
Fターム[5H004KA65]の内容
フィードバック制御一般 (10,654) | 制御部 (412) | 単一制御対象に対し複数制御部を持つもの (34)
Fターム[5H004KA65]の下位に属するFターム
制御部を切り換えるもの (18)
同期をとるもの (5)
Fターム[5H004KA65]に分類される特許
1 - 11 / 11
エネルギー総和抑制制御装置、電力総和抑制制御装置および方法
【課題】ステップ応答制御においてエネルギー使用量が一定値を大幅に超えないように、かつ設定値への追従特性が損なわれないようにする。
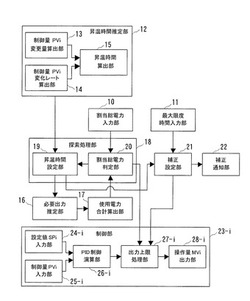
【解決手段】電力総和抑制制御装置は、各制御ループの操作量を特定の値にした場合の昇温時間を推定する昇温時間推定部(12)と、各制御ループの制御量を昇温時間の間に設定値変更に応じた量だけ変化させるのに必要な出力を推定し、使用電力総量が割当総電力を超えない必要出力を各制御ループの操作量出力上限値とする電力抑制部(16〜18)と、昇温時間が最大限度時間以内でない場合に、各制御ループの必要出力を、各制御ループの制御量を最大限度時間の間に設定値変更に応じた量だけ変化させるのに必要な操作量として計算し直し、この必要出力を各制御ループの操作量出力上限値として再設定する補正設定部(21)と、制御部(23−i)とを備える。
(もっと読む)
制御装置および方法

【課題】瞬間総エネルギーが一定値を超えないように、かつ温度のオーバーシュートの発生を抑制できる確率が高くなるようにする。
【解決手段】制御装置は、各制御ループLiの昇温電力量PWiを予測する昇温電力量予測部3と、昇温電力量PWiが大きい方から小さい方への順序を各制御ループLiの昇温実行順序として決定する昇温実行順序決定部4と、最初の昇温開始のとき、あるいは昇温対象の制御ループの昇温が進むことにより操作量が下降して電力余裕が生じたと判断されるときに、昇温実行順序に従って昇温対象の制御ループを選択する昇温対象選択部5と、各制御ループLiのヒータに供給する電力の制限操作を行なう電力制限操作部6と、制御ループLi毎に設けられた制御部7−iとから構成される。
(もっと読む)
制御装置の設計支援装置および設計支援方法、ならびに制御装置
【課題】入力信号間または入出力信号間で信号周期が異なる制御装置を簡易に設計する。
【解決手段】本発明にかかる設計支援装置は、第1センサおよび第2センサからの入力信号に基づいて制御対象へ制御信号を出力する制御装置を設計するための設計支援装置であって、第1センサから入力される第1入力信号の入力周期、第2センサから入力される第2入力信号の入力周期、制御対象への制御信号の出力周期を、ユーザから受け付ける周期入力手段と、制御装置の設計情報をユーザから受け付ける設計情報入力手段と、第1入力信号と第2入力信号の信号周期を制御信号の出力周期にレート変換するフィルタ機能と、レート変換された第1入力信号と第2入力信号を入力として前記設計情報にしたがって制御対象への制御信号を演算するための演算機能と、を含むプログラムコードを出力するコード生成手段と、を備える。
(もっと読む)
追加型制御装置およびその制御方法
【課題】既設の主たる制御装置に、容易に追加して制御能力を向上させることができるようにする。
【解決手段】制御対象2の温度をフィードバック制御する主たる制御装置1から出力される主制御信号に基づいて、制御対象2を制御する追加制御信号を出力する追加型制御装置7であって、前記主制御信号を、前記主たる制御装置1と当該追加型制御装置7とが干渉しないように、前記追加制御信号に変換する変換手段を備え、前記変換手段は、前記主制御信号の操作量を演算して、該操作量に予め対応付けられた操作量の前記追加御信号に変換する。
(もっと読む)
位置制御装置の制御パラメータ調整方法及び制御パラメータ調整システム
【課題】複数の駆動系が駆動時に互いに摩擦力を及ぼし合う関係にある位置制御装置の制御パラメータを調整する作業を簡単化する。
【解決手段】位置制御装置28により2つの駆動系のモータ16,24を同時に駆動して各駆動系の位置決めデータを採取し、遺伝的アルゴリズムを用いて各駆動系の位置決めデータの特徴量を評価して、その評価値が要求性能(設計仕様)を満足するように位置制御装置28の制御パラメータを調整する。この際、各駆動系の位置決めデータとして、位置指令波形、実位置波形及びトルク波形を採取し、各駆動系の位置決めデータの特徴量として位置決め波形を評価するようにすると良い。また、調整対象となる制御パラメータは、例えば、位置指令パラメータ、フィードバックゲインパラメータ及びフィードフォワードゲインパラメータである。
(もっと読む)
液体流量制御装置、液体流量制御方法、基板処理装置および記憶媒体
