
Fターム[5F047FA15]の内容
Fターム[5F047FA15]に分類される特許
1 - 20 / 36
保持具、搭載装置、基板装置の製造方法
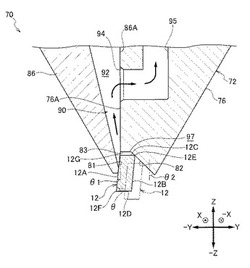
【課題】半導体素子を安定した姿勢で保持できるようにする。
【解決手段】半導体素子の側面に突き当たる第1面と、前記半導体素子の前記側面と対向する対向面の稜線に突き当たる第2面と、前記側面が前記第1面に突き当たり、且つ、前記稜線が前記第2面に突き当たった状態に前記半導体素子が保持されるように、当該半導体素子に対して吸引力を作用させる吸引部と、を備える。
(もっと読む)
ダイボンダ及びボンディング方法

【課題】既にボンディングしたダイに対してダイを180度回転させて積層しても、製品品質の高いダイボンダ又はボンディング方法を提供する。
【解決手段】ピックアップヘッド21でウェハからダイDをピックアップしアライメントステージ31に前記ダイDを載置し、ボンディングヘッド41で前記アライメントステージ31から前記ダイDをピックアップし基板又は既にボンディングされたダイD上にボンディングするダイボンダ又はボンディング方法において、前記ボンディングヘッド41が前記アライメントステージ31から前記ダイDをピックアップする前に前記ダイDの姿勢を前記ボンディングする面に平行な面で所定角度で回転させる。
(もっと読む)
半導体製造装置及び半導体製造方法
【課題】半導体製造の後工程における実装処理のウエハ交換にかかる時間が短く、稼動効率の高い半導体製造装置及び半導体製造方法を提供する。
【解決手段】前記半導体製造装置の装置本体に着脱自在なウエハカセットと、前記ウエハカセットに収納可能であり、前記ウエハが搭載され、かつ前記半導体チップの情報を保有するバーコードが貼付されたウエハキャリアと、前記ウエハキャリアを載置可能で回転可能なバッファテーブルとバーコードリーダとを備え、かつ前記バーコードリーダに前記ウエハキャリアのバーコードの読み取り動作後に、前記ウエハキャリアの向きを前記被実装部材への実装動作のための向きに合わせるアライメント動作を行うバッファ装置と、前記バッファ装置と半導体チップのピックアップ位置との間で前記ウエハキャリアを搬送するXYθテーブルと、前記被実装部材に半導体チップを実装する実装機構が備えられていることを特徴とする。
(もっと読む)
半導体チップのピックアップ装置、ピックアップ方法、ダイボンディング装置、ダイボンディング方法、半導体装置の製造方法
【課題】半導体チップのピックアップ処理の信頼性の向上を図る。
【解決手段】本発明に係るピックアップ方法は、保持冶具に保持されるウェハに所定の配列で形成され個片に分離された複数の半導体チップの配列データ及び個々の半導体チップの良否を示す良否データを含むマップデータを作成し、ウェハ上に設けられた2つ以上のターゲットダイ、及び、複数の半導体チップのうち、2つのターゲットダイ間に配置される少なくとも1つの参照チップ18を認識し、装置座標系における前記複数の半導体チップの位置座標を特定し、特定された半導体チップの位置座標を用いて、マップデータに基づき、参照チップ18以外の半導体チップのピックアップ処理を行い、参照チップ18以外の半導体チップのピックアップ処理が完了した後に、参照チップのピックアップ処理を実行する。
(もっと読む)
ダイボンダ及びボンディング方法
【課題】
本本発明は、短時間で確実にダイをプリスアライメントテージからピックアップできるダイボンダ及びボンディング方法を提供することである。
【解決手段】
本発明は、ウェハからダイをピックアップし、プリアライメントステージに前記ダイを載置し、ボンディングヘッドに設けられた吸着ノズルが前記プリアライメントステージから前記ダイをピックアップし、前記ダイの前記プリアライメントステージでの載置状態を撮像し、前記撮像結果に基づいて、前記プリアライメントステージに載置された前記2個以上の前記ダイのうち複数の前記ダイを一括して吸着できるかの一括吸着可否を判断し、前記一括吸着可否の判断に基づいて前記ダイを吸着してピックアップして基板にボンディングすることを特徴とする。
