
Fターム[5H004GA08]の内容
フィードバック制御一般 (10,654) | 目的 (1,567) | 安定性向上(制御量の発振、発散防止) (124)
Fターム[5H004GA08]に分類される特許
1 - 20 / 124
ポンプ運転計画装置
駆動システム及び駆動方法、並びに露光装置及び露光方法
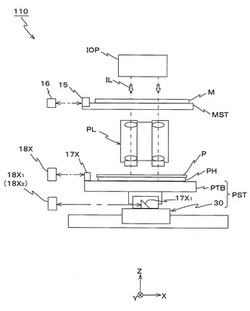
【課題】プレートステージを駆動する、高帯域でロバストな駆動システムを設計する。
【解決手段】 操作量に従って駆動されるプレートステージPSTの位置(第1制御量)X1を計測する干渉計18Xが設置されたプレートテーブルPTBが示す共振モードに対して逆相の共振モードを示すキャリッジ30に、プレートステージPSTの位置(第2制御量)X2を計測する干渉計18X1が設置される。干渉計18X及び干渉計18X1を用いることにより、プレートステージPSTの駆動する、高帯域でロバストな駆動システムを設計することが可能となる。
(もっと読む)
ネットワーク型制御システム、およびネットワーク型制御システムにおける通信遅延時間制御方法

【課題】通信遅延時間の変動を抑制しながら制御性能を維持してフィードバック制御によるプロセス管理を実行することが可能なネットワーク型制御システム、およびネットワーク型制御システムにおける通信遅延時間制御方法を提供する。
【解決手段】ネットワーク型制御システムは、管理対象プロセスの状態を制御する制御対象機器と、対象プロセスの状態量を計測する計測装置20Aと、制御対象機器および計測装置20Aにネットワーク30を介して接続され、計測装置20Aによる管理対象プロセスの状態量の計測値に基づいて制御対象機器をフィードバック制御する制御装置40とを有する。このネットワーク型制御システムは、ネットワークにおける通信遅延時間を演算する手段と、通信遅延時間が所定値以上になったときに、前記フィードバック制御を行うために前記ネットワークに送出する情報量を低減させる手段とを備える。
(もっと読む)
アクチュエータの制御方法及びアクチュエータの制御装置
【課題】最短時間制御にフィードバック制御の要素を取り入れると共に、制御終了後に制御出力を収束できるアクチュエータの制御方法及び制御装置を提供する。
【解決手段】最短時間制御を用いると共に、制御力の最大出力時の最大加速度αpと最大減速度αmを用いて、加速出力から減速出力へ切り替える切替時刻t1と、減速出力の終了時刻t2を算出し、計算時刻t0から切替時刻t1までは、アクチュエータの制御力を最大加速出力とし、切替時刻t1から終了時刻t2まではアクチュエータの制御力を最大減速出力とし、終了時刻t2では制御力の出力を終了すると共に、予め設定した時間毎に切替時刻t1と終了時刻t2を繰り返して算出して更新し、更に、制御系が持つ残り仕事と運動エネルギーの和である残留エネルギーの減少と共に、制御出力を小さくする。
(もっと読む)
制御装置及び方法
【課題】アドミッタンス制御の不安定化を緩和できる制御装置を提供する。
【解決手段】ロボット制御装置1は、推力を発生させるアクチュエータ12とエンコーダ15と力覚センサ11とを有したアーム10を制御する力制御手段3の内部に、アームの質量よりも小さな0でない質量を有した仮想物体について予め定められた、仮想質量md、仮想粘性cdおよび仮想物体に加えられる仮想的な力としての目標力fdの各パラメータを含む運動方程式を力覚センサ11で検出された接触力fを入力として用いて解くことで目標位置pdを算出する仮想物体運動算出手段7と、目標位置pdとエンコーダ15で検出されたアームの位置pとを入力としてプロクシベーストスライディングモード制御を用いてアームに加える推力gを算出し、これをアクチュエータ12への指令値とする位置制御手段8とを備える。
(もっと読む)
移動体の動作制御装置及びこれを用いたスロッシング制御装置
【課題】 移動体の状態を反映する画像情報をもとに、特徴量を抽出する手法を用いることはなく移動体を的確に制御することを可能にする移動体の動作制御装置を提供する。
【解決手段】 水を収容した水槽10と、水槽10を一方向に往復動させる駆動部12と、水槽10を視認するカメラ14と、カメラ14により取得された画像情報に基づき駆動部12により水槽10を制御して水槽10内の水を揺動状態から静止状態へ整定する制御部16とを備えるスロッシング制御装置であって、制御部16は、カメラ14から所定周期にしたがって順次取り込まれる水槽10中の水の画像情報を、数ベクトル空間を除くヒルベルト空間における1点と解釈して、安定化制御方法により、水槽10内の水を揺動状態から静止状態へ整定するようにモータ12を制御することを特徴とする。
(もっと読む)
追加型制御装置およびその制御方法
【課題】既設の主たる制御装置に、容易に追加して制御能力を向上させることができるようにする。
