
Fターム[5H004HB04]の内容
フィードバック制御一般 (10,654) | 検出量の種類 (1,307) | 濃度、密度、pH (43)
Fターム[5H004HB04]に分類される特許
1 - 20 / 43
保守ツール及び制御装置の保守ツール
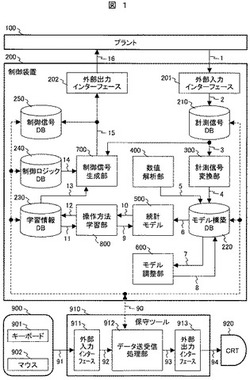
【課題】統計モデルを構築する際に用いるデータに偏りが存在する学習型のプラントを制御する場合でも、高精度な統計モデルを構築して所望の制御効果を獲得可能な保守ツールを提供する。
【解決手段】本発明の保守ツールは、モデル構築データベース220に保存されたモデル調整の反復回数の情報、及び疎密度の変化の情報に基づいて、モデル調整の反復回数mに対して変化する疎密度の推移を表示するように構成した。
(もっと読む)
モデリング装置および該方法

【課題】本発明は、先験的知識を利用することによって不充分な入出力データであっても、より精度の高いモデルを構築し得るモデリング装置および該方法を提供する。
【解決手段】本発明のモデリング装置Sは、システムのモデルをそのパラメータの値を決定することで構築する装置であって、前記モデルが、連続した時間と見なされる時間変数を含む数式であり、予め得られているシステムに関する先験的情報を制約条件として設定する制約条件入力設定部21および制約条件記憶部41と、所定の入力データを実績入力データとしてシステムに入力した場合に出力された実績出力データと、前記実績入力データをモデルに入力した場合に出力されたモデル出力データとの誤差を評価する評価関数の評価結果を求める評価演算部13と、前記制約条件を満たし、かつ、前記評価結果が最良となるように、前記モデルのパラメータの値を求めるモデル更新決定部14とを備える。
(もっと読む)
プラントの制御装置及び火力発電プラントの制御装置
【課題】本発明の目的は、プラントの計測データを使用してRBFネットワークによる統計モデルをオンラインで調整する場合に、制御周期以内での最適化計算の終了を可能にして、統計モデルの推定精度を向上させたプラントの制御装置を提供することにある。
【解決手段】本発明のプラントの制御装置は、プラントに制御信号を与えた時に取得する計測信号の値を推定する統計モデルと、統計モデルの構築に用いるデータを保存するモデル構築データベースと、計測信号に対して統計的処理を施し、モデル構築データを生成するデータ前処理部と、モデル出力が目標値を達成するようにモデル入力の生成方法を学習する操作方法学習部と、モデル構築データベースに保存される情報に含まれる統計モデルの半径パラメータを調整するモデル調整部とを備え、統計モデルはモデル調整部による半径パラメータの調整結果を用いてモデル出力を生成するように構成する。
(もっと読む)
制御装置
【課題】離散時間系の制御対象モデルを用いて、所定の拘束条件が複数のモデルパラメータ間に存在する制御対象や、1次遅れなどの遅れ特性を有する制御対象を制御する場合において、制御精度および制御の安定性を向上させることができる制御装置を提供する。
【解決手段】制御装置1は、ECU2を備える。ECU2は、2つのモデルパラメータα,1-αを含む制御対象モデルを整理し、モデルパラメータαが乗算されていない項および乗算されている項を制御対象モデルの左辺および右辺にそれぞれ振り分けるとともに、左辺を合成信号値W_actとし、右辺を推定合成信号値W_hatとしたときに、合成信号値と推定合成信号値との間の同定誤差eid'が最小となるように、モデルパラメータαの同定値αidをオンボードで算出し、この同定値αidと制御対象モデルから導出された制御アルゴリズム(式(34),(35))とを用いて、空燃比補正係数KAFを算出する。
(もっと読む)
プロセス制御データを収集する方法および装置
【課題】プロセス制御データを収集するための方法、装置、および製造物品を開示する。
【解決手段】プロセス制御データを収集するための例示的方法は、測定されるパラメータおよび測定サンプリングレートを記述する電子デバイス記述を登録することと、その測定サンプリングレートに基づいてパラメータを測定することと、測定されたパラメータを代表するデータをデータ構造に保存することと、データの要求、データと関連付けられる状態、またはデータと関連付けられるイベントのうちの少なくとも1つに応答して、プロセス制御ネットワークを介して、データ構造内のデータを第1のプロセス制御デバイスに転送させることと、を含む。