(もっと読む)
ダイボンダ及びボンディング方法
【課題】本発明は、ボンディングヘッドに設けた基準ピンが基板へのボンディング時に、基板や周囲の部品に接触する等の干渉をせず、フライ認識時には、基準ピン及びダイのどちらも結像する点がずれず、画像がぼけないダイボンダ及びダイボンディング方法を提供することにある。
【解決手段】本発明ダイボンダ及びダイボンディング方法において、ボンディングヘッドは、ダイを吸着して保持する吸着ノズルと、基準ピンと、吸着ノズル及び基準ピンを取り付けた実装ヘッドとを具備し、部品認識カメラは、ボンディングヘッドの吸着ノズルに保持されたダイから出射される反射光を透過し基準ピンとダイの焦点距離をほぼ等しくする光学ガラスを具備し、基準ピンとダイを撮像するものである。
(もっと読む)
電子部品実装装置及び電子部品実装方法
【課題】ウエハから良品のダイを取り出して基板に実装する際の実装時間を短縮することができる電子部品実装装置及び電子部品実装方法を提供する。
【解決手段】電子部品実装装置は、ウエハ全体の画像から、それぞれのダイの位置情報を取得する。また、それぞれのダイの良否情報を取得する。さらに、それぞれのダイの位置情報と良否情報から、良品のダイの位置情報を取得する。そして、取得した良品のダイの位置情報に基づいて、ウエハから良品のダイを取り出して基板に実装する。そのため、従来のように、それぞれのダイを撮像する必要がない。従って、ウエハから良品のダイを取り出して基板に実装する際の実装時間を短縮することができる。
(もっと読む)
部品供給装置
【課題】主として、駆動源及び装置全体の大型化を抑制し、部品を供給するときに不要な振動が発生することを防止できる部品供給装置を提供する。
【解決手段】駆動源として機能する第1サーボモータ32及び第2サーボモータ36が動作しない固定部材22に固定されているため、ピックアップノズル12及び回転支持部材20などの動作部材の重量を軽量化することができる。これにより、ピックアップノズル12及び回転支持部材20などの動作部材を移動させるときの動力が小さくてすみ、小型のサーボモータ32、36を採用できる。
(もっと読む)
半導体チップ搭載装置及び半導体チップ搭載方法
【課題】搭載対象のチップが良品であるか否かを判断しながら搭載処理が行えるようにする。
【解決手段】 複数のチップにダイシングされたウェハ5の周縁位置を複数撮影する撮影手段12,14と、撮影手段12,14により撮影されたウェハ5の周縁位置の画像データに基づき、ウェハ5の外縁をなすウェハ5円の中心位置及び直径を含むウェハ情報を算出するウェハ情報算出手段15と、予め設定されたチップサイズ及びウェハ情報に基づき、搭載するチップの中心位置及び当該チップにおける所定箇所のコーナ位置を含むチップ情報を算出するチップ情報算出手段15と、チップ情報に基づき、チップのコーナ位置がウェハ5円の内側に位置するか否かを判断し、ウェハ5円の内側に位置する場合には、当該チップは搭載可能な良品であると判断する良品判断手段15と、チップが良品と判断された場合に、当該チップの搭載を行う搭載実行手段と、を備える。
(もっと読む)
ダイボンダ及び半導体製造方法
【課題】
本発明は、ダイを正確にボンディングできる信頼性の高いダイボンダ及び半導体製造方法を提供することである。
【解決手段】
本発明は、ダイをウェハから吸着して基板にボンディングするボンディングヘッドと、前記ダイの位置を所定精度で前記位置決めする第1の調整機構を有し、前記ボンディングヘッドを位置決めする位置決めを機構と、前記位置決め機構を制御する位置決め制御部と、前記ボンディングヘッドに設け、前記第1の調整機構よりも高い精度で前記ダイの位置を調整する第2の調整機構とを有する。
