装置のローディング室と他方の成膜装置のローディング室との間に、ローディング室内を真空状態にすることができる真空ポンプ31が設けられ、真空ポンプと一方のローディング室とが接続されるとともに、真空ポンプと他方のローディング室とが接続され、真空ポンプで排気する系統を切替可能に構成されている。
(もっと読む)
真空処理装置
【課題】複数のウエハーを搬送し、真空処理するための手段を提供する。
【解決手段】本発明の真空処理装置によれば、複数の指156を有するハンド部155を搬入用真空槽112a内に設けておき、大気雰囲気中で各指156上に複数の基板31を両端をはみ出した状態で配置し、搬入用真空槽112a内を真空排気し、処理用真空槽113と接続してハンド部155を処理用真空槽内に移動させる。処理用真空槽113内には複数の横棒162を有する昇降機構161を設けておき、横棒162を上方に移動させ、一本の指上の基板の両端を二本の横棒に載せて降下させ、載置台165に載せて真空処理を行う。ピンやトレイを使用せずに搬出入できる。
(もっと読む)
基板処理装置
搬送装置の駆動システムは、搬送装置に接続されている複数の永久マグネット、複数の永久マグネットの少なくとも1つの磁界に曝されている複数の固定巻線、固定巻線に電圧を加えて搬送装置に磁力をもたらす制御システム、及び搬送装置の浮揚、ピッチ及びロールの受動的安定化を提供するための搬送装置の少なくとも一側部に近接している強磁性コンポーネントの配列を含んでいる。 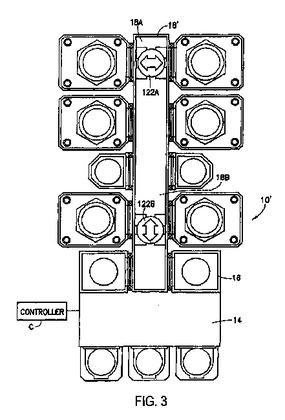 (もっと読む)
(もっと読む)
半導体ウエハの熱処理装置
【課題】 半導体ウエハの熱処理を一枚ずつ順次開始することができる提供する。
【解決手段】 半導体ウエハの熱処理装置は、管状の加熱炉と、その加熱炉内を伸びる複数の搬送シャフトと、複数の搬送シャフトをそれぞれ回転させるアクチュエータを備えている。管状の加熱炉は、半導体ウエハを搬入可能な搬入口から、半導体ウエハを搬出可能な搬出口まで伸びている。複数の搬送シャフトは、搬入口から加熱炉内を通って搬出口まで伸びているとともに、半導体ウエハの外周縁に当接可能な位置関係で配設されている。各々の搬送シャフトには、軸方向に沿って螺旋状に伸びるとともに、半導体ウエハの外周縁を受入可能な螺旋溝が形成されている。
(もっと読む)
基板処理装置
【課題】 基板の搬送効率を高め、基板処理工程の生産性を向上させる。
【解決手段】 複数枚の基板を保持するロードロック室と、ロードロック室内に連通可能な第1搬送室と、第1搬送室内に連通可能で基板を処理する第1処理室と、第1搬送室内に連通可能な中継室と、中継室内に連通可能な第2搬送室と、第2搬送室内に連通可能で基板を処理する第2処理室と、ロードロック室、第1処理室、中継室間での基板の搬送を行う第1搬送ロボットと、中継室、第2処理室間での基板の搬送を行う第2搬送ロボットと、第1搬送ロボットによる第1処理室内外への基板の搬送時間帯が、第2搬送ロボットによる第2処理室内外への基板の搬送時間帯と少しでも重なり合うように、第1搬送ロボット及び第2搬送ロボットを制御する制御部と、を備える。
(もっと読む)
試料搬送機構、及び試料搬送機構を備えた走査電子顕微鏡
【課題】
本発明は、試料搬送中に、試料に付着した異物の除去を行う試料搬送機構、及び試料搬送機構を備えた走査電子顕微鏡の提供を目的とする。
【解決手段】
上記目的を達成するための一態様として、試料を裏面から支持する試料搬送用ハンドを備えた試料搬送機構であって、前記試料を吸着して保持する吸着機構と、当該吸着された試料と、前記試料搬送ハンド間に形成される閉空間内で、試料に気体を吸着する吸着機構と、当該閉空間内の気体を吸引する吸引機構を備えた試料搬送機構を提案する。更に走査電子顕微鏡内で発生した異物を、試料カセット等に持ち込まないように、走査電子顕微鏡鏡体と試料カセットとの間に設けられた試料搬送用ハンドに設けられた異物除去機構によって、異物を回収する走査電子顕微鏡を提案する。
(もっと読む)
板状部材の搬送装置および板状部材の搬送方法
【課題】板状部材を厚み方向に沿った線を中心として回動させる場合にもタクトを短縮できる板状部材の搬送装置および板状部材の搬送方法を提供する。