(もっと読む)
プラントの制御装置及び火力発電プラントの制御装置
【課題】本発明の目的は、将来的に予測されるプラントの運転状態の変化をも考慮に入れた、プラントの環境負荷物質低減及び運転効率改善を実現する制御ロジックを自律学習する機能を具備させることで、プラントの運転条件変更に対してロバストな制御を提供する。
【解決手段】本発明のプラントの制御装置は、運転情報データベースと運転特性計算部の組み合わせ又は機器情報データベースと機器特性計算部の組み合わせのいずれか一つを含み、前記運転特性計算部、又は機器特性計算部が計算した特性値を用いてプラントの運用コストを評価するコスト評価部と、前記コスト評価部が出力するコスト評価値が最適となるようにプラントに与える制御信号の生成方法を自律学習する操作方法学習部とを備え、前記操作方法学習部は、前記コスト評価部が出力するコスト評価値を手掛かりに操作方法を学習するように構成する。
(もっと読む)
プラントの制御装置及び火力発電プラントの制御装置
【課題】本発明の目的は、数値解析データと実際のプラント特性との誤差が大きい場合においても、計測データによるモデル修正を短期間で終了できる、又は、データ蓄積による統計モデル構築時間増加を回避できる機能を具備したプラントの制御装置又は火力発電プラントの制御装置を提供することにある。
【解決手段】プラントに制御信号を与えた時に取得する計測信号の値を推定する統計モデルと、前記統計モデルの構築に用いるデータを保存するモデル構築データベースと、モデル出力が目標値を達成するようにモデル入力の生成方法を学習する操作方法学習部と、前記モデル構築データベースに保存される情報に含まれる解析モデルデータの選択、又は計測モデルデータを削除する機能を具備するモデル修正部とを備え、前記統計モデルは前記モデル修正部によるモデルデータの修正結果を用いてモデル出力を生成する制御装置。
(もっと読む)
プロセス制御システム
【課題】制御ノウハウに相当する制御ロジックを自動的に作成すると共に、今制御ロジックがどのように動作するかを確認することができるプロセス制御システムを提供する。
【解決手段】プラント10のプロセスを制御するプロセスコントローラ21に対し、プロセスを制御するための、各種の状態信号や測定値、制御目標値、及び制御量を含むプロセスデータを蓄積するデータ保存部32を設け、この蓄積されたプロセスデータから、プロセスの状態量に対する制御目標値を満足する制御量及び制御結果に関するデータを用い、制御ロジック作成装置31で、これらデータ相互の関係から制御ノウハウに相当する好適な制御ロジックを作成する。作成された制御ロジックは、制御シミュレーション機能33、プロセスシミュレーション機能34を有するシミュレータ35でシミュレートし、検証された制御ロジックがプロセスコントローラ21の制御ロジックとして適用される。
(もっと読む)
電気エネルギーを生成する風力発電機を制御する方法
先進的プロセス制御(advancedprocesscontrol)と実時間最適化(real−timeoptimization)との経済性に基づく協調
先進的プロセス制御と製造プロセスの実時間最適化とを協調させるためのシステムおよび方法が、提供される。システムおよび方法は、制御され最適化されるべき製造プロセスに対応するプロセスデータおよび経済的データを受け取る。プロセスデータ、経済的データおよびプロセスの非線形定常状態モデルに基づいて、経済的目的関数が、実時間最適化モジュールによって計算される。その後、引き下げられた次数の、経済的目的関数の非線形近似が、実時間最適化モジュールによって計算され、先進的プロセス制御モジュールに送られる。先進的プロセス制御モジュールは、制約された経済最適に向けて製造プロセスを制御するために、引き下げられた次数の、経済的目的関数の非線形近似を使用する。  (もっと読む)
(もっと読む)
多段プロセスとその制御
