
Fターム[5H004JB21]の内容
フィードバック制御一般 (10,654) | 検出部(オブザーバを含む) (399) | オブザーバ (119)
Fターム[5H004JB21]の下位に属するFターム
Fターム[5H004JB21]に分類される特許
1 - 20 / 26
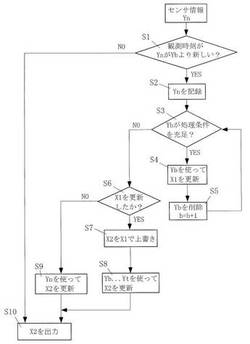
センサ情報の統合方法と装置
【課題】誤差と計算量を増大させずに複数のセンサ情報を統合することができる方法と装置を提供する。
【解決手段】新たに受信したセンサ情報Ynを、観測時刻の順に記録し、各センサ情報に対し、第1条件を満たすか否かを判定する(S3)。第1条件は、「そのセンサ情報の観測時刻と同じかそれよりも新しいセンサ情報がすべてのセンサから受信されていること」である。第1条件を満たす場合に、第1条件を満たす各センサ情報6を観測時刻順に用いて、内部状態を予測し、第1推定値X1を予測した内部状態に更新して記憶し、第2推定値X2を更新した第1推定値X1で上書きし、更新に用いたセンサ情報を削除する(S4,S5,S7,S8)。第1条件を満たさない場合に、新たに受信したセンサ情報Ynを用いて、内部状態を予測し、第2推定値X2を予測した内部状態に更新して記憶する(S9)第2推定値X2を対象物の内部状態として出力する(S10)。
(もっと読む)
スライディングモード制御装置の制御入力設定方法

【課題】スライディングモード制御装置において、切換入力の平滑関数パラメータを理論的に決定できるようにする。
【解決手段】平滑関数パラメータδを、定常偏差σと切換入力unlとを座標軸とする座標上で定常偏差限界σeに安全率を見込んだ値σth[σe−安全率]と入力変動最大値dmaxとによって定まる点Paと座標の原点[0,0]とを結ぶ直線Laよりも切換入力軸側の範囲で設定することで、定常偏差限界σeの時に切換入力unlが入力変動最大値dmaxよりも上回るようになり、入力変動に対するロバスト性を確保することができる。このように、平滑関数パラメータδを、σ−unl座標を用いて定常偏差限界σeと入力変動最大値dmaxとに基づいて設定することで、平滑関数パラメータδを理論的に設定することが可能となり、作業者によるチューニング結果やチューニング工数のばらつきを低減することができる。
(もっと読む)
フィードバック制御装置
【課題】制御開始時の値付近での実制御量の停滞による応答遅れの増大が発生したときの実制御量のオーバーシュートを好適に抑制することのできるフィードバック制御装置を提供する。
【解決手段】第2ピストンの実変位RYを含むCSC2の状態量の検出及び推定を行うオブザーバー6と、目標軌道に追従して実変位RYが推移するように上記状態量に基づきマスターシリンダー1の供給電流を操作するとともに、実変位RYと目標軌道との偏差Eの累積値である誤差積分値Zに応じて供給電流を操作する積分器5を有したスライディングモードコントローラー4と、を備えるフィードバック制御装置において、実変位RYが制御開始時の値付近で停滞しているか否かを判定するとともに、停滞有りと判定されたときに、目標軌道及び推定状態量X0,X1,X2の初期化を指示する停滞監視部7を備えるようにした。
(もっと読む)
圧力制御装置及び圧力制御方法
【課題】サーボモータにより動力伝達手段を介して作動体を動作させて受圧体に与える力を、ロードセル等を使わずに正確に制御し、機械の構成を簡単にし、信頼性を得る。
【解決手段】サーボモータ11により射出圧力を制御する電動射出成形機1の制御装置15は、電動射出成形機1の制御モデルに対して構築され射出スクリュー5が発生する力を推定するオブザーバ19と、サーボモータ11に対する電流指令値Iとパルスエンコーダ14の回転位置θとによりオブザーバ19が推定した力を入力して射出スクリュー5に作用させる力をフィードバック制御する射出圧力フィードバック制御部20とを備え、オブザーバ19は、電流指令として重畳させた振動に応じて生じる抗力が、機械インピーダンス要素を介して被駆動部に作用する力を外乱として同定した制御モデルに基づいて構成される外乱オブザーバ部を備え、被駆動部に作用する力を推定する。