【解決手段】搬送装置10は、上方に向かって複数の噴射口から気体を噴射することによりガラス基板11を浮上させる浮上部材21を有する浮上手段20と、浮上手段20によりガラス基板11が浮上部材21から浮上した状態でガラス基板11を保持するとともに搬送方向に沿って下流側に向かってガラス基板11を搬送する搬送手段30とを備える。搬送手段30は、搬送方向に沿って移動可能であるとともにガラス基板11の厚み方向に沿った線を中心として軸回転可能な吸着パッド34を有する。パッド34は、ガラス基板11の平面中央部に吸着する。
(もっと読む)
被処理体処理装置の圧力制御方法
【課題】複数の処理を効率良く実行可能な真空処理装置の圧力制御方法を提供する。
【解決手段】ロードロック室50、COR処理室10、熱処理室30及び大気搬送モジュール70を有する真空処理装置100において、熱処理室30の真空引き中にロードロック室50を大気状態にしてCOR処理前の被処理体を大気搬送モジュール70からロードロック室50に搬入し、熱処理室30の真空引きを終了してロードロック室50を設定圧力まで真空引きし、ロードロック室50が設定圧力に到達したら真空引きを終了し、“ロードロック室内圧力>熱処理室内圧力”となるように熱処理室30を真空引きし、圧力条件が満たされた後にロードロック室50と熱処理室30とを連通させる。
(もっと読む)
基板搬送装置、及び磁気記録媒体の製造方法
【課題】磁気ディスク等の基板を搬送し、基板処理を施して大量に生産する基板処理システムのスループット及び生産性の向上のため、各処理チャンバにおける処理時間(タクトタイム)を短縮する。
【解決手段】基板搬送装置は、ゲートバルブを介して連結されたチャンバと、前記ゲートバルブを開状態にして前記チャンバ間でキャリアを搬送路に沿って搬送する搬送機構と、前記キャリアが前記チャンバの停止位置に到達する前に前記キャリアを検知するセンサと、前記センサからの検知信号に基づき前記ゲートバルブの閉動作を開始するよう制御する制御器とを有する。
(もっと読む)
ロボット装置及びその制御方法
【課題】処理チャンバ内に収納されている基板の一部のみを搬出する場合に残りの基板が処理チャンバの内壁に干渉することを防止し、処理チャンバを十分に小型化できるようにする。
【解決手段】自由端122が基軸16を通過することなく基準線17に接近するようにアーム機構10の前段用モータ12A及び後段用モータ12Bを駆動しつつ、搬出される基板4Aを保持した保持端212Aが基準線17上を移動するようにハンド用モータ22Aを駆動する。これと同時に、搬出されない基板4Bを保持した保持端212Bが保持端212Aから離間するようにハンド用モータ22Bを駆動する。
(もっと読む)
基板搬送装置、基板検査装置、及び、基板搬送方法
【課題】基板搬送装置、基板検査装置及び基板搬送方法において、基板との不要な接触を防ぐ。
【解決手段】ウエハ搬送装置1は、ウエハWが載置されるウエハ載置面2a,3aを有し互いに平行に設置された2本のアーム部2,3と、ウエハ載置面2a,3a(アーム部2,3)をアーム部2,3の長手方向を回動軸A2,A3として水平面に対し傾斜させる傾斜手段としてのバランサ(錘)4,5と、アーム支持部6と、吸引用チューブとしてのアーム側吸引用チューブ7,8と、支持部側吸引用チューブ9と、傾き検出手段としての透過型センサ10,11と、を備える。
(もっと読む)
クリーンルームにおけるスパッタコーティングシステムへの基板ウエハ供給を反転する装置及び方法
【課題】クリーンルームにおいて光起電性モジュールをスパッタシステムへ輸送する際に、該モジュールの容易な回転、先のスパッタプロセスの検査、及び同じスパッタシステム又は生産システムの他の部位への該モジュールの新たな供給を可能にする。
【解決手段】本発明は、特に、クリーンルームにおいて光起電性モジュールをコーティングする際に、スパッタコーティングシステムへの基板ウエハ供給を反転する装置及び方法に関する。本装置及び方法は、a)光起電性モジュールの基板ウエハ(19)を保持する輸送フレーム(11)と、b)輸送フレーム(11)をマウントし、回転させ、輸送する手段を有する回転装置と、c)回転装置をスパッタコーティングシステムに対して正確に整列させる手段と、d)スパッタプロセスを検査する検知装置(18)と、上記ステップを遂行するためのプログラムコードを有するコンピュータプログラムと、を備える。
(もっと読む)
切断装置
【課題】