【課題】液体流量制御装置の制御可能総流量範囲を広くすること。
【解決手段】第1の流量制御ユニット21Aは、小流量の第1の制御可能流量範囲を有する第1の流量制御弁23Aを有しており、第2の流量制御ユニット21Bは、大流量の第2の制御流量範囲を有する第2の流量制御弁23Bを有しており、第1および第2の制御流量範囲には重複範囲がある。総流量の要求値の変化に応じて、第1および第2の流量制御ユニットの一方または両方に液体が流れる。第1および第2の流量制御ユニットを流れる液体の合計流量を増大させてゆく過程においては、第1および第2の流量制御ユニットの一方を流れる流量を固定しつつ他方を流れる流量を増大させる。
(もっと読む)
物理量制御装置、物理量制御方法及び物理量制御プログラム
【課題】ザゼンソウ型制御アルゴリズムと、従来の汎用制御アルゴリズムとを融合させ、広範囲な制御対象に対して適応した物理量制御アルゴリズムを提供する。
【解決手段】温度制御装置は、遅延器1、温度センサー3、第1のザゼンソウ型制御部、第2のPID制御部11、エネルギー発生器4,ヒーター5、混合器21を備え、第1のザゼンソウ型制御部は現在温度と前回温度との時間変化勾配をパラメータとし、第2のPID制御部11は現在温度と目標温度との差をパラメータとし、第1のザゼンソウ型制御部と第2のPID制御部11が並列に接続されることを特徴とする。
(もっと読む)
制御装置及び通信管理方法
【課題】通信異常発生時、プロセスデータを取得できるまでの遅延時間を短縮できるよう
にすると共に、分散型制御システムにおける制御動作の安定化を実現できるようにする。
【解決手段】2つの通信バスα及びβに接続され、バス切り換え機能を有して通信バスを
監視し、当該通信バスの一時異常及び正常を判別するCPU10と、通信バスを介してC
PU10に接続され、フィールド機器から入力したプロセスデータを通信バスを介してC
PU10に出力すると共に、通信バスを介して当該CPU10から入力した制御データを
フィールド機器に出力する1つ以上のIOM部14等とを備え、CPU10は、一方の通
信バスの状態が一時異常であると判別したとき、一時異常と判別された通信バスから正常
な状態の通信バスにIOM部14等の接続を切り換えるものである。
(もっと読む)
流体圧アクチュエータの試験装置
【課題】試験体である流体圧アクチュエータに加える負荷の模擬を精度良く行うことが可能な試験装置を提供すること。
【解決手段】流体圧アクチュエータ1に連結され流体圧アクチュエータ1の変位を制御する負荷用アクチュエータ10と、流体圧アクチュエータ10に接続された第1及び第2ポート21,22と流体圧供給源23との連通を切り換えることによって、流体圧アクチュエータ1の作動を切り換える切換弁24と、流体圧アクチュエータ1に加える動的模擬負荷を制御する制御手段50とを備え、制御手段50は、負荷用アクチュエータ10によって制御される流体圧アクチュエータ1の変位と、切換弁24の動作によって制御される第1及び第2ポート21,22の圧力とに基づいて動的模擬負荷を制御する。
(もっと読む)
振動機に油圧流体を供給する油圧ユニットのためのサーボ制御システム
【課題】振動機のエネルギー消費を抑制する。
【解決手段】油圧システム7のためのサーボ制御システムは,油圧流体を受ける少なくとも一つの油圧モータによって回転駆動される偏心ウエイトを含む振動機1又は振動システムに,前記流体を供給する,モータ9により駆動されるポンプ8を含む。振動機1により実際に消費されているエネルギーに関連する,油圧ユニット7のモータ9の回転速度の連続的な適応のための適応手段をさらに含む。
(もっと読む)
閉ループ制御方法、および多チャンネルフィードバックを有する閉ループ制御装置
閉ループ制御方法、および多チャンネルフィードバックを有する閉ループ制御装置
多チャンネルフィードバックを有する閉ループ制御方法を説明する。該方法では、サンプリングレートfAで閉ループ制御変数xをサンプリングすることにより決定されるフィードバック変数r1、および、期間TSにわたる閉ループ制御変数xを平均化することにより決定される、さらなるフィードバック変数r2を、ガイド変数wとそれぞれ別々に比較する。処理において決定される制御エラーe1,e2のそれぞれを、個別閉ループ制御出力変数m1,m2をそれぞれ生成する分離されたコントローラ31,32に入力する。最後に、個別閉ループ制御出力変数m1,m2から生成される閉ループ制御出力変数mを、閉ループ制御変数xがガイド変数wを追従するように、閉ループ制御変数xを調節するために用いる。 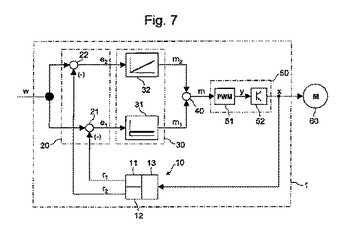 (もっと読む)
(もっと読む)
1 - 11 / 11
[ Back to top ]