(もっと読む)
状態推定装置及び制御装置
【課題】制御対象の状態(例えば速度)を精度良く推定でき、且つ、サンプル遅れを防止可能な状態推定装置を提供する。
【解決手段】制御対象であるプラントへの制御入力と前記プラントの状態とに基づき前記プラントの状態変数を推定する、オブザーバを含んで構成された状態推定装置11において、前記オブザーバは、前記プラントの状態のサンプリング値であって時間間隔が互いにN(Nは2以上の整数)サンプル離れたサンプリング値と、前記制御入力の連続するサンプリング値とに基づいて、前記状態変数を推定する。
(もっと読む)
モデル予測制御においてフィードバック及びフィードフォワードを組み合わせるための方法及びシステム
【課題】非線形プラントにおけるモデルの不確実性の影響を最小化するために、フィードフォワード及びフィードバック制御を組み合わせる。
【解決手段】センサ信号プロセッサ140は、エンジン120上に配置された複数のセンサ110からの信号に基づいて、エンジンに関するパラメータ間の関係を決定して、エンジンと関連付けられているアクチュエータ130に対するフィードフォワード信号を算出し、モデルベース予測フィードバックコントローラ200に関する複数の制約条件をフィードフォワード信号の関数として処理するためのストラテジを提供する。アクチュエータ信号プロセッサ150は、アクチュエータに対する制御信号を、フィードバック信号及びフィードフォワード信号の総和として生成し、アクチュエータに送信する。制御信号に含まれるフィードバック信号が、外乱に関する不確実性の影響を最小化することができる。
(もっと読む)
モデル不一致を補償するためチューニング可能積分コンポーネントを備えるモデル予測コントローラ
MPCコントローラ技法はMPCタイプのコントローラで今日一般的に使われている方法より良好にフィードバック制御性能を統合し、プロセスモデル不一致の存在下で従来のMPC技法より良好に機能するMPCコントローラをもたらす。具体的には、チューニング可能積分ブロックをMPCコントローラに加えることでMPCコントローラの性能が強化される。このチューニング可能積分ブロックは、予測誤差や他の制御誤差を示す積分コンポーネントを形成し、このコンポーネントをMPCコントローラアルゴリズムの出力へ加えることで、予測誤差のそもそもの究極的理由であるモデル不一致の存在下でより迅速又は良好な制御を提供する。この技法により、MPCコントローラはより速やかに反応し、且つMPCコントローラのロバスト性を低下させることなく、モデル不一致の存在下でより良好な設定点変更及び負荷変動性能を提供することが可能となる。  (もっと読む)
(もっと読む)
モータ制御装置及びその設計方法
【課題】 モータ駆動等による多慣性共振特性を持つ機械装置の運動制御において、機械装置の振動を抑制しつつ、適切な指令応答特性を得ることのできる制御装置を提供する。
【解決手段】 モータ制御装置は、モータと負荷及びこれらを結合する結合部とを含む多慣性共振系を制御対象とし、制御指令値と制御対象からフィードバックされる状態量との差に基づいてモータを制御する閉ループ制御系を備え、該閉ループ制御系はモータ速度指令からモータトルク指令を決定する第1の制御手段を含むほか、前記状態量に応じて振動を抑制する制振制御器10を備える。前記第1の制御手段の第1のゲイン、前記制振制御器の第2のゲインを、閉ループ制御系の感度特性のカットオフ周波数ωS、閉ループ制御系の相補感度特性のカットオフ周波数ωCSを調整パラメータとして決定する。
(もっと読む)
モータ制御装置及び制御方法
【課題】 いかなる条件でサーボシステムが不安定になった場合にも発振して暴走するような危険な状態を回避することができるモータ制御装置及び制御方法を提供する。