(もっと読む)
実装機
【課題】装置がX方向に大きくなってしまうことを抑制することが可能な実装機を提供する。
【解決手段】この実装機100は、基台1と、ベアチップを保持可能に構成されているとともに、基台1に対してY方向に移動可能なウエハ保持テーブル5と、ウエハ保持テーブル5に保持されたベアチップを下方から突き上げる機構を有し、基台1に対して少なくともX方向に移動可能な突上げ装置7と、突上げ装置7により突き上げられたベアチップを吸着する機構を有し、基台1に対して少なくともX方向に移動可能である取出装置6と、取出装置6からベアチップを受け取るとともに、ベアチップをプリント基板Pに実装するヘッドユニットとを備えている。
(もっと読む)
チップ搭載装置、傾き検出方法およびプログラム
【課題】チップ搭載装置が、ターゲットマークの付されてないウェハに対しても、より迅速に傾き補正を行えるようにする。
【解決手段】画像処理部610が、1行(横の並び)分の半導体チップの基準点の座標値を算出する。傾き検出部620は、座標値を算出された基準点の近似直線を求め、この近似直線の傾きを求める。駆動制御部630は、傾き検出部620が求めた傾きに基づいてチップ積載部50を回転させて傾き補正を行う。このように、基準点の座標値を求めて傾き補正を行うので、ターゲットマークの付されていないウェハに対しても傾き補正を行える。また、1行分の半導体チップの基準点に対して傾き補正を1回行えばよいので、より迅速に傾き補正を行える。
(もっと読む)
電子部品の実装装置及び実装方法
【課題】半導体チップを基板に対して要求される条件に応じて実装することができる実装装置を提供することにある。
【解決手段】搬送レール1によって搬送されて実装位置に位置決めされる基板の搬送方向と交差する方向に対向して配置された半導体チップの供給部4と、供給部と搬送レールの間に配置された中間ステージ14と、基板の搬送方向と交差する方向に駆動可能に設けられた第1の実装ツール31e及び第2の実装ツール32eと、第1、第2の実装ツールの駆動を制御し、半導体チップを基板に精密実装するときには第1の実装ツールによって供給部から半導体チップを取り出させて中間ステージに載置させた後、第2の実装ツールによって中間ステージの半導体チップを取り出させて基板に実装させ、半導体チップを基板に高速実装するときには第1の実装ツールによって供給部から半導体チップを取り出させて基板に実装させる制御装置を具備する。
(もっと読む)
ダイボンド装置及びダインボンディング方法
【課題】 接着剤塗布作業工程のタクトタイムを抑制し、ダイボンド時間を短縮するダイボンド装置を得ることを目的とする。
【解決手段】 ディスペンス1により実装される半導体部品6の部品サイズや形状に合わせた塗布形状を接着剤供給ステージ3に形成し、部品トレイ5上の半導体部品を部品吸着ヘッドで吸着し、接着剤供給ステージ3上に塗布された接着剤2の位置まで移動後、下降して半導体部品6裏面に接着剤2を転写する。その後、基板7のダイアタッチ部に、半導体部品6をダイボンドして部品実装を行う。
(もっと読む)
ペレットの位置認識装置、ペレットのマウント装置及び半導体装置の製造方法
【課題】コレットにより保持されているペレットの位置認識の精度及び信頼性を向上させる。
【解決手段】位置認識装置1は、光を照射する光照射部2を有する。更に、ペレット3を保持する保持部4と、光照射部2から照射される光を保持部4により保持されているペレット3へ向けて反射させる反射面5と、を有するコレット6を有する。更に、反射面5からの反射光によるペレット3の投影画像を撮像する撮像部7と、投影画像に基づき、保持部4により保持されているペレット3の位置を認識する画像認識部と、を有する。光照射部2は、光源9と、光源9からの光を平行光又は集束光に変換する光変換部10とを有し、変換後の光を一方向から反射面5に向けて照射する。反射面5は平面である。