多段プロセスを制御する方法を提供する。本プロセスは、原料から中間製品を生成する複数の第1段階プロセスと中間製品から最終製品を生成する複数の別段階プロセスとを含む。第1段階プロセスは複数の中間プロセスを含み、別段階プロセスは最終製品を生成する複数の最終プロセスを含む。中間制御装置は最終製品EPの1つまたは複数の製品特性に応じて第1段階プロセスを制御し、別の制御装置FCは中間製品の製品特性に応じて別段階プロセスを制御する。多段プロセスは、最終プロセスと中間プロセスのそれぞれにプロセス値を割り当てる工程を更に含む。中間制御装置ICは、最終製品を生成するための全体プロセス値を最適化するように中間プロセスの動作を制御する。最終制御装置FCは全体プロセス値を最適化するように中間制御装置ICの動作に応答する。 (もっと読む)
内燃機関の燃料噴射制御装置
【課題】内燃機関の運転状態の検出結果の信頼性が低下し、制御誤差が一時的に増大するような条件下でも、制御誤差を適切かつ迅速に補償でき、それにより、安定した燃焼状態を確保でき、燃焼時のノイズを抑制することができる内燃機関の燃料噴射制御装置を提供する。
【解決手段】制御装置1の噴射時期コントローラ30は、実着火時期Cmbを目標着火時期Cmb_TRGTになるように、FB項Inj_FBを算出し、図7,8のマップから算出した値Bs_Inj,IEGR_Injと、4つの修正値DBs_Inj,DBs_NVInj,DIEGR_Inj,DIEGR_NVInjとを加算することにより、FF項Inj_FFを算出し、FF項Inj_FFにFB項Inj_FBを加算することにより、目標噴射時期Inj_TRGTを算出する。2つの修正値DBs_Inj,DIEGR_Injは、追従誤差EIgが値0になるように算出される。
(もっと読む)
外乱制御装置、外乱制御方法、外乱制御プログラムおよび記録媒体
【課題】多入出力プラントにモデル予測制御を適用した場合においても、外乱抑制性能を向上させ、少ない計算量で低コストに実現でき、ステップ応答試験の結果のみから構成可能であって、且つモデル予測制御の操作量制約を逸脱しないことを可能にする外乱制御装置等を提供する。
【解決手段】制御装置40は、モデル予測制御機能10により計算された制御量予測値y*と多入出力プラント30から出力された制御量信号yとの差である制御量予測誤差eを計算する制御量予測誤差計算部42と、予めモデル予測制御機能10により取得されたステップ応答終端値dPVと制御量予測誤差計算部42により計算された制御量予測誤差eとに基づき外乱推定値d*を計算する外乱推定部44と、外乱推定部44により計算された外乱推定値d*に基づきモデル予測制御機能10により計算された操作量uを修正した修正操作量umodを出力する外乱抑制部46とを備えている。
(もっと読む)
プラントの制御装置及び火力発電プラントの制御装置
【課題】制御対象の特性が複雑で情報が不完全なプラントの制御において、制御装置に内包された探索手段により自律的に抽出した、効率的な問題解決のための学習指針を用いることで、望ましい操作方法を制御周期以内で学習可能なプラントの制御装置を提供する。
【解決手段】本制御装置は、プラントに制御信号を与えた時に取得する計測信号の値を推定するモデルと、モデル出力が目標値を達成するようにモデル入力の生成方法を学習する操作方法学習部と、操作方法学習部における学習の制約条件及び学習結果に関する情報を保存する学習情報データベースと、所望のモデル出力が得られる運転条件に相当するモデル入力を探索する最適解探索部と、最適解探索部における探索の制約条件及び最適解探索に関する情報を保存する探索情報データベースとを備え、操作方法学習部は、最適解探索部で得られた最適な運転条件に関する情報を用いてモデル入力を生成する。
(もっと読む)
制御パラメータの適合化システム
【課題】事前に目標となる数値を定めることが困難な制御システムにおいても、最適な適合値を自動的に推定する。
【解決手段】エンジン1から排出される排気ガスの各成分量を分析する排気ガス分析計20の出力に基づいてECU10による空燃比制御における目標空燃比の指示値を制御部40で生成し、排気ガス分析計20及びエンジン1のO2センサの出力に基づいて状態評価部30で空燃比の制御状態を評価する。そして、状態評価部30の評価結果に基づいて制御部40で生成した指示値を適合値推定部50で調整して目標空燃比が最適な値となるように適合させ、最終的にECU10に格納される目標空燃比を確定する。これにより、空燃比目標値を予めマップに格納しておく場合等に、開発者の経験が必要なマップ作成作業を自動的且つ効率的に行なうことが可能となり、車両開発時における工数を低減してコスト低減を図ることができる。
