
Fターム[5F031NA05]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 雰囲気管理 (4,208) | 雰囲気 (2,327) | 真空 (1,240)
Fターム[5F031NA05]に分類される特許
1,221 - 1,240 / 1,240
ロードロック真空コンダクタンス制限アパチャー
イオン注入装置のロードロックと組み合わせる装置は、ロードロックの隔離弁スロットに隣接したカバーを含む。このカバーは、ロードロック内のロードすなわちウェーハのサイズ及び形状に概ね適合した開口部を画定し、この開口部は、ロボットアームがロードロック内部からウェーハを摘み、それを注入チャンバに移送するのに十分なクリアランスを備えている。カバーは、イオン注入装置のロードロックと注入チャンバとの間の開口を縮小するようにスロットの一部を遮蔽している。より小型の開口は、隔離弁及びスロットを開放する時に、ロードロックから注入チャンバへの圧力急上昇を減少する。圧力急上昇を減少することで、カバーは、注入チャンバが動作圧力に達する回復時間を短縮できる。  (もっと読む)
(もっと読む)
二重スカラアーム
基板搬送装置は駆動セクションと該駆動セクションに作動自在に結合されたスカラアームとを有し、該駆動セクションは該スカラアームを作動する。該スカラアームは上方アームと少なくとも1つの前方アームとを有している。該前方アームは該上方アームに作動自在に搭載されてその上に基板を保持することが可能である。該上方アームは実質的に剛性であって該上方アームの所定の形態の変更を調整することが可能である。  (もっと読む)
(もっと読む)
基材を処理するためのプロセス加工システムを動作させる方法
スループットを最適化するためにプロセス加工システムを動作させるための方法およびシステムを記載する。本プロセス加工システムは化学的酸化物除去のために構成され、本プロセス加工システムは、基材を化学処理するように構成された下部チャンバ部分、基材を熱処理するように構成された上部チャンバ部分、および下部チャンバ部分と上部チャンバ部分との間で基材を移動させるように構成された基材昇降アセンブリを有するプロセスチャンバを備える。  (もっと読む)
(もっと読む)
処理システムのオペレーションを制御する方法

【課題】処理システムのオペレーションを制御する方法、及び実行された時にその処理システムを制御するための操作を実行するプログラムを記録したコンピュータ読み取り可能な媒体を提供する。
【解決手段】処理システムのオペレーションを制御する方法において、ホストコンピュータ、処理ツール、及び排気システムの構成要素、例えば排除ツールは、システムバスに接続される。排除ツールは、ホストコンピュータと処理ツールの間のシステムバス上に送信された信号と、処理ツールから直接受信された信号とをモニタする。排除ツールは、モニタされた信号内に含まれた情報を使用して、排除ツールのオペレーション特性に関する処理ツールのための信号を発生させる。この信号は、直接か又はシステムバス上のいずれかで処理ツールに送信され、処理ツールは、発生した信号を使用して処理ツールのオペレーション状態を制御する。
(もっと読む)
低圧環境で物品を処理するための装置及び方法

【解決手段】 物品を真空支援処理するための方法と装置が開示されており、ここでは、システムの効率と製品の品質を高めるために、段取り室(15)と処理室(11)を実質的に等しい低圧に維持しながら物品は両室間で移動させ、且つ、処理の前及び後に物品を移送するために磁気連結式駆動機構(43)が使用されている。 (もっと読む)
温度制御方法及び温度制御装置