【解決手段】 駆動系の発振状態を検出する発振検出部103と、トルク指令urefを予め設定したリミット値TLIMT以下に制限するリミット演算部5と、発振検出部103が発振を検知して発振中であると判断している間のみ、トルク指令urefをリミット演算部5を介して出力する切り替えスイッチ1、及び積分制御器3への入力をオフとする切り替えスイッチ2とを備えた。
(もっと読む)
制御器、制御方法および制御プログラム
【課題】試行回数(学習時間)を減少させて、実タスクへ適用可能な方策勾配法のアルゴリズムを利用した制御器を提供する。
【解決手段】制御信号を制御対象に与える処理を行って、制御対象の状態量を観測器(たとえば、位置センサ、角度センサ、加速度センサ、角加速度センサなど)で観測し、この観測結果により定常分布の対数の偏微分を推定し、これを用いて、新しい自然方策勾配である「自然定常方策勾配」を推定して、方策パラメータを更新し、これにより方策を更新する。そして、更新された方策により、さらに、制御対象が制御される。
(もっと読む)
線状構造体位置制御システム、線状構造体の位置制御方法及び移動構造体制御システム
【課題】掘削船から延びるライザー管のリエントリ作業を短時間に効率よく行う。
【解決手段】掘削船から延びるライザー管のリエントリ作業を行う際、ライザー管の掘削船に対する傾斜角度と、ライザー管の下端の位置と、掘削船の現在の位置の情報とを計測し、計測した傾斜角度の情報と、下端の位置の情報と、掘削船の現在の位置の情報とに基づいて、指定された掘削船の指定位置に対するフィードバック制御信号を生成し、このフィードバック制御信号を、掘削船に搭載された位置制御装置に供給する。
(もっと読む)
サーボ制御装置
【課題】 モータ位置検出器を用いずに負荷位置検出器のみで安定且つゲインを大きく設定することができるようにする。
【解決手段】 負荷位置検出器と負荷位置検出値を用いて負荷加速度と躍度を演算する微分器と、それぞれにゲインを乗じて補償信号を算出する補償器と補償器の出力をトルク指令値に加算する加算器を備える。
(もっと読む)
リニアアクチュエータ
【課題】位置情報の差分値とサンプル時間に依存することなく速度情報を生成して制御帯域を上げることを可能とするリニアアクチュエータを実現する。
【解決手段】面モータを有するスライダの位置検出値と位置指令値との偏差を演算して速度指令値を出力する位置制御手段と、前記スライダの速度検出値と前記速度指令値との偏差を演算して前記面モータに推力指令を出力する速度制御手段とを具備するリニアアクチュエータにおいて、
前記位置検出値及び前記推力指令に基づいて、前記速度検出値を推定演算する状態推定器を備える。
(もっと読む)
柔軟アームを有する移動ロボット
【課題】柔軟アームを有する移動ロボットにおいて、柔軟アームの振動および姿勢を、走行路面の環境に左右されることなく、安定的にかつ有効に制御すること。
【解決手段】走行機体およびブーム104にセンサ110〜116を取り付けて最小限の状態変数を計測し、計測できない状態変数はオブザーバによって推定して、ブーム104の姿勢および振動を状態フィードバック制御する。また、フィードバック制御に加えて、目標値変動補償用のフィードフォワード制御および外力軽減用のフィードフォワード制御を併用する。
(もっと読む)
ゲインスケジューリング制御のためのシステム
ゲインスケジュールドフィードバックコントローラ10、11、30、40によって起動することができる、非線形プラント18を制御するシステム。様々なゲインを有する幾つかの線形サブコントローラ13、25、26、101、102を1つのユニットとしてまとめることができる。外因性パラメータ又は内因性パラメータに従って、1つのサブコントローラ13、25、26、101、102から別のサブコントローラに切り換えることによって、コントローラ10、11、30、40全体を変更させることができる。切換器に対する信号21は、特定の時点に発生するプラント18の動作範囲を反映し、それらの時点においてプラント18の出力信号17及び入力信号16に関連してシステムから所望されるゲインを示すことができる。本手法の利点は、大域的及び局所的の両方の、公称安定性及びロバスト安定性を保証すること、産業実務者によく知られている制御構造の使用を可能にすること、及び本手法の実施のために高度な数学的技法を一切必要としないことを含むことができる。 (もっと読む)