段取り替えに要する時間を短くして生産性を向上させた切断装置を提供する。
【解決手段】
本発明の切断装置は、ワーク10を切断する切断装置1であって、ワーク10を供給する供給部100と、切断刃71〜74によりワーク10を切断して、ワーク10を複数の個片化ワーク11に分割する加工部200と、複数の個片化ワーク11を収納する収納部300と、ワーク10を供給部100から加工部200へ搬送するローダ40と、複数の個片化ワーク11を加工部200から収納部300へ搬送するアンローダ41とを有し、供給部100、加工部200及び収納部300は着脱可能に直列に配置されており、ローダ40は第1接続部材によりワーク保持動作用の駆動源に接続されており、第1接続部材の長さを変えることによりローダ40の搬送範囲R1は可変である。
(もっと読む)
基板処理システムおよび基板処理方法
【課題】清浄な表面処理を実行可能な基板処理システムおよび基板処理方法を提供する。
【解決手段】搬送ロボット室11、第1ロードロック室21、予熱チャンバ31、処理チャンバ41、冷却チャンバ51および第2ロードロック室61のいずれにおいても、その内部圧力が大気圧以上に調整される。また、予熱チャンバ31内の圧力が搬送ロボット室11内の圧力よりも低くなるように圧力調整が実行される。したがって、プリベーク処理時に発生した酸素や水分などが予熱チャンバ31から搬送ロボット室11に流入するのを効果的に防止することができ、プリベーク処理後の基板Wに対する酸素や水分の再付着が抑制される。その結果、酸素や水分が処理チャンバ41に入り込むのを抑制することができ、各電子ビームキュアユニット4A、4Bにおいて清浄なキュア処理を行うことができる。
(もっと読む)
搬送装置、搬送方法、露光装置、及びデバイス製造方法
【課題】載置ずれや変形を生じさせることなく、基板保持部に基板を受け渡すこと。
【解決手段】基板Pを保持する基板保持部としてのプレートホルダ9に基板Pを搬送する搬送装置は、基板Pを支持する支持装置としての搬送ハンド12と、搬送ハンド12を駆動し、プレートホルダ9からの搬送ハンド12の一部の高さと他部の高さとを相対的に変化させ、かつその一部の高さ及び他部の高さを減少させて、搬送ハンド12が支持する基板Pをプレートホルダ9に受け渡す駆動装置13,14と、を備える。
(もっと読む)
基板搬送処理装置及び方法
【課題】今日使用されているシステムと比較して改善されたスループットを妥当なコストで効率的に実現する、ウェーハを含む基板搬送処理装置及び方法を提供する。
【解決手段】重要となる要素は、処理チャンバの各側に沿って配置された搬送チャンバの使用である。この搬送チャンバを使用することにより、基板がロードロックを介して制御された雰囲気中にフィードされ、次いで処理チャンバに到達する手段として、基板が搬送チャンバに沿ってフィードされ、次いで制御された雰囲気外にフィードされた後、処理チャンバ内での基板処理が行われる。
(もっと読む)
搬送装置および成膜基板の製造方法
【課題】CVD装置により薄膜を成膜する基板を、昇温してある成膜プレート上に載置した時の基板の反りを防止することにより、膜質や歩留りの低下を防ぐ。
【解決手段】連続式平行平板型CVD装置に用いる成膜プレートへの基板載置方法において、基板を前記成膜プレート上に載置する前および/または載置した後に、基板の略中央部に対し加熱を行う。
(もっと読む)
真空処理装置
【課題】生産性を向上させた真空処理装置を提供する。
【解決手段】減圧された内部のプラズマを用いて試料が処理される複数の真空処理容器と、真空処理容器がその周囲に連結されその内部が減圧されて前記試料が搬送される搬送室と、該搬送室と連通され真空側と大気側とで前記試料がやりとりされる複数のロック室と、前記搬送室内に配置され前記ロック室と前記複数の真空処理容器内の処理室との間で前記試料を搬送する真空搬送手段と、前記ロック室の大気側で内部に大気圧下で前記試料を搬送する空間を有した大気搬送容器と、該大気搬送容器内の空間に配置されカセットから前記試料を搬送する大気搬送手段と、複数の前記試料を定められた滞留時間を含み前記カセットから搬出し前記処理室で処理された後該カセットに戻すまでの複数の動作の予定情報に基づいて前記動作を調節する制御装置とを備えた真空処理装置。
(もっと読む)
141 - 160 / 401
[ Back to top ]