【解決手段】制御対象2の温度をフィードバック制御する主たる制御装置1から出力される主制御信号に基づいて、制御対象2を制御する追加制御信号を出力する追加型制御装置7であって、前記主制御信号を、前記主たる制御装置1と当該追加型制御装置7とが干渉しないように、前記追加制御信号に変換する変換手段を備え、前記変換手段は、前記主制御信号の操作量を演算して、該操作量に予め対応付けられた操作量の前記追加御信号に変換する。
(もっと読む)
差し迫った制御不安定性の検出
【課題】対象物に刺激を与えるシステムにおいて、差し迫った制御不安定性を検出してこれを回避する方法を提供する。
【解決手段】システム110は、刺激エフェクター120により対象物100に刺激が与えられている間にセンサー130により対象物の発振を示すシステムパラメータを表すパラメータ信号OSCを測定する。制御装置140はパラメータ信号の選択された周波数帯における支配的なトーンの最大振幅を監視し、最大振幅が指定された期間にわたって持続する場合、制御不安定性を回避する信号CSを刺激エフェクター120に与える。
(もっと読む)
制御系の評価装置およびその方法
【課題】 周波数特性に不確かさを有する制御対象を含む制御系の安定性を正確に評価する。
【解決手段】 特性データ取得部11は、制御器の周波数特性を取得する。変動データ取得部12は、制御対象のゲイン特性および位相差特性を取得する。伝達特性演算部13は、複素座標系において、ゲイン特性の変動範囲と位相差特性の変動範囲が重なる領域を制御対象の周波数特性の変動範囲として、周波数特性の変動範囲と制御器の周波数特性から制御系の一巡伝達特性とその変動範囲を演算する。評価部13は、一巡伝達特性とその変動範囲から制御系の安定性を評価する。
(もっと読む)
制御装置および制御方法
【課題】制御動作が不安定化するパラメータ設定が行なわれてしまう恐れを低減する。
【解決手段】制御装置は、設定値SPの変更による過渡応答時に有効な操作量上限値OHsを記憶する過渡操作量上限値記憶部3と、定常運転時に有効な操作量上限値OHgを記憶する定常操作量上限値記憶部4と、設定値SPの変更を検出する設定値変更検出部5と、過渡応答の完了を検出する過渡応答完了検出部6と、設定値SPの変更時点から過渡応答の完了時点までの時間帯では操作量上限値OHsを制御演算で使用する操作量上限値OHとして設定し、それ以外の時間帯では操作量上限値OHgを操作量上限値OHとして設定する操作量上限値切り替え部7と、制御演算により操作量MVを算出し、操作量MVを操作量上限値OH以下に制限する上限処理を実行して出力する制御演算部8とを備えている。
(もっと読む)
適応制御装置の設計方法
【課題】安定したプロセス制御を実現する適応制御装置の設計を速やかに行うことのできる適応制御装置の設計方法を提供することを目的とする。
【解決手段】プラント1、PI制御器3、適応制御器5の伝達関数を与える第1工程と、PI制御器3と適応制御器5とを合わせた制御系全体の伝達関数を求める第2工程と、制御対象の入力側に制御系外部から与えられる外乱を想定したときに、該外乱から出力までの伝達関数を、制御系全体の伝達関数とプラント1の伝達関数とを用いて表現する第3工程と、規範モデルを設定する第4工程と、規範モデルと第3工程で求めた伝達関数とによる部分モデルマッチングにより、PI制御器3における比例ゲイン及び積分ゲイン並びに適応制御器5の時定数を決定する第5工程とを有する適応制御装置の設計方法を提供する。
(もっと読む)
適応ノッチフィルタ、及びノッチフィルタのパラメタ調整方法
【課題】十分な位相余裕が確保されるようにノッチフィルタのノッチ幅を調整する。
【解決手段】適応ノッチフィルタは、ノッチフィルタと、該ノッチフィルタの幅を表すパラメタを調整するパラメタ調整部と、を備える。パラメタ調整部は、パラメタの候補値よりも広い幅を表す値を試行し、検出された振動が試行期間の完了まで基準内に収まっている場合にパラメタを候補値に設定する。検出された振動が基準を超えた場合に試行を中断して前記パラメタを試行前の値に戻してもよい。
(もっと読む)
プロセス制御システム
【課題】分散型制御装置による制御からに多変数モデル予測制御装置による制御への切り替えを、1制御周期の欠落もなく実行することができるプロセス制御システムを実現する。
【解決手段】プロセス出力値を共通に入力する分散型制御装置と多変数モデル予測制御装置とを、双方のステータス変更操作により切り替える機能を有し、分散型制御装置が稼動するスタンドバイモードのステータスから多変数モデル予測制御装置が稼動するコントロールモードのステータスに切り替える際に、多変数モデル予測制御装置は、所定の制御周期で分散型制御装置と多変数モデル予測制御装置に設定されているステータスの読み込み処理と、双方のステータスをコントロールモードに一致させるステータス等値化処理と、プロセスの制御演算処理と、演算結果を分散型制御装置側に渡す書き込み処理とを制御周期の期間中に少なくとも1回の追加ステータス等値化処理を実行する。
(もっと読む)
障害を弱めるための方法