基材の温度を制御する装置が、基材テーブルと、基材テーブルに配置され、基材テーブルの熱表面と熱的に接続する熱組立体を有する。熱組立体は、熱輸送流体を輸送するチャネルを有する。装置は、熱輸送流体の温度を第1温度に制御するように構成される第1流体ユニットと、熱輸送流体の温度を第2温度に制御するように構成される第2流体ユニットと、熱組立体のチャネル、第1流体ユニットと第2流体ユニットと流路連通する出口流制御ユニットとを更に有する。出口流制御ユニットは、第1温度を有する熱輸送流体と第2温度を有する熱輸送流体の少なくとも1つまたはこれらの組み合わせを含む制御された熱輸送流体をチャネルに供給するように構成される。  (もっと読む)
(もっと読む)
粘着チャック装置
簡単な構造で基板を確実に着脱する。 保持板1の基板側に、基板Aの裏面A1と対向して粘着保持する粘着部材3と、該基板側面1aと交差する方向へ出没変形可能な変形膜4とを設け、この変形膜4の出没変形で粘着部材3の粘着表面3aと基板Aを当接させて粘着すると共に、これら両者を強制的に引き離すことにより、粘着部材3の粘着表面3aから基板Aが無理なく剥離される。 (もっと読む)
イオンビーム注入装置用のワークピース移送システム
【解決手段】ワークピース移送装置は、減圧状況下でワークピースを処理するためのイオン注入機に使用される。ワークピース移送装置は、注入チャンバの内部領域と流体連通する脱気可能なロードロック装置を含んでいる。ロードロック装置は、ワークピースと整合する開口を有するワークピースを支持するためのサポート表面を含んでいる。ワークピース移送装置はさらに、注入チャンバ内に、2つの自由度を有するリンケージによって支持された台を備えたワークピースサポートを含んでいる。リンケージは、処理に先だって、サポート表面の開口を横切って通過するよう台を移動させて、ワークピースをサポート表面から取り上げる。台は、ワークピースを注入チャンバ内で処理するための位置に保持する。その後、リンケージは、台をサポート表面の開口を横切るように通過させて、後の処理のためにワークピースをサポート表面上に配置する。 (もっと読む)
薄膜形成装置
【課題】 ドラム型基板ホルダーの外周面に対して基板の取り付け、取り外しを、簡易な構成で容易に行うことができる薄膜形成装置を提供する。
【解決手段】 ドラム型基板ホルダー5を水平方向の回転軸を回転中心にして成膜室内に水平状態で回転自在に支持し、基板12を固定保持した基板固定治具13をアームでドラム型基板ホルダー5の外周面上に水平に搬送することで、ドラム型基板ホルダー5の外周面の角部5aに設けた固定装置14で基板固定治具13の端部13bを固定することができる。
(もっと読む)
イオンビーム注入装置用のアンビリカルコード設備の連結装置
イオンビーム注入装置は、ビームラインに沿って移動するイオンビームを発生させるためのイオンビーム源と、イオンビームと交差するように加工物が配置されて、イオンビームによって加工物の表面にイオンを注入するための真空室、即ち、注入チャンバーとを含む。さらに、イオンビーム注入装置は、注入チャンバーに連結され、加工物24を支持する加工物支持構造体100を含む。加工物支持構造体は、加工物24を支持するための回転可能な受け台204を含む静電チャック202を有する。さらに、加工物支持構造体は、受け台に連結されて回転可能な第1リール262と、第1リールに連結された冷却ラインおよび電気導体等の設備を担持する屈曲性の中空コードとを含む。その結果、受け台が第1方向に回転すると、第1リールの回りに巻き取られる屈曲可能なコードの長さが増加し、また、受け台が第1方向と反対の方向に回転するとき、第1リールの巻き取られる屈曲可能なコードの長さが減少する。  (もっと読む)
(もっと読む)
真空下の半導体処理システムにおいて加工中の製品を処理する方法及びシステム
本発明は、真空下の半導体処理システムにおいて加工中の製品を処理する方法及びシステムに関し、線形処理システムを横断するためにアームからアームへと材料を処理するための方法及びシステムを含む。 (もっと読む)
基板を処理するためのシステムおよび方法