(もっと読む)
部品の搭載装置、部品の搭載方法
【課題】部品Aを、部品Bに精度良く搭載する部品の搭載装置、部品の搭載方法を提供することを目的としている。
【解決手段】部品搭載装置の制御ユニット5は、画像認識部101と、画像認識部102と、基準位置座標変換部103と、固定パラメータ記憶部104と、キャリブレーション部105と、フレーム・パラメータ記憶部106と、第1補正量算出部107と、第2補正量算出部108と、第3補正量算出部109と、搭載座標算出部110とから構成されている。また、制御ユニット5には、カメラ2〜3とアーム駆動部6が接続されている。
(もっと読む)
電子部品の実装装置及び実装方法
【課題】実装ツールに保持した半導体チップを基板に対して精度よく位置決めして実装できる実装装置を提供することにある。
【解決手段】実装ツール11に保持された半導体チップを撮像する部品カメラ13と、位置決めされた基板を撮像する基板カメラ15と、各カメラの撮像信号を画像処理する画像処理部17と、部品カメラの第1の撮像位置から基板カメラの第2の撮像位置まで移動するための第1の移動距離及び第1の移動距離に比べて短い第2の移動距離を設定する設定部21と、第1の撮像位置における半導体チップのずれ量と第2の撮像位置における基板のずれ量とから実装ツールの第1の移動距離を修正する修正距離を算出する演算処理部19と、修正距離を算出している間に実装ツールを第2の移動距離で移動させ、演算処理部が修正距離を算出したならば、その修正距離に基いて第1の移動距離を修正して実装ツールを第2の移動距離からさらに移動させる駆動制御部23を具備する。
(もっと読む)
ダイボンダ
【課題】高速化を図ることができるダイボンダを提供する。
【解決手段】チップ4ピックアップ後において、突き上げピン31の下降を開始すると同時に(S3)、突き上げユニット22の移動と(SC1)、ウエハホルダ11の移動と(SD1)、吸着式移動ステージ51の移動と(SF1)を同期して開始する。突き上げピン31の下降が完了したら(S4)、ウエハシート3の吸着を開放し(S5)、ウエハシート開放遅延時間待機する(S6)。次チップ4のピックアップポイント13への移動を完了したら、ウエハテーブル静止遅延時間待機した後(SD2)、ピックアップポイント13上のチップ4画像を取得して(SD3)、チップ4の位置補正を行って(SC3,SD4,SF2)、ピックアップに備える。
(もっと読む)
部品実装装置
【課題】部品供給部と基板保持部の間にピックアップヘッド、搭載ヘッド及び転写ヘッドの3つのヘッドがアクセス可能なツール保持部材を設置しつつも装置全体をコンパクトなものにすることができる部品実装装置を提供することを目的とする。
【解決手段】部品供給ステージ3及び基板保持ステージ4が並ぶY軸方向に移動自在に設けられたピックアップヘッド22、搭載ヘッド33及び転写ヘッド43それぞれの交換用のツール23a,34a,44aを保持したツール保持部材63を、部品供給ステージ3と基板保持ステージ4の間の領域R0にY軸方向と直交するX軸方向に移動自在に設けた移動テーブル15上の、ピックアップヘッド22の移動可能領域R1、搭載ヘッド33の移動可能領域R2及び転写ヘッド43の移動可能領域R3の重複領域Rに設けた。
(もっと読む)
電子部品実装装置
【課題】転写と描画の2通りのペースト供給方法を使い分けることができる電子部品実装装置を提供することを目的とする。
【解決手段】実装テーブル8を挟んで部品供給テーブル6と対向する側に位置し、基板24にペーストを供給するペースト供給手段が、基板24にペーストを転写する転写ヘッド5と、基板24にペーストを吐出して描画する描画ヘッド4とを備え、電子部品の品種に応じて転写ヘッド5もしくは描画ヘッド4の何れかを選択してペーストの供給を行うようにした。
(もっと読む)
1 - 20 / 36
[ Back to top ]