(もっと読む)
プラント運転システム
【課題】
複数の入力項目と複数の出力項目を有するプラントを対象として、トレードオフの関係にある出力項目の値を考慮した操作量を迅速に決定できるプラント運転システムを提供する。
【解決手段】
複数のプラントの出力項目のそれぞれについて出力許容範囲を設定する出力許容範囲設定部82と、全ての出力項目の値が出力許容範囲設定用図形86で設定した出力許容範囲内となるプラントの操作項目の操作量の組合せである許容操作量を求める許容操作量取得部52と、許容操作量の値、又は許容操作量の値の存在範囲を画面に表示する許容操作量表示部54と、許容操作量に対応する出力項目の値を画面にグラフ表示する出力項目グラフ表示部56と、を備えた。
(もっと読む)
内燃機関の空燃比制御装置
【課題】経年変化によらず内燃機関の運転状態を正確に判定し、判定された運転状態に応じて高精度な制御が可能な内燃機関の空燃比制御装置を提供する。
【解決手段】内燃機関の空燃比制御装置が、実際の燃料噴射量である実燃料噴射量u及びその噴射による空燃比である実空燃比yを保存する記憶手段と、保存された実燃料噴射量u及び実空燃比yに基づいて所定時間経過後の内燃機関の運転状態である先読み運転状態fcを推定する運転状態推定手段と、保存された実燃料噴射量u及び実空燃比y並びに先読み運転状態fcに基づいて前記所定時間経過後の空燃比である先読み空燃比faを推定する空燃比推定手段と、先読み空燃比faに基づいて燃料噴射量を補正する燃料噴射量補正手段とを具備する。
(もっと読む)
プラントの制御装置、及び火力発電プラントの制御装置
【課題】本発明の目的は、予測モデルの特性が実際のプラントの特性と相違する場合でも、プラントの制御特性を良好に維持できるプラントの制御装置を提供する。
【解決手段】本発明のプラントの制御装置は、プラントに対する操作信号を生成する操作信号生成手段と、プラントの特性を模擬するモデルと、モデルで模擬した出力信号が予め設定された目標を満足するようにモデルの入力信号を生成する学習手段と、学習手段での学習結果に従って学習信号を計算する学習信号生成手段とを備え、更に、ある操作信号及び更新した操作信号をプラントに与えた結果として取得した該プラントの第1の計測信号及び第2の計測信号とその目標値との誤差である第1の誤差及び第2の誤差をそれぞれ計算する操作結果評価手段と、第2の誤差が第1の誤差よりも大きい場合に操作信号生成手段で生成する操作信号の補正信号を生成する補正信号生成手段とを備えるように構成した。
(もっと読む)
深冷蒸留装置の制御方法
深冷蒸留分離装置の制御方法において、少なくとも1つの操作変数が変更され、各操作変数は少なくとも1つの制御変数を用いて変更されており、それによって各制御変数は、一つの制御方法を用いて調節され得、1つの制御変数の少なくとも1つのセットポイントを制御するために予測制御方法が使用される。  (もっと読む)
(もっと読む)
プラントの制御装置
【課題】本発明の目的は、修正したモデルを用いた学習を高速化して制御アルゴリズムを修正しプラントを精度良く制御するプラントの制御装置を提供する。
【解決手段】本発明のプラントの制御装置は、プラントの運転特性を解析する数値解析実行部と、の数値解析結果の情報を基にプラントの制御特性を模擬するモデルと、前記モデルを用いてプラントの操作方法を学習する学習部と、前記学習部の学習情報データを保存する学習情報データベースと、前記学習部の学習情報データを基に状態入力をモデル入力次数より少ない入力数で表現するパターンデータを生成するパターン生成部と、前記パターン生成部で生成したパターンデータを保存するパターンデータベースと、複数のパターンを用いて学習した学習結果の中から制御効果の良い学習結果を選択する学習結果判定部を備え、選択した学習結果に基いて操作信号生成部でプラントに対する操作信号を算出するように構成。
(もっと読む)
1 - 20 / 43
[ Back to top ]