ヘッド位置制御方法、ヘッド位置制御装置およびディスク装置
【課題】外乱抑圧機能を持つ外乱オブザーバ制御による位置決め制御装置において、外乱周波数を抑圧しても、制御特性の変更を防止する。
【解決手段】アクチュエータのモデルと外乱のモデルを含む外乱オブザーバ制御により、推定位置誤差に従い、アクチュエータの推定ゲイン(L1〜L2)と外乱の推定ゲイン(L4,L5)を用いて、アクチュエータ(1)の制御値を演算する際に、推定位置誤差e[k]に従って、外乱周波数を推定し、前記外乱周波数に対応したアクチュエータ(1)の推定ゲイン(L1,L2)と外乱の推定ゲイン(L4,L5)を変更する。外乱周波数に応じて適切なオブザーバ制御が実現できる。
(もっと読む)
移動体のサーボ制御装置及びレーザ加工装置
【課題】補償効果に優れる移動体のサーボ制御装置およびレーザ加工装置を提供することおよび付加入力の演算に語長制限がある場合でも十分な補償効果を持たせる。
【解決手段】フィードバック・ループを備え、移動体を位置指令データに基づいて位置決めする移動体のディジタルサーボ制御装置において、位置指令データを受けた時刻におけるフィードバック・ループの状態量に関する伝達関数に対して、フィードバック・ループに固有の極を相殺するような零点を付加するディジタル・フィルタ10a、10b(付加入力手段)を設け、位置指令データに加えてディジタル・フィルタ10a、10bの出力をフィードバック・ループに入力して前記移動体を位置決めする。また、ディジタル・フィルタを縦続型構造とし、この構造を構成する伝達関数が複素平面上で接近した極と零点を持つようにして、演算に語長制限がある場合でも十分な補償効果を得る。
(もっと読む)
時定数自動推定方法及び時定数自動推定装置並びにサーボモータ制御システム
【課題】時定数の調整に手間や時間をかけることなく、簡単な計算で容易に推定することができ、サーボモータ調整時の作業負担の軽減を図ることができる時定数自動推定方法及び時定数自動推定装置並びにサーボモータ制御システムを提供する。
【解決手段】読み込まれた動作プログラムを動作させることによって、サーボモータの加減速時の時定数を自動で推定するための時定数自動推定装置6であって、テスト運転のために予め用意してある仮時定数でサーボモータを加速動作させたときのピーク電流値を検出する電流値検出手段8と、ピーク電流値と仮時定数との関係から、本制御時にサーボモータを所望の目標電流値で実際に動作させる際の本時定数を推定する時定数推定手段9と、を備える。
(もっと読む)
自己組織化マップを用いる装置、その方法及びプログラム
【課題】数少ないトレーニングケースから汎化性の高い制御を実現することができる装置を提供する。
【解決手段】装置内に複数存するニューラルネットワークのモジュールからなるユニットのうち、最も次時刻の制御対象の予測状態を正しく予測した予測器を含むユニットに係る制御器の制御信号を採用して制御対象を制御するので、即時性の高い制御を実現することができると共に、自己組織化マップを形成することができる。
(もっと読む)
制御装置
【課題】 位相遅れやむだ時間などが比較的大きい制御対象を制御する場合において、制御対象の入出力間での制御タイミングのずれの解消、および制御精度の向上をいずれも達成することができる制御装置を提供する。
【解決手段】 制御装置1のECU2は、状態予測器22およびDSMコントローラ24を備える。状態予測器22は、予測アルゴリズムに基づき、出力偏差VO2の予測値PREVO2を所定の算出周期ΔTkで算出し、DSMコントローラ24は、ΣΔ変調アルゴリズムに基づき、算出された予測値PREVO2に応じて、目標空燃比KCMDを、予測値PREVO2の算出周期ΔTkよりも短い算出周期ΔTmで算出する。
(もっと読む)
1 - 20 / 26
[ Back to top ]