【課題】障害が識別されるだけではなく、有効信号に対する影響ができる限り小さくなるように障害を弱め且つ最少化し、障害を受けていない有効信号のダイナミクスができるだけ維持されるように拡張する、直接制御量の障害を弱めるための方法を提供する。
【解決手段】操作量が有効信号であるときに、閉制御回路内の直接制御量の障害を弱めるための方法において、直接制御量がそれぞれ相連続する二つの走査時点で連続的に測定され、直接制御量の値が差し引かれ、この差の大きさが予め定められている基準値だけずれている場合に、少なくとも一つの制御パラメータが、障害に対する操作量の反応が最少化されるように変化される。
(もっと読む)
共振抑制装置及び共振抑制方法
【課題】ノッチフィルタの中心周波数を良好に調整する。
【解決手段】共振抑制装置は、制御系の共振を抑制するために当該制御系に設けられているノッチフィルタ12と、ノッチフィルタ12の中心周波数を更新する中心周波数演算部17と、中心周波数演算部17への入力信号の帯域を制限するための振動成分抽出部14であって、その通過帯域が中心周波数に連動して設定される第1のフィルタを含む振動成分抽出部14と、を備える。通過帯域は中心周波数の修正量が基準を下回る場合に中心周波数に連動して設定されてもよい。
(もっと読む)
フィードバック制御回路、フィードバック制御システム
【課題】回路規模やコスト、消費電力を低減しつつ、信号伝達遅延を抑制することが可能なフィードバック制御回路、及びこれを一部に含むフィードバック制御システムを提供する。
【解決手段】入力信号を増幅する増幅手段12と、前記増幅手段の出力信号に対して積分演算を行う一段以上の積分手段30と、前記積分手段の少なくとも一部をバイパスして信号を伝達する一以上のフィードフォワード経路FF1と、前記積分手段から入力される信号と前記フィードフィードフォワード経路を介して入力される信号を加算する加算手段22と、前記加算手段の出力を量子化して出力信号を生成する量子化手段32と、前記量子化手段により生成される出力信号を、前記一段以上の積分手段のうち最終段の積分手段の入力側に伝達するフィードバック経路FB1と、を備えるフィードバック制御回路。
(もっと読む)
ロボットおよびその行動制御システム
【課題】上体の運動によって指定タスクを実行しながら、継続的に安定することができるロボット等を提供する。
【解決手段】本発明のロボット1または行動制御システム2によれば、確率遷移モデルにしたがって、腕体の運動状態を表わす「第1状態変数」の時系列的な変化態様が、第1状態変数のうち少なくとも1つがロボット1に指定タスクを実行させるための第1指定運動軌道{r}に追従するように生成される。また、同じく確率遷移モデルにしたがって、上体の運動状態を表わす「第2状態変数」の時系列的な変化態様が、第2状態変数が継続的に安定な動力学的条件を充足するように生成される。
(もっと読む)
バッチプロセスを制御するためのシステムおよび方法
【課題】バッチプロセスを制御するためのシステムおよび方法が提供される。
【解決手段】バッチプロセスをシミュレートするために、第1原理モデルが用いられ、この第1原理モデルは、バッチプロセスを制御するために、多重入力/多重出力制御ルーチンを構成するのに用いられ得る。第1原理モデルは、実際のバッチプロセスの動作の間に測定することができず、または測定されないバッチ変数の推定値を発生することができる。このような変数の例としては、バッチプロセスの構成成分(例えば、生成速度、細胞成長速度等)の変化速度であってもよい。第1原理モデルおよびその構成された多重入力/多重出力制御ルーチンは、バッチプロセスの制御を容易にするために用いられ得る。
(もっと読む)
プロセス制御データを収集する方法および装置
【課題】プロセス制御データを収集するための方法、装置、および製造物品を開示する。
【解決手段】プロセス制御データを収集するための例示的方法は、測定されるパラメータおよび測定サンプリングレートを記述する電子デバイス記述を登録することと、その測定サンプリングレートに基づいてパラメータを測定することと、測定されたパラメータを代表するデータをデータ構造に保存することと、データの要求、データと関連付けられる状態、またはデータと関連付けられるイベントのうちの少なくとも1つに応答して、プロセス制御ネットワークを介して、データ構造内のデータを第1のプロセス制御デバイスに転送させることと、を含む。
(もっと読む)
外乱オブザーバ、フィードバック補償器、位置決め装置、露光装置、及び外乱オブザーバ設計方法
【課題】設計者が試行錯誤することなく決定した伝達関数に基づく位相進み補償器と位相遅れ補償器により、共振の位相を安定化させることが可能な外乱オブザーバ、フィードバック補償器、位置決め装置、露光装置、及び外乱オブザーバ設計方法を提供する。
【解決手段】
制御対象28に加わる外乱dを推定する外乱オブザーバ21において、外乱オブザーバ21は、制御対象28の共振成分を外乱dの一部として含んだ外乱モデルに基づいて相補感度関数のパラメータが設計されたことを特徴とする。
(もっと読む)
1 - 20 / 124
[ Back to top ]