少なくとも1つの基板(5)を真空プロセスにて処理するための少なくとも1つの処理チャンバ(1)を備えた、基板を処理するためのシステムであって、前記処理チャンバ(1)は、閉鎖ボディ(15)にて閉鎖することができる基板アクセス(13)を備え、このシステムは、少なくとも前記閉鎖ボディ(15)を移動させるように構成された運搬デバイス(8)を備え、この運搬デバイス(8)は、前記基板(5)を前記真空プロセスの際に少なくとも部分的にカバーするためのマスク(4)を、少なくとも前記処理チャンバ(1)の外側のある位置と前記処理チャンバ(1)の内側のある位置との間で運搬するように構成される。少なくとも前記基板ホルダ(2)に、基板ホルダ(2)とマスク(4)とを互いに位置決めするための手段が提供された場合は、有利である。本発明は、更に、このようなシステムの使用に係る。 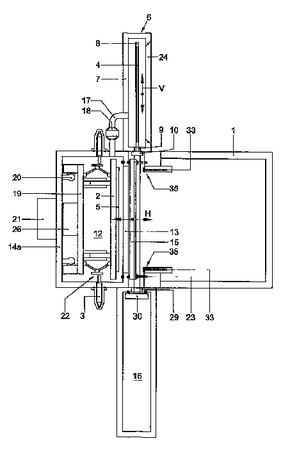 (もっと読む)
(もっと読む)
被処理体の処理システム及び処理方法
【課題】占有スペースやコストを大幅に削減することができ、しかもスループットを向上させることが可能な被処理体の処理システムを提供する。
【解決手段】第1の大気圧搬送室4と、第1の大気圧搬送室内に設けられた第1の搬送機構20と、第1の大気圧搬送室にロードロック室を介して直交するように設けた第1の真空搬送室6と、第1の真空搬送室内に設けた第2の搬送機構36と、第1の大気圧搬送室に接続した大気圧バッファ搬送室8と、大気圧バッファ搬送室内に設けたバッファ用搬送機構44と、大気圧バッファ搬室に直列に接続した第2の大気圧搬送室10と、第2の大気圧搬送室内に設けた第3の搬送機構54と、第1の真空搬送室に接続した真空処理室12A〜12Cと、第2の大気圧搬送室にロードロック室を介して接続した真空処理室12D、12Eとを備えて処理システムを形成する。
(もっと読む)
半導体製造システム
【課題】大気ロボットハンドリング装置を提供すること。
【解決手段】半導体製造ツール30は2つのロードロック36,40を有し、一方はツール30に入って処理される半導体ウェーハ用であり、他方は処理後にツール30から出るウェーハ用である。ツール30は3つの大気ウェーハハンドリングロボット44,46,48と関連して、ロードロック36,40により可能となる高スループットを得る。第1のロボット44は未処理のウェーハを供給源からウェーハ・プリアライナ50に搬送し、第2のロボット46は、ウェーハを、ウェーハ・プリアライナ50から、ウェーハがツール30に入るロードロック36に搬送し、第3のロボット48は、処理済のウェーハを、ウェーハがツール30から出るロードロック40から供給源42に搬送する。
(もっと読む)
処理システム
【課題】 占有スペースをそれ程大きくすることなく、簡単なプロセスを含めた多種多様な処理を行う。
【解決手段】 被処理体Wに対して所定の処理を行う複数の処理装置32A〜32Fと、前記複数の処理装置に共通に接続された共通搬送室34と、前記共通搬送室内に設けられて前記処理装置との間で前記被処理体を搬送するための第1及び第2の2つの搬送手段40、42と、前記共通搬送室内であって前記2つの搬送手段のそれぞれの搬送範囲が重なる範囲内に設置されて、両側がゲートバルブ58A、58Bによって開閉されて密閉空間となるバッファ部50、52と、前記共通搬送室に接続されて真空引き可能になされたロードロック室36A、36Bと、前記ロードロック室に接続された導入側搬送室38と、前記導入側搬送室内に設けられて、前記被処理体を複数収容するカセットと前記ロードロック室との間で前記被処理体を搬送する導入側搬送手段124とを備えた。
(もっと読む)
駆動装置
【課題】差動排気シールおよび静圧気体軸受を有する軸受部の軸部材30とのギャップ変動を抑えて組立調整を容易にする駆動装置を提供する。
【解決手段】差動排気シールおよび静圧気体軸受を有する軸受部の軸部材30とのギャップ変動を抑えて組立調整を容易にするために、筐体20の孔22に挿入された軸部材30をシールする差動排気シール50を、孔22に挿入された略円筒状のハウジング56内に設ける。このハウジング56内には、多孔質グラファイトからなる静圧軸受72、73を有する軸受部70が設けられている。
(もっと読む)
被処理体の搬送機構及び処理システム
【課題】 高速搬送ができ、しかも、被処理体の位置ずれも生ずることのない被処理体の搬送機構を提供する。
【解決手段】 薄い板状の被処理体Wを搬送するために比較的長い共通搬送エリア6内に設けられた搬送機構40において、前記共通搬送エリアの長手方向に沿って設けられる案内レール42と、前記案内レールに沿って移動可能になされた移動体44Aと、前記移動体に設けられて、前記被処理体の周縁部の下側角部に係合される断面L字状の係合段部82,84を有する複数の被処理体支持支柱80とを備える。これにより、被処理体を上記係合段部により保持することにより、高速搬送ができ、しかも、被処理体の位置ずれが生ずることも防止する。
(もっと読む)
半導体露光装置とデバイス製造方法
【課題】試料を試料室から露光装置に入れる動作と試料を露光装置から試料室に出す動作とを、同時に行なえるを提供する。
【解決手段】パターンの設けられている基板を保持する基板ステージ手段と、前記基板を一時格納する基板格納手段と、試料を移動可能に保持する試料ステージ手段と、前記試料を一時格納する試料格納手段と、前記試料を前記試料格納手段と前記試料ステージ手段との間で搬送する第1搬送手段と、前記第1搬送手段を格納する第1搬送空間と、前記第1搬送空間の気圧を制御する第1気圧制御手段とを有する第1ロードロック手段と、前記試料を前記試料格納手段と前記試料ステージ手段との間で搬送する第2搬送手段と、前記第2搬送手段を格納する第2搬送空間と、前記第2搬送空間の気圧を制御する第2気圧制御手段とを有する第2ロードロック手段と、を有することを特徴とする半導体露光装置。
(もっと読む)
エピタキシャル成長装置、及び基板移載方法
【課題】低水分分圧でエピタキシャル成長を行える技術を提供する。
【解決手段】このエピタキシャル成長装置1では、搬入室25と第1のロードロック室31との間に搬送室14が配置され、その搬送室14と、搬入室25と、第1のロードロック室31には、窒素ガス導入ポート20、21、28がそれぞれ設けられている。窒素ガス導入ポート20、21、28から窒素ガスを導入すると、窒素ガス雰囲気中で搬入室25から第1のロードロック室31内に基板17を搬送できる。第1のロードロック室31内に搬入された基板17は、ボートに搭載され、ボートローダ29によって熱処理室12内に搬入される。そのボートローダ29周囲には、加熱されたオイルが循環できる循環路4が配置されており、ベーキングの際に、ボートローダ29を加熱できるように構成されている。従って、従来では加熱できない部分までベーキングを行うことができる。
(もっと読む)
搬送システムの搬送位置合わせ方法
【課題】 ティーチング基準位置における位置合わせを、精度良く且つ効率的に行なうことができる搬送システムの搬送位置合わせ方法を提供する。
【解決手段】 被搬送体Wを保持するフォーク48を有する搬送アーム部20と、この搬送アーム部を移動させる移動機構30と、搬送アーム部の移動エリア内に配置された少なくとも1つ以上の容器載置台24と、被搬送体の偏心量と偏心方向と切り欠き目印64の回転位置を光学的センサ62により検出する方向位置決め装置36と、全体の動作を制御する制御部72とを備えて位置合わせを行なう搬送システムの搬送位置合わせ方法において、マニュアルにより被搬送体を正確に位置合わせして載置したり、被搬送体を受け取りに行き、これを方向位置決め装置に搬送してその偏心量或いは切り欠き目印の回転誤差を求めることにより真に正しい適正位置座標を得ることができる。
(もっと読む)
1,221 - 1,240 / 1,240
[ Back to top ]